Complementi di Interazione Uomo-Macchina
|
|
|
- Enrichetta Ferrari
- 4 anni fa
- Visualizzazioni
Transcript

1 Università di Verona Facoltà di Scienze MM.FF.NN. Corso di Laurea Specialistica in Sistemi Intelligenti e Multimediali Complementi di Interazione Uomo-Macchina Lezione 8 Descrittori di forma Dr. Marco Cristani marco.cristani@univr.it ufficio: Stanza 47, Ca Vignal 2 1
2 Introduzione Descrittore di forma: insieme di numeri prodotti per descrivere una forma l importante è che i descrittori di forma siano discriminativi nei confronti della forma che individuano Un buon descrittore riesce a distinguere fortemente forme differenti e rende simili forme simili (intuitivamente! non esiste un unico concetto di similarità tra forme ) 2
3 Descrittori elementari Alcuni semplici descrittori di forma: Area: il numero di pixel contenuti nella forma Perimetro: il numero di pixel sul contono della forma (Non)Compattezza o (non)circolarità: perimetro^2/area la forma più compatta è il cerchio (4π), tutte le altre forme hanno compattezza > 4π Eccentricità: il rapporto tra la orda piu lunga nella forma e la più lunga corda perpendicolare ad essa Elongazione: il rapporto tra altezza e larghezza del minor rettangolo che racchiude la forma (bounding-box) Rettangolarità: quanto rettangolare è una forma: area della forma/area della bounding-box Orientazione: viene spiegata piu avanti 3
4 Tassonomia Esistono 2 tipologie di descrittori di forma: Region-based basati sull area della forma Boundary-based basati sugli edge della forma Avvertenze: come contare i pixel dei contorni? 1 per i pixel 4-connessi sqrt(2) per i pixel 8-connessi 4
, y(s)>, con x,y particolari funzioni spline nel tempo, parametro t r(s,t) Spline di ordine d funzione polinomiale a tratti ogni tratto (= span) polinomio di ordine d")
5 Descrittori di forma basati sul contorno spline Spline: curve parametriche nello spazio, parametro s, crescente, reale s determina lo sviluppo della curva x(s), y(s), r(s)= < x(s), y(s)>, con x,y particolari funzioni spline nel tempo, parametro t r(s,t) Spline di ordine d funzione polinomiale a tratti ogni tratto (= span) polinomio di ordine d 5
6 Descrittori di forma basati sul contorno spline Ordine = numero di coefficienti necessari a definire un polinomio Grado = massimo esponente del polinomio Ordine = 3, grado = 2 Di solito si usano polinomi di ordine 3 o 4 Per approssimare una curva qualunque Si aumenta l ordine si aumenta il numero di span (scelta migliore computazionalmente) 6
7 Descrittori di forma basati sul contorno B-spline Una spline x(s) puo essere vista come somma pesata di funzioni base (le B-spline, appunto) B n (s), n=0,...,n B -1 da cui si parla di rappresentazione tramite B-spline, o semplicemente B-spline pesi Nel caso più semplice (caso regolare) ogni funzione base è rappresentata da d polinomi ognuno definito su uno span Per semplicità, definiamo uno span avente lunghezza unitaria Tutti gli span sono collegati in corrispondenza di nodi (knots) In questo caso, la curva risultatnte ha continuità d-2 7
8 Funzione di base Esempi: - Funzione base B 0 (s) di ordine d=3 - definita su d=3 span - localizzata (parte da s=0) 8
9 Funzioni di base basi equispaziate Esempi: - Nel caso regolare - Le basi in teoria si definiscono anche all infinito, in pratica 9
10 Creazione di una B-spline Esempi: -Q x individua la forma della curva - la spline approssima i punti dati da <ampiezza esistenza spline(traslata)/2,peso> x 0 3/2 10
11 Forma spazio-temporale di una B-spline Generalizzando, nel caso di una curva in 2D, tempovariante, avro con 11
12 Evoluzione di una B-spline Come posso modificare Q? Due scelte: spazio di dimensione (in questo caso, 26) INCONDIZIONATAMENTE spazio di dimensione < CON VINCOLI (13 punti) 12
13 Evoluzione vincolata di una B-spline Come posso modificare Q? Due scelte: Q=Wx+Q 0 W = matrice di Q 0 INCONDIZIONATAMENTE traduzione o shape matrix N Q x N X x = vettore di forma, CON VINCOLI (13 punti) 13
14 Trasformazioni Voglio avere trasformazioni affini Classe di trasformazioni 2D lineari geometriche che mappano variabili (valori di intensità di pixel localizzati in un immagine) in nuove variabili (in un immagine di output), applicando una combinazione lineare di traslazioni, rotazioni, scalatura, shearing, ossia scalatura non uniforme in determinate direzioni E possibile definire una trasformazione affine di un segmento come 2 x 1 2 x 2 14
15 Trasformazioni affini Traslazione Rotazione Scalatura u u u u = u = 0 0 = 0 M M M 1 = 0 cos = sin = a ( θ ) sin( θ ) ( θ ) cos( θ ) a 0 22 ϴ: angolo positivo che indica rotazioni clockwise 15
16 Esempi di trasformazioni 16
17 Identificatore di una curva Questo significa che ho 6 parametri da settare = 6 gradi di libertà Questi gradi di libertà possono essere linerizzati su un unico vettore x =6 Q=Wx+Q 0 17
18 Matrice di traduzione-shape matrix La matrice di traduzione è x y traslazioni (riguardano) rotazioni/scaling sono vettori con N B componenti (= numero di funzioni base localizzate ~ numero di pesi = numero punti di controllo) Q=Wx+Q 0 18
19 Esempi di identificatori Dati: in pratica: 19
20 Trasformazioni euclidee Semplificando la modellazione, e restringendosi a trasformazioni euclidee ho una diversa matrice di traduzione Original 20
21 Ancora identificatori 21

22 Esercizio Esercizio: a cosa corrisponde questa trasformazione, in termini di fattore di scala e rotazione? scalatura rotazione 22
23 Trasformazioni non rigide Le trasformazioni affini/euclidee sono convenienti per modellare l aspetto del moto 3D di un oggetto rigido Per le situazioni di deformazione (moto non rigido) questi strumenti non sono sufficienti Due soluzioni: 1. Utilizzo dei key-frames semplice ma poco espressivo 2. Learning dello spazio delle deformazioni si utilizza PCA 23
24 Trasformazioni non rigide con key frames Una curva viene vista come combinazione lineare di forme elementari (NB: non modello ora alcuna trasformazione) 24
25 Trasformazioni non rigide con key frames (2) Una curva viene vista come combinazione lineare di forme elementari (NB: non modello ora alcuna trasformazione) Parto dalla solita espressione vincolante la forma della curva Q=Wx+Q 0 Sfrutto i due k-frames e costruisco la matrice di traduzione dove 25
26 Trasformazioni non rigide con key frames (3) A questo punto risulta intuitivo formare nuove configurazioni 26
27 Trasformazioni non rigide con key frames (4) Per includere le trasformazioni (euclidee), la matrice utile risulta essere quindi: 27
28 Trasformazioni non rigide con key frames - limiti Problema: come scegliere i k-frames? quanti k-frames? Se ho una sequenza di M frames, avro Q 1, Q 2,..., Q M forme: sono tutte indicative di forme differenti? Soluzione: N X Se N X >=M, uso la tecnica dei k-frames (per forza), altrimenti uso PCA...out of the scope!!! 28
29 Studio della dinamica di una B-spline Dato una forma in movimento, voglio dedurne la dinamica (da inserire in nel tracking, per esempio) Uso un modello auto regressivo (auto-regressive process, ARP) del secondo ordine = valori estratti da distribuzioni normali = matrice di offset = matrici, componenti deterministiche del sistema = matrice, componente stocastica del sistema 29
30 Studio della dinamica di una B-spline (2) Per semplicità notazionale possiamo vedere anche quindi dove 30
31 Studio della dinamica di una B-spline (3) RICORDA: Lo studio dei parametri puo essere formulato da un punto di vista statistico Voglio massimizzare la likelihood dei dati, dati i parametri Per l indipendenza tra i vettori di forma e il rumore La modello come una normale multivariata 31
32 Studio della dinamica di una B-spline (4) RICORDA: Pertanto la forma della log-likelihood diventa I parametri buoni danno alta likelihood. Quindi la devo massimizzare. E una Normale multivariata, ed esiste forma chiusa per la massimizzazione. 32
33 matrice 33
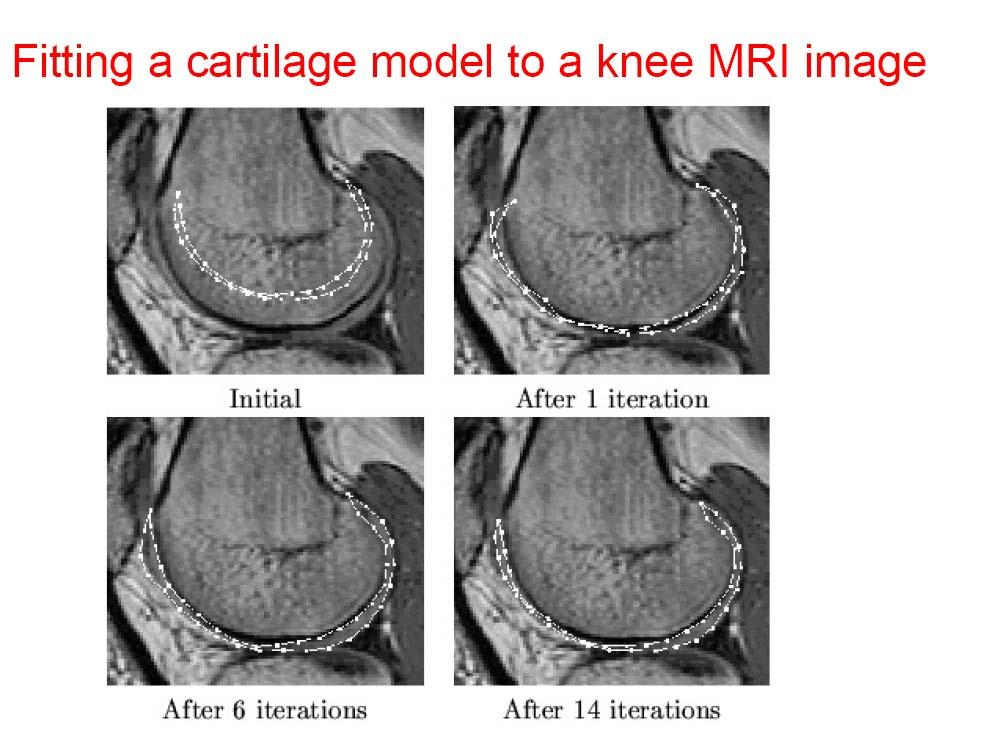
34 Manualmente, Fitting di una B-spline sull immagine determino i punti sul contorno della forma, calcolo la B-spline aumento gli span fino a quando sono soddisfatto del fitting Automaticamente A partire da una forma binaria (ottenuta per esempio via sottrazione del background) estraggo il perimetro campiono il perimetro con una frequenza a piacere, ottengo i nodi calcolo la B-spline 34
35 Applicazione di una B-spline a Condensation Ogni particella è un vettore x che determina un vettore di pesi Q, che nomino come x t-1, da cui origina una B- spline r(s) La fase di selezione o campionamento produce un numero alto di campioni {x t-1 } Ad essi applico la dinamica, ottenendo {x t } 35
36 Applicazione di una B-spline a Condensation (2) {r(s)} La fase di valutazione valuta la spline che fitta meglio l obiettivo 36
37 Applicazione di una B-spline a Condensation (3) r(s) in corrispondenza di M punti equispaziati sulla curva, costruisco dei segmenti normali, di lunghezza fissata a priori 37
38 Applicazione di una B-spline a Condensation (4) r(s) su ogni normale, calcolo gli edge noto che si puo verificare la presenza di piu edge in corrispondenza di una normale 38
39 Applicazione di una B-spline a Condensation (5) La funzione di pesatura o valutazione è dove r(s) con e normale scelta opportunamente 39
 Nota che la")

40 Applicazione di una B-spline a Condensation (6) Nota che la sottrazione del background puo essere inserita nel framework 40
41 41
42 42

43 43
44 44
45 45
46 46
47 47
48 48
49 49
50 50
51 51
Teorie e tecniche del riconoscimento
 Università di Verona Facoltà di Scienze MM.FF.NN. Teorie e tecniche del riconoscimento http://www.adherents.com/lit/comics/img/p/plasticman.jpg Parte 10 Descrittori di forma Dr. Marco Cristani e-mail:
Università di Verona Facoltà di Scienze MM.FF.NN. Teorie e tecniche del riconoscimento http://www.adherents.com/lit/comics/img/p/plasticman.jpg Parte 10 Descrittori di forma Dr. Marco Cristani e-mail:
Funzioni per la descrizione delle immagini
 Funzioni per la descrizione delle immagini Problemi della rappresentazione in piel Visti i limiti del template matching, non è pensabile di realizzare un sistema efficiente di riconoscimento che si basa
Funzioni per la descrizione delle immagini Problemi della rappresentazione in piel Visti i limiti del template matching, non è pensabile di realizzare un sistema efficiente di riconoscimento che si basa
Elementi di matematica - dott. I. GRASSI
 Gli assi cartesiani e la retta. Il concetto di derivata. È ormai d uso comune nei libri, in televisione, nei quotidiani descrivere fenomeni di varia natura per mezzo di rappresentazioni grafiche. Tali
Gli assi cartesiani e la retta. Il concetto di derivata. È ormai d uso comune nei libri, in televisione, nei quotidiani descrivere fenomeni di varia natura per mezzo di rappresentazioni grafiche. Tali
Costruzione di Interfacce Lezione 4 Sistemi di riferimento e trasformazioni. cignoni@iei.pi.cnr.it http://vcg.iei.pi.cnr.
 Costruzione di Interfacce Lezione 4 Sistemi di riferimento e trasformazioni cignoni@iei.pi.cnr.it http://cg.iei.pi.cnr.it/~cignoni Introduzione Punti e ettori sono due cose dierse Basi e sistemi di riferimento
Costruzione di Interfacce Lezione 4 Sistemi di riferimento e trasformazioni cignoni@iei.pi.cnr.it http://cg.iei.pi.cnr.it/~cignoni Introduzione Punti e ettori sono due cose dierse Basi e sistemi di riferimento
Lezioni del 29 settembre e 1 ottobre.
 Lezioni del 29 settembre e 1 ottobre. 1. Ricordiamo informalmente e brevemente la nozione di angolo e di misura di un angolo in radianti nel senso della geometria elementare. Per angolo intendiamo una
Lezioni del 29 settembre e 1 ottobre. 1. Ricordiamo informalmente e brevemente la nozione di angolo e di misura di un angolo in radianti nel senso della geometria elementare. Per angolo intendiamo una
Fondamenti di Grafica 3D Sistemi di riferimento e trasformazioni.
 Fondamenti di Grafica D Sistemi di riferimento e trasformazioni paolo.cignoni@isti.cnr.it http://cg.isti.cnr.it/~cignoni Introduzione Punti e ettori sono due cose dierse Basi e sistemi di riferimento (coordinate
Fondamenti di Grafica D Sistemi di riferimento e trasformazioni paolo.cignoni@isti.cnr.it http://cg.isti.cnr.it/~cignoni Introduzione Punti e ettori sono due cose dierse Basi e sistemi di riferimento (coordinate
Elaborazione nel dominio delle frequenze. Elaborazione delle immagini digitali 1
 Elaborazione nel dominio delle frequenze Elaborazione delle immagini digitali 1 Serie di Fourier Elaborazione delle immagini digitali 2 Introduzione alla trasformata di Fourier Una funzione periodica può
Elaborazione nel dominio delle frequenze Elaborazione delle immagini digitali 1 Serie di Fourier Elaborazione delle immagini digitali 2 Introduzione alla trasformata di Fourier Una funzione periodica può
Funzioni. iniettiva se x y = f (x) f (y) o, equivalentemente, f (x) = f (y) = x = y
 f (y) o, equivalentemente, f (x) = f (y) = x = y") Funzioni. Dati due insiemi A e B (non necessariamente distinti) si chiama funzione da A a B una qualunque corrispondenza (formula, regola) che associa ad ogni elemento di A uno ed un solo elemento di B.
Funzioni. Dati due insiemi A e B (non necessariamente distinti) si chiama funzione da A a B una qualunque corrispondenza (formula, regola) che associa ad ogni elemento di A uno ed un solo elemento di B.
Cinematica. La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane
 Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
0 Richiami di algebra lineare e geometria analitica Distanza, coordinate e vettori Sistemi lineari e matrici...
 Indice 0 Richiami di algebra lineare e geometria analitica........... 9 0.1 Distanza, coordinate e vettori............................. 9 0.2 Sistemi lineari e matrici..................................
Indice 0 Richiami di algebra lineare e geometria analitica........... 9 0.1 Distanza, coordinate e vettori............................. 9 0.2 Sistemi lineari e matrici..................................
AL DI LA DELLE IMMAGINI
 AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
La trasformazione di camera
 La trasformazione di camera 1 Introduzione Per rappresentare un oggetto tridimensionale nello spazio (scena) in un piano bidimensionale (spazio delle immagini, quale il monitor o un foglio) è necessario
La trasformazione di camera 1 Introduzione Per rappresentare un oggetto tridimensionale nello spazio (scena) in un piano bidimensionale (spazio delle immagini, quale il monitor o un foglio) è necessario
vettori V Sia inoltre l angolo che il primo vettore deve percorrere per sovrapporsi al secondo. * **
 Prodotto scalare di vettori. Consideriasmo due vettori u e v e siano O e O due rappresentanti applicati in O. Indichiamo come al solito con u = O la norma (cioè l intensità) del vettore u Sia inoltre l
Prodotto scalare di vettori. Consideriasmo due vettori u e v e siano O e O due rappresentanti applicati in O. Indichiamo come al solito con u = O la norma (cioè l intensità) del vettore u Sia inoltre l
Kernel Methods. Corso di Intelligenza Artificiale, a.a Prof. Francesco Trovò
 Kernel Methods Corso di Intelligenza Artificiale, a.a. 2017-2018 Prof. Francesco Trovò 14/05/2018 Kernel Methods Definizione di Kernel Costruzione di Kernel Support Vector Machines Problema primale e duale
Kernel Methods Corso di Intelligenza Artificiale, a.a. 2017-2018 Prof. Francesco Trovò 14/05/2018 Kernel Methods Definizione di Kernel Costruzione di Kernel Support Vector Machines Problema primale e duale
Curve Spline. Scelta dei valori dei nodi
 Curve Spline (curve d interpolazione) Scelta dei valori dei nodi Il metodo più semplice è porre U 0 =0, U = ovvero U i =i => U i - U i- = P i+ U=i+ P i U=i Svantaggio: non è detto che i nodi sulla curva
Curve Spline (curve d interpolazione) Scelta dei valori dei nodi Il metodo più semplice è porre U 0 =0, U = ovvero U i =i => U i - U i- = P i+ U=i+ P i U=i Svantaggio: non è detto che i nodi sulla curva
Minimi quadrati e massima verosimiglianza
 Minimi quadrati e massima verosimiglianza 1 Introduzione Nella scorsa lezione abbiamo assunto che la forma delle probilità sottostanti al problema fosse nota e abbiamo usato gli esempi per stimare i parametri
Minimi quadrati e massima verosimiglianza 1 Introduzione Nella scorsa lezione abbiamo assunto che la forma delle probilità sottostanti al problema fosse nota e abbiamo usato gli esempi per stimare i parametri
Concetti di teoria dei campioni ad uso degli studenti di Statistica Economica e Finanziaria, A.A. 2017/2018. Giovanni Lafratta
 Concetti di teoria dei campioni ad uso degli studenti di Statistica Economica e Finanziaria, A.A. 2017/2018 Giovanni Lafratta ii Indice 1 Spazi, Disegni e Strategie Campionarie 1 2 Campionamento casuale
Concetti di teoria dei campioni ad uso degli studenti di Statistica Economica e Finanziaria, A.A. 2017/2018 Giovanni Lafratta ii Indice 1 Spazi, Disegni e Strategie Campionarie 1 2 Campionamento casuale
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile
 Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2017-2018 A. Ponno (aggiornato al 20 dicembre 2017) 2 Ottobre 2017 2/10/17 Benvenuto, presentazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2017-2018 A. Ponno (aggiornato al 20 dicembre 2017) 2 Ottobre 2017 2/10/17 Benvenuto, presentazione
PIANIFICAZIONE DI TRAIETTORIE
 PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
0.1 Arco di curva regolare
 .1. ARCO DI CURVA REGOLARE 1.1 Arco di curva regolare Se RC(O, i, j, k ) è un riferimento cartesiano fissato per lo spazio euclideo E, e se v (t) = x(t) i + y(t) j + z(t) k è una funzione a valori vettoriali
.1. ARCO DI CURVA REGOLARE 1.1 Arco di curva regolare Se RC(O, i, j, k ) è un riferimento cartesiano fissato per lo spazio euclideo E, e se v (t) = x(t) i + y(t) j + z(t) k è una funzione a valori vettoriali
Complementi di Interazione Uomo-Macchina
 Università di Verona Facoltà di Scienze MM.FF.NN. Corso di Laurea Specialistica in Sistemi Intelligenti e Multimediali Complementi di Interazione Uomo-Macchina Lezione 4 Tracking e analisi di traiettorie
Università di Verona Facoltà di Scienze MM.FF.NN. Corso di Laurea Specialistica in Sistemi Intelligenti e Multimediali Complementi di Interazione Uomo-Macchina Lezione 4 Tracking e analisi di traiettorie
Table of contents Introduction. Controllo dei Robot. Pianificazione di traiettorie
 Table of contents Introduction Controllo dei Robot Dipartimento di Ing. Elettrica e dell Informazione (DEI) Politecnico di Bari e-mail: paolo.lino [at] poliba.it Controllo dei Robot L obiettivo della pianificazione
Table of contents Introduction Controllo dei Robot Dipartimento di Ing. Elettrica e dell Informazione (DEI) Politecnico di Bari e-mail: paolo.lino [at] poliba.it Controllo dei Robot L obiettivo della pianificazione
Spazi Vettoriali e Vettori
 Spazi Vettoriali e Vettori Basilio Bona DAUIN-Politecnico di Torino 2007 2008 Basilio Bona (DAUIN-Politecnico di Torino) Spazi Vettoriali e Vettori 2007 2008 1 / 20 Vettori e Spazi vettoriali Il concetto
Spazi Vettoriali e Vettori Basilio Bona DAUIN-Politecnico di Torino 2007 2008 Basilio Bona (DAUIN-Politecnico di Torino) Spazi Vettoriali e Vettori 2007 2008 1 / 20 Vettori e Spazi vettoriali Il concetto
Concetti di teoria dei campioni ad uso degli studenti di Statistica Economica e Finanziaria, A.A. 2016/2017. Giovanni Lafratta
 Concetti di teoria dei campioni ad uso degli studenti di Statistica Economica e Finanziaria, A.A. 2016/2017 Giovanni Lafratta ii Indice 1 Spazi, Disegni e Strategie Campionarie 1 2 Campionamento casuale
Concetti di teoria dei campioni ad uso degli studenti di Statistica Economica e Finanziaria, A.A. 2016/2017 Giovanni Lafratta ii Indice 1 Spazi, Disegni e Strategie Campionarie 1 2 Campionamento casuale
Rette e piani nello spazio
 Rette e piani nello spazio Equazioni parametriche di una retta in R 3 : x(t) = x 0 + at r(t) : y(t) = y 0 + bt t R, parametro z(t) = z 0 + ct ovvero r(t) : X(t) = P 0 + vt, t R}, dove: P 0 = (x 0, y 0,
Rette e piani nello spazio Equazioni parametriche di una retta in R 3 : x(t) = x 0 + at r(t) : y(t) = y 0 + bt t R, parametro z(t) = z 0 + ct ovvero r(t) : X(t) = P 0 + vt, t R}, dove: P 0 = (x 0, y 0,
Computazione per l interazione naturale: macchine che apprendono
 Computazione per l interazione naturale: macchine che apprendono Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it
Computazione per l interazione naturale: macchine che apprendono Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it
generazione degli ingressi di riferimento per il sistema di controllo del moto
 PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
Prova di ammissione al Dottorato di Ricerca in Matematica XXX ciclo Università del Salento, 22 settembre 2014
 Prova di ammissione al Dottorato di Ricerca in Matematica XXX ciclo Università del Salento, settembre 04 Tema A Il candidato svolga una e una sola delle dissertazioni proposte, illustrando sinteticamente
Prova di ammissione al Dottorato di Ricerca in Matematica XXX ciclo Università del Salento, settembre 04 Tema A Il candidato svolga una e una sola delle dissertazioni proposte, illustrando sinteticamente
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Il best fitting In molte applicazioni accade di avere una certa quantità di dati (solitamente elevata) e di voler descrivere l andamento del fenomeno che ha
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Il best fitting In molte applicazioni accade di avere una certa quantità di dati (solitamente elevata) e di voler descrivere l andamento del fenomeno che ha
Un cono circolare retto ha area di base 9π cm 2 e altezza 4 cm. L area della superficie totale del cono è di cm 2
 Le due rette r ed s nello spazio sono sghembe (non si intersecano e non sono parallele) e le loro direzioni formano un angolo di 45. Ruotando s attorno ad r si ottiene a) Un piano Un cilindro completo
Le due rette r ed s nello spazio sono sghembe (non si intersecano e non sono parallele) e le loro direzioni formano un angolo di 45. Ruotando s attorno ad r si ottiene a) Un piano Un cilindro completo
Low Level Vision: Trasformata di Hough
 Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT
 SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
REGISTRO DELLE ESERCITAZIONI
 UNIVERSITA DEGLI STUDI DI GENOVA FACOLTA DI SCIENZE MATEMATICHE, FISICHE E NATURALI REGISTRO DELLE ESERCITAZIONI del Corso UFFICIALE di GEOMETRIA A tenute dal prof. Domenico AREZZO nell anno accademico
UNIVERSITA DEGLI STUDI DI GENOVA FACOLTA DI SCIENZE MATEMATICHE, FISICHE E NATURALI REGISTRO DELLE ESERCITAZIONI del Corso UFFICIALE di GEOMETRIA A tenute dal prof. Domenico AREZZO nell anno accademico
Programma svolto Anno scolastico 2011/2012 Professoressa Frare Giovanna Materia Matematica Classe IVginasio B
 Classe IVginasio B Numeri naturali e numeri interi: le operazioni, le potenze e le relative proprietà, espressioni con i numeri naturali. Numeri razionali: le operazioni, le potenze con esponente negativo
Classe IVginasio B Numeri naturali e numeri interi: le operazioni, le potenze e le relative proprietà, espressioni con i numeri naturali. Numeri razionali: le operazioni, le potenze con esponente negativo
Curve e lunghezza di una curva
 Curve e lunghezza di una curva Definizione 1 Si chiama curva il luogo geometrico dello spazio di equazioni parametriche descritto da punto p, chiuso e limitato. Definizione 2 Si dice che il luogo C è una
Curve e lunghezza di una curva Definizione 1 Si chiama curva il luogo geometrico dello spazio di equazioni parametriche descritto da punto p, chiuso e limitato. Definizione 2 Si dice che il luogo C è una
Svolgimento Versione A
 Svolgimento Versione A Esercizio 1 a) Dall espressione data nel testo si ricava subito il grafico di f su [0, ]. Poiché la funzione è pari, simmetrizzando questo rispetto all asse y si ottiene il grafico
Svolgimento Versione A Esercizio 1 a) Dall espressione data nel testo si ricava subito il grafico di f su [0, ]. Poiché la funzione è pari, simmetrizzando questo rispetto all asse y si ottiene il grafico
PROGRAMMA FINALE A.S. 2016/2017. Algebra
 PROGRAMMA FINALE A.S. 2016/2017 MATERIA CLASSE INDIRIZZO DOCENTE LIBRO DI TESTO Matematica I SCIENTIFICO Ermanno Giuseppe FRABOTTA Leonardo Sasso - La Matematica a Colori - BLU - Vol 1 - Petrini Algebra
PROGRAMMA FINALE A.S. 2016/2017 MATERIA CLASSE INDIRIZZO DOCENTE LIBRO DI TESTO Matematica I SCIENTIFICO Ermanno Giuseppe FRABOTTA Leonardo Sasso - La Matematica a Colori - BLU - Vol 1 - Petrini Algebra
Funzioni Reali di Variabile Reale
 Funzioni Reali di Variabile Reale Lezione 2 Prof. Rocco Romano 1 1 Dipartimento di Farmacia Università degli Studi di Salerno Corso di Matematica, 2017/2018 Prof. Rocco Romano (Università Studi Salerno)
Funzioni Reali di Variabile Reale Lezione 2 Prof. Rocco Romano 1 1 Dipartimento di Farmacia Università degli Studi di Salerno Corso di Matematica, 2017/2018 Prof. Rocco Romano (Università Studi Salerno)
Low Level Vision: Trasformata di Hough
 Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
R. Capone Analisi Matematica Integrali multipli
 Integrali multipli Consideriamo, inizialmente il caso degli integrali doppi. Il concetto di integrale doppio è l estensione della definizione di integrale per una funzione reale di una variabile reale
Integrali multipli Consideriamo, inizialmente il caso degli integrali doppi. Il concetto di integrale doppio è l estensione della definizione di integrale per una funzione reale di una variabile reale
Argomento della lezione N. 2. Argomento della lezione N. 1. Argomento della lezione N. 11. Argomento della lezione N. 12
 C. Presilla Modelli e Metodi Matemacici della Fisica a.a. 2015/2016 1 Argomento della lezione N. 1 Argomento della lezione N. 2 Argomento della lezione N. 11 Argomento della lezione N. 12 Fondamenti assiomatici.
C. Presilla Modelli e Metodi Matemacici della Fisica a.a. 2015/2016 1 Argomento della lezione N. 1 Argomento della lezione N. 2 Argomento della lezione N. 11 Argomento della lezione N. 12 Fondamenti assiomatici.
1 Rette e piani nello spazio
 1 Rette e piani nello spazio Esercizio 1.1 È assegnato un riferimento cartesiano 0xyz. Sono assegnati la retta x = t, r : y = t, z = t, il piano π : x + y + z = 0 ed il punto P = (1, 1, 1). Scrivere le
1 Rette e piani nello spazio Esercizio 1.1 È assegnato un riferimento cartesiano 0xyz. Sono assegnati la retta x = t, r : y = t, z = t, il piano π : x + y + z = 0 ed il punto P = (1, 1, 1). Scrivere le
26 - Funzioni di più Variabili Limiti e Derivate
 Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 26 - Funzioni di più Variabili Limiti e Derivate Anno Accademico 2013/2014 M.
Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 26 - Funzioni di più Variabili Limiti e Derivate Anno Accademico 2013/2014 M.
Argomenti Capitolo 1 Richiami
 Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
Immagini digitali. Georges Seurat ( ),"Un dimanche ' été à l' Ile de la Grande Jatte"
,Un dimanche ' été à l' Ile de la Grande Jatte") Immagini digitali Digitalizzazione o acquisizione di immagini del mondo reale (es. da una fotografia). Analogia con la scuola divisionista o puntinista Georges Seurat (1859-1891),"Un dimanche ' été à l'
Immagini digitali Digitalizzazione o acquisizione di immagini del mondo reale (es. da una fotografia). Analogia con la scuola divisionista o puntinista Georges Seurat (1859-1891),"Un dimanche ' été à l'
trasformazioni omogenee
 Moti rigidi idi generali e trasformazioni omogenee Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Trasformazioni rigide generali Rotazione fra due sistemi di riferimento
Moti rigidi idi generali e trasformazioni omogenee Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Trasformazioni rigide generali Rotazione fra due sistemi di riferimento
DIPARTIMENTO DI ARCHITETTURA E DISEGNO INDUSTRIALE Anno Accademico 2017/18 Registro lezioni del docente FERONE ADELE
 DIPARTIMENTO DI ARCHITETTURA E DISEGNO INDUSTRIALE Anno Accademico 2017/18 Registro lezioni del docente FERONE ADELE Attività didattica ISTITUZIONI DI MATEMATICHE [A0014] Partizionamento: Cognomi A-L Periodo
DIPARTIMENTO DI ARCHITETTURA E DISEGNO INDUSTRIALE Anno Accademico 2017/18 Registro lezioni del docente FERONE ADELE Attività didattica ISTITUZIONI DI MATEMATICHE [A0014] Partizionamento: Cognomi A-L Periodo
LEZIONE 9. k, tenendo conto delle formule che permettono di calcolare il prodotto scalare ed il prodotto vettoriale, otteniamo
 LEZIONE 9 9.1. Prodotto misto. Siano dati i tre vettori geometrici u, v, w V 3 (O) definiamo prodotto misto di u, v e w il numero u, v w. Fissiamo un sistema di riferimento O ı j k in S 3. Se u = u x ı
LEZIONE 9 9.1. Prodotto misto. Siano dati i tre vettori geometrici u, v, w V 3 (O) definiamo prodotto misto di u, v e w il numero u, v w. Fissiamo un sistema di riferimento O ı j k in S 3. Se u = u x ı
Lezione XXI Sistemi vibranti a 1gdl-Moto forzato non smorzato MOTI FORZATI PER SPOSTAMENTO DI VINCOLO
 Sistemi vibranti a gdl-moto forzato non smorzato MOTI FORZATI PER SPOSTAMETO DI VICOLO Consideriamo il solito sistema che si muova rispetto a un osservatore assoluto con una legge \W nota. \W Scrivendo
Sistemi vibranti a gdl-moto forzato non smorzato MOTI FORZATI PER SPOSTAMETO DI VICOLO Consideriamo il solito sistema che si muova rispetto a un osservatore assoluto con una legge \W nota. \W Scrivendo
Domande di Analisi Matematica tratte dai Test di autovalutazione o di recupero dei debiti formativi.
 Domande di Analisi Matematica tratte dai Test di autovalutazione o di recupero dei debiti formativi. (1) Sia A l insieme dei numeri dispari minori di 56 e divisibili per 3. Quale delle seguenti affermazioni
Domande di Analisi Matematica tratte dai Test di autovalutazione o di recupero dei debiti formativi. (1) Sia A l insieme dei numeri dispari minori di 56 e divisibili per 3. Quale delle seguenti affermazioni
01CXGBN Trasmissione numerica
 0CXGBN rasmissione numerica parte 3: Spazio dei segnali, rappresentazione vettoriale Lo spazio dei segnali Introduciamo una rappresentazione vettoriale dei segnali della costellazione M Serve a semplificare
0CXGBN rasmissione numerica parte 3: Spazio dei segnali, rappresentazione vettoriale Lo spazio dei segnali Introduciamo una rappresentazione vettoriale dei segnali della costellazione M Serve a semplificare
Se la funzione è analiticamente invertibile, estratto q, si può ricavare x = x(q).
.") La tecnica Monte Carlo Il metodo Monte Carlo è basato sulla scelta di eventi fisici con una probabilità di accadimento nota a priori. sia p(x) la distribuzione di probabilità con la quale si manifesta
La tecnica Monte Carlo Il metodo Monte Carlo è basato sulla scelta di eventi fisici con una probabilità di accadimento nota a priori. sia p(x) la distribuzione di probabilità con la quale si manifesta
INTERPOLAZIONI CON SPLINE
 INTERPOLAZIONI CON SPLINE Assegnati gli n +1valori che la funzione f assume nei nodi x i, si costruisce un interpolazione polinomiale a tratti. In ognuno degli intervalli [x i 1,x i ] il polinomio interpolatore
INTERPOLAZIONI CON SPLINE Assegnati gli n +1valori che la funzione f assume nei nodi x i, si costruisce un interpolazione polinomiale a tratti. In ognuno degli intervalli [x i 1,x i ] il polinomio interpolatore
Analisi Matematica 1 Ingegneria Informatica Gruppo 4, canale 6
 Analisi Matematica Ingegneria Informatica Gruppo 4, canale 6 Argomenti 5 ottobre 07 I simboli i, j, k, m, n indicano sempre numeri naturali variabili. I simboli p, q, r, s, t,..., x, y, z indicano numeri
Analisi Matematica Ingegneria Informatica Gruppo 4, canale 6 Argomenti 5 ottobre 07 I simboli i, j, k, m, n indicano sempre numeri naturali variabili. I simboli p, q, r, s, t,..., x, y, z indicano numeri
Trasformazioni - II. Classificazione delle trasformazioni in R 3. Rotazioni in R 3. Lezione 6 Maggio Lezione 6 maggio 2003
 Corso di Laurea in Disegno Industriale Corso di Metodi Numerici per il Design Lezione 6 maggio Trasformazioni - II F. Caliò Classificazione delle trasformazioni in R (TITOLO) Rotazioni in R (TITOLO) Rotazione
Corso di Laurea in Disegno Industriale Corso di Metodi Numerici per il Design Lezione 6 maggio Trasformazioni - II F. Caliò Classificazione delle trasformazioni in R (TITOLO) Rotazioni in R (TITOLO) Rotazione
PROGRAMMA DI MATEMATICA
 Classe 2^ sez. A 1. Ripasso Operazioni tra polinomi, prodotti notevoli, equazioni di primo grado intere e frazionarie. Problemi risolvibili con le equazioni di primo grado. 2. Sistemi Sistemi di equazioni
Classe 2^ sez. A 1. Ripasso Operazioni tra polinomi, prodotti notevoli, equazioni di primo grado intere e frazionarie. Problemi risolvibili con le equazioni di primo grado. 2. Sistemi Sistemi di equazioni
Corso di Fisica. Lezione 3 Scalari e vettori Parte 2
 Corso di Fisica Lezione 3 Scalari e vettori Parte 2 Algebra vettoriale Negli anni trascorsi si sono studiate le regole dell algebra applicate agli scalari Ora occorre definire le regole algebriche per
Corso di Fisica Lezione 3 Scalari e vettori Parte 2 Algebra vettoriale Negli anni trascorsi si sono studiate le regole dell algebra applicate agli scalari Ora occorre definire le regole algebriche per
Tipi di polso robotico 2 gdl
 Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
A.A. 2014/2015 Corso di Algebra Lineare
 A.A. 2014/2015 Corso di Algebra Lineare Stampato integrale delle lezioni Massimo Gobbino Indice Lezione 01: Vettori geometrici nel piano cartesiano. Operazioni tra vettori: somma, prodotto per un numero,
A.A. 2014/2015 Corso di Algebra Lineare Stampato integrale delle lezioni Massimo Gobbino Indice Lezione 01: Vettori geometrici nel piano cartesiano. Operazioni tra vettori: somma, prodotto per un numero,
1. Si scelga a caso un punto X dell intervallo [0, 2], con distribuzione uniforme di densità. f X (x) = [0,2](x)
![1. Si scelga a caso un punto X dell intervallo [0, 2], con distribuzione uniforme di densità. f X (x) = [0,2](x)](/thumbs/97/134407840.jpg "1. Si scelga a caso un punto X dell intervallo [0, 2], con distribuzione uniforme di densità. f X (x) = [0,2](x)") Esercizi di Calcolo delle Probabilità della 3 a settimana (Corso di Laurea in Matematica, Università degli Studi di Padova). Esercizio.. Sia (X, Y ) un vettore aleatorio bidimensionale con densità uniforme
Esercizi di Calcolo delle Probabilità della 3 a settimana (Corso di Laurea in Matematica, Università degli Studi di Padova). Esercizio.. Sia (X, Y ) un vettore aleatorio bidimensionale con densità uniforme
; r 0 2 m = l 2 (s 2 θ + c 2 θ) = l 2
 = l 2") 1 Calcolo del momento d inerzia Esercizio I.1 Pendolo semplice Si faccia riferimento alla Figura 1, dove è rappresentato un pendolo semplice; si utilizzeranno diversi sistemi di riferimento: il primo,
1 Calcolo del momento d inerzia Esercizio I.1 Pendolo semplice Si faccia riferimento alla Figura 1, dove è rappresentato un pendolo semplice; si utilizzeranno diversi sistemi di riferimento: il primo,
Vibrazioni Meccaniche
 Vibrazioni Meccaniche A.A. 2-22 Esempi di scrittura dell equazione di moto per sistemi a 2 gdl Turbina Una turbina pone in rotazione un generatore elettrico per mezzo della trasmissione schematizzata in
Vibrazioni Meccaniche A.A. 2-22 Esempi di scrittura dell equazione di moto per sistemi a 2 gdl Turbina Una turbina pone in rotazione un generatore elettrico per mezzo della trasmissione schematizzata in
25 - Funzioni di più Variabili Introduzione
 Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 25 - Funzioni di più Variabili Introduzione Anno Accademico 2013/2014 M. Tumminello
Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 25 - Funzioni di più Variabili Introduzione Anno Accademico 2013/2014 M. Tumminello
Corso di Laurea in Matematica Analisi Numerica (1 mod., 6 crediti, 48 ore, a.a , lez.3)
") Docente: Marco Gaviano (e-mail:gaviano@unica.it) Corso di Laurea in Matematica Analisi Numerica (1 mod., 6 crediti, 48 ore, a.a. 2014-2015, lez.3) 1 Analisi Numerica 1 mod. a.a. 2014-2015, Lezione n.3
Docente: Marco Gaviano (e-mail:gaviano@unica.it) Corso di Laurea in Matematica Analisi Numerica (1 mod., 6 crediti, 48 ore, a.a. 2014-2015, lez.3) 1 Analisi Numerica 1 mod. a.a. 2014-2015, Lezione n.3
Robotica I. Test 11 Novembre 2009
 Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
PRBS. Pseudo Random Binary Sequence
 PRBS Pseudo Random Binary Sequence MARTINA FAVARO Dipartimento di Ingegneria dell Informazione, Università di Padova Lezione n.2 Che cosa é una PRBS? É noto che il segnale di input in un processo di identificazione
PRBS Pseudo Random Binary Sequence MARTINA FAVARO Dipartimento di Ingegneria dell Informazione, Università di Padova Lezione n.2 Che cosa é una PRBS? É noto che il segnale di input in un processo di identificazione
How to compute the sun vector for path planning
 How to compute the sun vector for path planning 1 Calcolo dell illuminazione delle celle solari Si consideri la Fig. 1. Il rover si sposta sulla mappa, variando nel tempo la sua posizione p = ( x y z )
How to compute the sun vector for path planning 1 Calcolo dell illuminazione delle celle solari Si consideri la Fig. 1. Il rover si sposta sulla mappa, variando nel tempo la sua posizione p = ( x y z )
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
10 ottobre Marina Bertolini Dipartimento di Matematica F.Enriques Università degli Studi di Milano
 Fondamenti e didattica della matematica - Geometria - Corso speciale - Facoltà di Scienze della Formazione - Università Milano Bicocca - a.a. 2007-2008 10 ottobre 2007 Marina Bertolini (marina.bertolini@mat.unimi.it)
Fondamenti e didattica della matematica - Geometria - Corso speciale - Facoltà di Scienze della Formazione - Università Milano Bicocca - a.a. 2007-2008 10 ottobre 2007 Marina Bertolini (marina.bertolini@mat.unimi.it)
modellazione orientata agli oggetti object-based entità/oggetto = non suddivisibile in entità dello stesso tipo Entità/oggetto spaziale:
 modalità di rappresentazione field-based approach modellazione riferimento spaziale dominio degli attributi orientata agli oggetti insieme degli oggetti object-based approach spazio sono l uno l inverso
modalità di rappresentazione field-based approach modellazione riferimento spaziale dominio degli attributi orientata agli oggetti insieme degli oggetti object-based approach spazio sono l uno l inverso
Introduzione ai numeri complessi. Federico Lastaria. Analisi e Geometria 1. Numeri Complessi 1/16
 Introduzione ai numeri complessi Federico Lastaria. Analisi e Geometria 1. Numeri Complessi 1/16 Definizione (Campo complesso C. Prima definizione.) Il campo complesso C è costituito da tutte le espressioni
Introduzione ai numeri complessi Federico Lastaria. Analisi e Geometria 1. Numeri Complessi 1/16 Definizione (Campo complesso C. Prima definizione.) Il campo complesso C è costituito da tutte le espressioni
2.2.5 Approssimazione di un segnale in una base biortogonale (segnali rettangolari) Esercizi proposti... 46
 Esercizi proposti... 46") Indice 1 Operazioni elementari, convoluzione, correlazione 1 1.1 Operazioni elementari........................ 1 1.1.1 Ribaltamento, traslazione, scalatura............ 1 1.2 Convoluzione.............................
Indice 1 Operazioni elementari, convoluzione, correlazione 1 1.1 Operazioni elementari........................ 1 1.1.1 Ribaltamento, traslazione, scalatura............ 1 1.2 Convoluzione.............................
Vettori e geometria analitica in R 3 1 / 25
 Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
Registro di Istituzioni di Matematica /17 - F. Demontis 2
 Registro delle lezioni di ISTITUZIONI ED ESERCITAZIONI DI MATEMATICA 2 Corso di Laurea in Chimica 6 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: 8 giugno 2017 1. Mercoledì 01/03/2017,
Registro delle lezioni di ISTITUZIONI ED ESERCITAZIONI DI MATEMATICA 2 Corso di Laurea in Chimica 6 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: 8 giugno 2017 1. Mercoledì 01/03/2017,
Programma di Matematica IB,a.a.2015/2016
 Programma di Matematica IB,a.a.2015/2016 Liceo Scientifico M. Malpighi prof. Lorenzo Asti Algebra I numeri razionali Le operazioni in Q Le potenze con esponente positivo e negativo Monomi e polinomi I
Programma di Matematica IB,a.a.2015/2016 Liceo Scientifico M. Malpighi prof. Lorenzo Asti Algebra I numeri razionali Le operazioni in Q Le potenze con esponente positivo e negativo Monomi e polinomi I
PROGRAMMA DI MATEMATICA
 Classe: IE Indirizzo: artistico-grafico PROGRAMMA DI MATEMATICA I numeri naturali e i numeri interi 1. Che cosa sono i numeri naturali 2. Le quattro operazioni 3. I multipli e i divisori di un numero 4.
Classe: IE Indirizzo: artistico-grafico PROGRAMMA DI MATEMATICA I numeri naturali e i numeri interi 1. Che cosa sono i numeri naturali 2. Le quattro operazioni 3. I multipli e i divisori di un numero 4.
DECLINAZIONE COMPETENZE SCUOLA PRIMARIA: MATEMATICA CLASSI 1 a 2 a 3 a
 DECLINAZIONE COMPETENZE SCUOLA PRIMARIA: MATEMATICA CLASSI 1 a 2 a 3 a COMPETENZE 1. Operare con i numeri nel calcolo scritto e mentale CONOSCENZE CONTENUTI A. I numeri da 0 a 20 B. I numeri da 20 a 100
DECLINAZIONE COMPETENZE SCUOLA PRIMARIA: MATEMATICA CLASSI 1 a 2 a 3 a COMPETENZE 1. Operare con i numeri nel calcolo scritto e mentale CONOSCENZE CONTENUTI A. I numeri da 0 a 20 B. I numeri da 20 a 100
Argomenti delle singole lezioni del corso di Analisi Matematica 2 (Ingegneria Edile-Architettura, A.A )
") Argomenti delle singole lezioni del corso di Analisi Matematica 2 (Ingegneria Edile-Architettura, A.A. 2018-19) NB. Le indicazioni bibliografiche si riferiscono al libro di testo. Lezione nr. 1, 24/9/2018.
Argomenti delle singole lezioni del corso di Analisi Matematica 2 (Ingegneria Edile-Architettura, A.A. 2018-19) NB. Le indicazioni bibliografiche si riferiscono al libro di testo. Lezione nr. 1, 24/9/2018.
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
Ferruccio Orecchia. esercizi di GEOMETRIA 1
 A01 102 Ferruccio Orecchia esercizi di GEOMETRIA 1 Copyright MCMXCIV ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133 A/B 00173 Roma (06) 93781065 ISBN 978
A01 102 Ferruccio Orecchia esercizi di GEOMETRIA 1 Copyright MCMXCIV ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133 A/B 00173 Roma (06) 93781065 ISBN 978
CLASSE I D. Anno scolastico 2017/2018
 PROGRAMMA DI MATEMATICA Prof. MINARDA ELISABETTA CLASSE I D Anno scolastico 2017/2018 ARITMETICA: L insieme dei numeri naturali- Operazioni- Calcolo del M.C.D e del m.c.m- I sistemi di numerazione. L insieme
PROGRAMMA DI MATEMATICA Prof. MINARDA ELISABETTA CLASSE I D Anno scolastico 2017/2018 ARITMETICA: L insieme dei numeri naturali- Operazioni- Calcolo del M.C.D e del m.c.m- I sistemi di numerazione. L insieme
Argomento della lezione N. 11. Argomento della lezione N. 12. Argomento della lezione N. 13. Argomento della lezione N. 14
 C. Presilla Modelli e Metodi Matemacici della Fisica a.a. 2016/2017 1 Argomento della lezione N. 1 Argomento della lezione N. 2 Argomento della lezione N. 11 Argomento della lezione N. 12 Fondamenti assiomatici.
C. Presilla Modelli e Metodi Matemacici della Fisica a.a. 2016/2017 1 Argomento della lezione N. 1 Argomento della lezione N. 2 Argomento della lezione N. 11 Argomento della lezione N. 12 Fondamenti assiomatici.
FISICA APPLICATA 2 FENOMENI ONDULATORI - 2
 FISICA APPLICATA 2 FENOMENI ONDULATORI - 2 DOWNLOAD Il pdf di questa lezione (onde2.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 10/10/2017 LE ONDE NELLO SPAZIO Finora si è considerata
FISICA APPLICATA 2 FENOMENI ONDULATORI - 2 DOWNLOAD Il pdf di questa lezione (onde2.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 10/10/2017 LE ONDE NELLO SPAZIO Finora si è considerata
Trasformazioni Spaziali
 http://imagelab.ing.unimo.it Dispense del corso di Elaborazione di Immagini e Audio Digitali Trasformazioni Spaziali Prof. Roberto Vezzani Trasformazioni Spaziali A differenza di un filtro convolutivo,
http://imagelab.ing.unimo.it Dispense del corso di Elaborazione di Immagini e Audio Digitali Trasformazioni Spaziali Prof. Roberto Vezzani Trasformazioni Spaziali A differenza di un filtro convolutivo,
Metodi Numerici con elementi di Programmazione (A.A )
") Metodi Numerici con elementi di Programmazione (A.A. 2013-2014) Metodi Numerici Appunti delle lezioni: Approssimazione di dati e funzioni Approssimazione ai minimi quadrati Docente Vittoria Bruni Email:
Metodi Numerici con elementi di Programmazione (A.A. 2013-2014) Metodi Numerici Appunti delle lezioni: Approssimazione di dati e funzioni Approssimazione ai minimi quadrati Docente Vittoria Bruni Email:
Esami di Idoneità/Integrativi. Liceo delle Scienze Umane / Economico Sociale / Linguistico
 Esami di Idoneità/Integrativi Liceo delle Scienze Umane / Economico Sociale / Linguistico Materia: MATEMATICA Alla Classe seconda Contenuti essenziali TEORIA DEGLI INSIEMI Rappresentazioni Sottoinsiemi
Esami di Idoneità/Integrativi Liceo delle Scienze Umane / Economico Sociale / Linguistico Materia: MATEMATICA Alla Classe seconda Contenuti essenziali TEORIA DEGLI INSIEMI Rappresentazioni Sottoinsiemi
Ricordiamo brevemente come possono essere rappresentate le rette nel piano: 1) mediante un'equazione cartesiana. = ( p 1
 mediante un'equazione cartesiana. = ( p 1") Introduzione Nella computer grafica, gli oggetti geometrici sono definiti a partire da un certo numero di elementi di base chiamati primitive grafiche Possono essere punti, rette e segmenti, curve, superfici
Introduzione Nella computer grafica, gli oggetti geometrici sono definiti a partire da un certo numero di elementi di base chiamati primitive grafiche Possono essere punti, rette e segmenti, curve, superfici
Curve nel piano ane euclideo e nello spazio ane euclideo
 Curve nel piano ane euclideo e nello spazio ane euclideo 13 Dicembre 2018 Federico Lastaria. Analisi e Geometria 1. Curve nel piano e nello spazio. 1/29 Curve parametrizzate regolari e biregolari. Denizione
Curve nel piano ane euclideo e nello spazio ane euclideo 13 Dicembre 2018 Federico Lastaria. Analisi e Geometria 1. Curve nel piano e nello spazio. 1/29 Curve parametrizzate regolari e biregolari. Denizione
Alcuni concetti geometrici
 Alcuni concetti geometrici spazio Euclideo bidimensionale X P x 1 x 1 x x 11 x 1 x 1 x x 1 P 1 P 1 (x 11, x 1 ) P (x 1, x ) O x 11 x 1 X 1 O (0, 0) In generale,, in uno spazio Euclideo p-dimensionale il
Alcuni concetti geometrici spazio Euclideo bidimensionale X P x 1 x 1 x x 11 x 1 x 1 x x 1 P 1 P 1 (x 11, x 1 ) P (x 1, x ) O x 11 x 1 X 1 O (0, 0) In generale,, in uno spazio Euclideo p-dimensionale il
Liceo scientifico Marie Curie. Programma di MATEMATICA
 Liceo scientifico Marie Curie Programma di MATEMATICA Classe IV ginnasio A A.S.2010/11 ALGEBRA I numeri razionali Operazioni ed espressioni Potenze con esponente intero negativo Insiemi e logica Le rappresentazioni
Liceo scientifico Marie Curie Programma di MATEMATICA Classe IV ginnasio A A.S.2010/11 ALGEBRA I numeri razionali Operazioni ed espressioni Potenze con esponente intero negativo Insiemi e logica Le rappresentazioni
 Indice 1 Spazi a dimensione finita... 1 1.1 Primi esempi di strutture vettoriali... 1 1.2 Spazi vettoriali (a dimensione finita)...... 3 1.3 Matrici come trasformazioni lineari...... 5 1.4 Cambiamenti
Indice 1 Spazi a dimensione finita... 1 1.1 Primi esempi di strutture vettoriali... 1 1.2 Spazi vettoriali (a dimensione finita)...... 3 1.3 Matrici come trasformazioni lineari...... 5 1.4 Cambiamenti
Elaborazione delle immagini a basso livello
 Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Elementi di Algebra Lineare Spazi Vettoriali
 Elementi di Algebra Lineare Spazi Vettoriali Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017) Elementi di Algebra Lineare 1 / 41 index Spazi vettoriali
Elementi di Algebra Lineare Spazi Vettoriali Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017) Elementi di Algebra Lineare 1 / 41 index Spazi vettoriali
Registro di Matematica /19 - F. Demontis 2
 Registro delle lezioni di MATEMATICA 1 Corso di Laurea in Chimica 6 CFU - A.A. 2018/2019 docente: Francesco Demontis ultimo aggiornamento: 11 gennaio 2019 1. Mercoledì 03/10/2018, 11 13. ore: 2(2) Linguaggio
Registro delle lezioni di MATEMATICA 1 Corso di Laurea in Chimica 6 CFU - A.A. 2018/2019 docente: Francesco Demontis ultimo aggiornamento: 11 gennaio 2019 1. Mercoledì 03/10/2018, 11 13. ore: 2(2) Linguaggio
FISICA APPLICATA 2 FENOMENI ONDULATORI - 1
 FISICA APPLICATA 2 FENOMENI ONDULATORI - 1 DOWNLOAD Il pdf di questa lezione (onde1.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 08/10/2012 FENOMENI ONDULATORI Una classe di fenomeni
FISICA APPLICATA 2 FENOMENI ONDULATORI - 1 DOWNLOAD Il pdf di questa lezione (onde1.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 08/10/2012 FENOMENI ONDULATORI Una classe di fenomeni
Modellazione e calcolo assistito di strutture meccaniche. Lezione 6 Integrazione ridotta Calcolo degli sforzi - Convergenza
 Modellazione e calcolo assistito di strutture meccaniche Lezione 6 Integrazione ridotta Calcolo degli sforzi - Convergenza 1 Integrazione ridotta 2 Si giustifica per due motivi: 1. migliore rappresentazione
Modellazione e calcolo assistito di strutture meccaniche Lezione 6 Integrazione ridotta Calcolo degli sforzi - Convergenza 1 Integrazione ridotta 2 Si giustifica per due motivi: 1. migliore rappresentazione
Corso di Metodi Matematici per l Ingegneria A.A. 2016/2017 Domande-tipo di teoria sulla prima metà del corso
 Corso di Metodi Matematici per l Ingegneria A.A. 2016/2017 Domande-tipo di teoria sulla prima metà del corso Marco Bramanti Politecnico di Milano October 28, 2016 1. Elementi di analisi funzionale 1.1.
Corso di Metodi Matematici per l Ingegneria A.A. 2016/2017 Domande-tipo di teoria sulla prima metà del corso Marco Bramanti Politecnico di Milano October 28, 2016 1. Elementi di analisi funzionale 1.1.
UNIVERSITÀ DEGLI STUDI DI TRENTO
 UNIVERSITÀ DEGLI STUDI DI TRENTO PROVA DI AMMISSIONE AI CORSI DI LAUREA IN Fisica Matematica Informatica Ingegneria dell Informazione e Organizzazione d Impresa, Ingegneria dell Informazione e delle Comunicazioni
UNIVERSITÀ DEGLI STUDI DI TRENTO PROVA DI AMMISSIONE AI CORSI DI LAUREA IN Fisica Matematica Informatica Ingegneria dell Informazione e Organizzazione d Impresa, Ingegneria dell Informazione e delle Comunicazioni
SYLLABUS DI GEOMETRIA ANALITICA 3A DON BOSCO
 SYLLABUS DI GEOMETRIA ANALITICA 3A DON BOSCO 2014-15 Si precisa che, con questo syllabus, l intenzione non è quella di ridurre l apprendimento della matematica allo studio mnemonico di una serie di procedure.
SYLLABUS DI GEOMETRIA ANALITICA 3A DON BOSCO 2014-15 Si precisa che, con questo syllabus, l intenzione non è quella di ridurre l apprendimento della matematica allo studio mnemonico di una serie di procedure.
Geometria. Geometria euclidea e geometrie non euclidee
 Geometria Paolo Montanari Appunti di Matematica Geometria 1 Geometria euclidea e geometrie non euclidee La geometria euclidea è un sistema matematico attribuito al matematico alessandrino Euclide, che
Geometria Paolo Montanari Appunti di Matematica Geometria 1 Geometria euclidea e geometrie non euclidee La geometria euclidea è un sistema matematico attribuito al matematico alessandrino Euclide, che