L idea alla base del PID èdi avere un architettura standard per il controllo di processo
|
|
|
- Gilda Arcuri
- 8 anni fa
- Visualizzazioni
Transcript
1 CONTROLLORI PID

2 PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione della temperatura in un recipiente, dalla movimentazione di un braccio robotico al controllo di un freno per banchi prova motori L unica cosa su cui agire per far variare il comportamento di un PID e adattarlo alle varie esigenze èla regolazione dei parametri di guadagno proporzionale, integrale e derivativo K P K I K D FEEDBACK

3 REGOLATORI PID r t = riferimento y t = grandezza da controllare e t = errore d t = disturbo additivo all uscita u t = uscita del controllore n t = rumore di misura

4 REGOLATORI PID In un regolatore PID la variabile in uscita ut viene generata in base al contributo di tre termini: Il primo è proporzionale all errore tra il riferimento r t e la variabile da controllare y t Il secondo è proporzionale all integrale dell errore e t, quindi possiamo dire che dipende dal valor medio dell errore Il terzo è invece proporzionale alla derivata dell errore, ciò significa che risente della velocità di variazione dell errore stesso La legge di controllo dei PID può essere scritta come : Dove : K P = guadagno proporzionale K I = guadagno integrale K D = guadagno derivativo

5 REGOLATORI PID

6 REGOLATORI PID Riconsideriamo la legge di controllo ideale dei PID nel dominio del tempo: Abbiamo detto che facendone la trasformata di Laplace otteniamo: che rappresenta un sistema DINAMICO IMPROPRIO e LINEARE TEMPO INVARIANTE, il che lo rende fisicamente irrealizzabile. Per ovviare a tale problema allora se ne filtra l azione derivativa (componente non fisicamente realizzabile) ottenendo la legge di controllo reale :

7 REGOLATORI PID A questo punto possiamo scrivere la funzione di trasferimento* come : Schematizzando idealmente l uscita come somma dei tre contributi proporzionale, integrale e derivativo: *ossia il legame tra e t e u t

8 AZIONE PROPORZIONALE r (t) + e (t) u (t) y (t) K P G (s)
 y (t) K")
9 AZIONE PROPORZIONALE

10 AZIONE PROPORZIONALE

11 AZIONE INTEGRALE L azione integrale ha il compito di far sì che a regime la variabile controllata assuma il valore di set point L azione integrale può essere vista come un dispositivo per l azzeramento dell errore a regime introdotto dall azione proporzionale I controllori PI permettono di ottenere una maggiore precisione senza peggiorare la stabilità del sistema; garantiscono inoltre una maggior velocità i risposta del sistema r (t) + e (t) u (t) y (t) G (s)
 + e (t)")
12 AZIONE INTEGRALE

13 AZIONE DERIVATIVA Lo scopo dell azione derivativa è quello di migliorare la stabilità del ciclo chiuso. L azione derivativa fornisce in uscita la derivata rispetto al tempo dell errore e t, per tale motivo i controllori ad azione derivativa vengono anche chiamati controllori di velocità o anticipatori. Non sempre i controllori hanno bisogno anche di questa azione: spesso si hanno semplici controllori P o PI. I controllori ad azione derivativa, infatti presentano l inconveniente di amplificare i segnali con contenuto armonico a frequenze elevate, che tipicamente caratterizza il rumore elettromagnetico sovrapposto al segnale utile. Ciò può introdurre una instabilità nel sistema compromettendo la qualità del controllo.

14 AZIONE DERIVATIVA Il meccanismo di instabilità può essere intuitivamente descritto come segue: a causa del fatto che il sistema è dinamico, ci vorrà un certo tempo affinché un cambiamento delle uscite u t provochi una variazione sensibile della variabile controllata y t, ma conoscendo la velocità di variazione dell errore nel tempo è possibile predirne l andamento estrapolandolo dalla tangente alla curva dell errore stesso Il controllo dell uscita è così proporzionale all errore stimato nell istante T D successivo e la stima è ottenuta da un estrapolazione lineare e t e (t+td ) e t

15 AZIONE DERIVATIVA

16 TARATURA DEI PID Il principale vantaggio nell utilizzo dei PID è che possono essere utilizzati anche senza conoscere un modello dettagliato del processo Grazie a procedure di taratura empiriche è possibile calcolare i guadagni basandosi solo su semplici prove sperimentali da effettuare direttamente sull impianto Richiamando lo schema più generale:

17 TARATURA AD ANELLO APERTO DETTO ANCHE PRIMO METODO DI ZIEGLER NICHOLS OBIETTIVO: definire i guadagni del controllore PID METODO: prove sperimentali sull impianto e formule semi empiriche per il calcolo dei guadagni 1. Ci si pone nelle condizioni in cui il PID sia disinserito (anello aperto) 2. Si eccita il sistema con un gradino (Δu) 3. Si misurano l ampiezza e il tempo di risposta del sistema : Δy = ampiezza della risposta τ= ritardo apparente in ingresso T=costante di tempo del processo 4. Si calcola il guadagno statico di processo

18 TARATURA AD ANELLO APERTO 5. Si calcolano i guadagni secondo le formule:

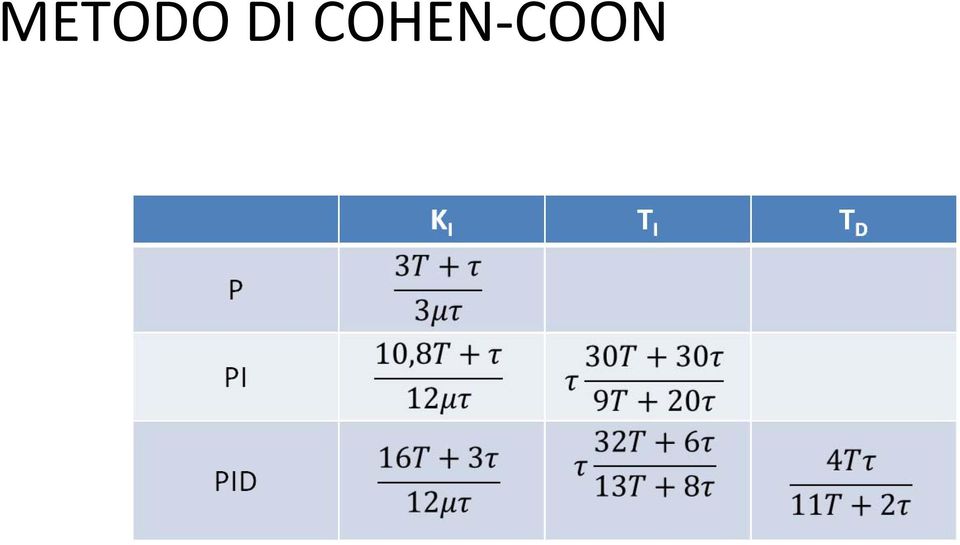
19 METODO DI COHEN COON
20 TARATURA AD ANELLO CHIUSO DETTO ANCHE SECONDO METODO DI ZIEGLER NICHOLS 1. Si chiude l anello inserendo un controllore puramente proporzionale con un basso guadagno K P 2. si aumenta progressivamente il guadagno K P fino a che si innesca una oscillazione regolare permanente 3. Si definisce K U come il valore del guadagno KP tale percui si abbiano delle oscillazioni ad ampiezza costante 4. Si misura il periodo T U dell oscillazione

21 TARATURA AD ANELLO CHIUSO 5. Si calcolano i guadagni secondo le formule:
22 LIMITAZIONE DELL AZIONE DERIVATIVA Abbiamo definito l azione derivativa come : in presenza di un impulso del segnale a gradino, però, l uscita avrebbe un andamento di tipo impulsivo Questa brusca variazione può provocare una saturazione dell attuatore e, in casi estremi, anche il suo danneggiamento Per ovviare a tale problema si esercita l azione derivativa solo sulla variabile controllata e non sull errore:
23 LIMITAZIONE DELL AZIONE DERIVATIVA
24 SISTEMA DI DESATURAZIONE DELL AZIONE INTEGRALE (ANTI WIND UP) Se il sistema èben progettato, a regime la variabile di controllo ut dovrebbe essere ben lontana dal valore di saturazione. Durante i transitori, però, può succedere che ut superi i livelli di saturazione Quando l uscita del controllore u t è saturata l azione integrale continua ad integrare l errore e quindi le richiesta di controllo continua a crescere causando un fenomeno noto come wind up
25 SISTEMA DI DESATURAZIONE DELL AZIONE INTEGRALE (ANTI WIND UP) Per ovviare a tale problema si introduce un sistema di desaturazione dell azione integrale che azzeri il valore dell azione integrale nel caso in cui il valore richiesto superi il valore di saturazione dell attuatore
26 SISTEMA DI DESATURAZIONE DELL AZIONE INTEGRALE (ANTI WIND UP)
27 SISTEMI DI COMMUTAZIONE BUMPLESS In ambito industriale un controllore può essere in ogni momento commutato da funzionamento manuale a funzionamento automatico e viceversa Queste commutazioni devono poter avvenire senza brusche variazioni della variabile di controllo, in gergo si definiscono commutazioni bumpless; in caso contrario si potrebbero avere dei transitori indesiderati che potrebbero anche provocare danni agli attuatori I sistemi bumpless sono sistemi che permettono un passaggio graduale da un valore preimpostato manualmente a quello calcolato dal controllore PID senza brusche variazione nella commutazione In caso di passaggio da automatico a manuale i contributi proporzionale e derivativo vengono momentaneamente annullati per evitare che l errore generato dal gradino tra valore calcolato dal PID e valore inserito manualmente generi una risposta troppo impulsiva del sistema
28 SISTEMI DI COMMUTAZIONE BUMPLESS
Controllori PID, metodi di taratura e problemi d implementazione
 Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Sistemi di controllo industriali
 Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CAPACITÀ DI PROCESSO (PROCESS CAPABILITY)
") CICLO DI LEZIONI per Progetto e Gestione della Qualità Facoltà di Ingegneria CAPACITÀ DI PROCESSO (PROCESS CAPABILITY) Carlo Noè Università Carlo Cattaneo e-mail: cnoe@liuc.it 1 CAPACITÀ DI PROCESSO Il
CICLO DI LEZIONI per Progetto e Gestione della Qualità Facoltà di Ingegneria CAPACITÀ DI PROCESSO (PROCESS CAPABILITY) Carlo Noè Università Carlo Cattaneo e-mail: cnoe@liuc.it 1 CAPACITÀ DI PROCESSO Il
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
L ERRORE A REGIME NELLE CATENE DI REGOLAZIONE E CONTROLLO
 L ERRORE A REGIME NELLE CATENE DI REGOLAZIONE E CONTROLLO Per errore a regime si intende quello rilevato dopo un intervallo sufficientemente lungo dal verificarsi di variazioni del riferimento o da eventuali
L ERRORE A REGIME NELLE CATENE DI REGOLAZIONE E CONTROLLO Per errore a regime si intende quello rilevato dopo un intervallo sufficientemente lungo dal verificarsi di variazioni del riferimento o da eventuali
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Spiegare brevemente il principale beneficio del controllo in cascata (per sistemi a fase non minima).
.") Spiegare brevemente il principale beneficio del controllo in cascata (per sistemi a fase non minima). Il controllo in cascata si usa per migliorare la risposta al setpoint, e soprattutto al disturbo di
Spiegare brevemente il principale beneficio del controllo in cascata (per sistemi a fase non minima). Il controllo in cascata si usa per migliorare la risposta al setpoint, e soprattutto al disturbo di
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Regole della mano destra.
 Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
Regole della mano destra. Macchina in continua con una spira e collettore. Macchina in continua con due spire e collettore. Macchina in continua: schematizzazione di indotto. Macchina in continua. Schematizzazione
LA REGOLAZIONE. Controllore. Feedback
 LA REGOLAZIONE Importantissimo nella strumentazione industriale per l'utilità del suo impiego e per lo sviluppo a cui può dar luogo, è il sistema di controllo automatico (Regolatore Controllore). Questo
LA REGOLAZIONE Importantissimo nella strumentazione industriale per l'utilità del suo impiego e per lo sviluppo a cui può dar luogo, è il sistema di controllo automatico (Regolatore Controllore). Questo
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
LA MACCHINA FRIGORIFERA E LA POMPA DI
 asdf LA MACCHINA FRIGORIFERA E LA POMPA DI CALORE 12 March 2012 Il ciclo di Carnot... "al contrario" Nell'articolo dedicato alla macchina termica, avevamo visto nel finale la macchina di Carnot e il ciclo
asdf LA MACCHINA FRIGORIFERA E LA POMPA DI CALORE 12 March 2012 Il ciclo di Carnot... "al contrario" Nell'articolo dedicato alla macchina termica, avevamo visto nel finale la macchina di Carnot e il ciclo
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
Fondamenti di macchine elettriche Corso SSIS 2006/07
 9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
9.13 Caratteristica meccanica del motore asincrono trifase Essa è un grafico cartesiano che rappresenta l andamento della coppia C sviluppata dal motore in funzione della sua velocità n. La coppia è legata
ARCHITETTURA DI RETE FOLEGNANI ANDREA
 ARCHITETTURA DI RETE FOLEGNANI ANDREA INTRODUZIONE È denominata Architettura di rete un insieme di livelli e protocolli. Le reti sono organizzate gerarchicamente in livelli, ciascuno dei quali interagisce
ARCHITETTURA DI RETE FOLEGNANI ANDREA INTRODUZIONE È denominata Architettura di rete un insieme di livelli e protocolli. Le reti sono organizzate gerarchicamente in livelli, ciascuno dei quali interagisce
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Caratteristiche dinamiche e criteri di messa a punto dei regolatori P.I.D. NOTE TECNICHE 06-02 - 1998. RigaSoft
 aratteristiche dinamiche e criteri di messa a punto dei regolatori P.I.D. NOTE TENIHE 06-02 - 1998 RigaSoft 2 >
aratteristiche dinamiche e criteri di messa a punto dei regolatori P.I.D. NOTE TENIHE 06-02 - 1998 RigaSoft 2 >
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
INTEGRATORE E DERIVATORE REALI
 INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati
 Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
CONVERTITORI DIGITALE/ANALOGICO (DAC)
") CONVERTITORI DIGITALE/ANALOGICO (DAC) Un convertitore digitale/analogico (DAC: digital to analog converter) è un circuito che fornisce in uscita una grandezza analogica proporzionale alla parola di n bit
CONVERTITORI DIGITALE/ANALOGICO (DAC) Un convertitore digitale/analogico (DAC: digital to analog converter) è un circuito che fornisce in uscita una grandezza analogica proporzionale alla parola di n bit
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
IL DIMENSIONAMENTO DEGLI IMPIANTI IDROSANITARI Miscelatori e riduttori di pressione
 FOCUS TECNICO IL DEGLI IMPIANTI IDROSANITARI Miscelatori e riduttori di pressione CRITERI DI CALCOLO DELLA PORTATA DI PROGETTO Lo scopo principale del dimensionamento di una rete idrica è quello di assicurare
FOCUS TECNICO IL DEGLI IMPIANTI IDROSANITARI Miscelatori e riduttori di pressione CRITERI DI CALCOLO DELLA PORTATA DI PROGETTO Lo scopo principale del dimensionamento di una rete idrica è quello di assicurare
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Il fotone. Emanuele Pugliese, Lorenzo Santi URDF Udine
 Il fotone Emanuele Pugliese, Lorenzo Santi URDF Udine Interpretazione di Einstein dell effetto fotoelettrico Esistono «particelle»* di luce: i fotoni! La luce è composta da quantità indivisibili di energia
Il fotone Emanuele Pugliese, Lorenzo Santi URDF Udine Interpretazione di Einstein dell effetto fotoelettrico Esistono «particelle»* di luce: i fotoni! La luce è composta da quantità indivisibili di energia
MESSA IN SCALA DI ALGORITMI DIGITALI
 Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Logica Numerica Approfondimento 1. Minimo Comune Multiplo e Massimo Comun Divisore. Il concetto di multiplo e di divisore. Il Minimo Comune Multiplo
 Logica Numerica Approfondimento E. Barbuto Minimo Comune Multiplo e Massimo Comun Divisore Il concetto di multiplo e di divisore Considerato un numero intero n, se esso viene moltiplicato per un numero
Logica Numerica Approfondimento E. Barbuto Minimo Comune Multiplo e Massimo Comun Divisore Il concetto di multiplo e di divisore Considerato un numero intero n, se esso viene moltiplicato per un numero
Reti sequenziali. Esempio di rete sequenziale: distributore automatico.
 Reti sequenziali 1 Reti sequenziali Nelle RETI COMBINATORIE il valore logico delle variabili di uscita, in un dato istante, è funzione solo dei valori delle variabili di ingresso in quello stesso istante.
Reti sequenziali 1 Reti sequenziali Nelle RETI COMBINATORIE il valore logico delle variabili di uscita, in un dato istante, è funzione solo dei valori delle variabili di ingresso in quello stesso istante.
Il Campionameto dei segnali e la loro rappresentazione. 1 e prende il nome frequenza di
 Il Campionameto dei segnali e la loro rappresentazione Il campionamento consente, partendo da un segnale a tempo continuo ovvero che fluisce con continuità nel tempo, di ottenere un segnale a tempo discreto,
Il Campionameto dei segnali e la loro rappresentazione Il campionamento consente, partendo da un segnale a tempo continuo ovvero che fluisce con continuità nel tempo, di ottenere un segnale a tempo discreto,
2. Leggi finanziarie di capitalizzazione
 2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
2. Leggi finanziarie di capitalizzazione Si chiama legge finanziaria di capitalizzazione una funzione atta a definire il montante M(t accumulato al tempo generico t da un capitale C: M(t = F(C, t C t M
PROCEDURA INVENTARIO DI MAGAZZINO di FINE ESERCIZIO (dalla versione 3.2.0)
") PROCEDURA INVENTARIO DI MAGAZZINO di FINE ESERCIZIO (dalla versione 3.2.0) (Da effettuare non prima del 01/01/2011) Le istruzioni si basano su un azienda che ha circa 1000 articoli, che utilizza l ultimo
PROCEDURA INVENTARIO DI MAGAZZINO di FINE ESERCIZIO (dalla versione 3.2.0) (Da effettuare non prima del 01/01/2011) Le istruzioni si basano su un azienda che ha circa 1000 articoli, che utilizza l ultimo
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
IL FILTRAGGIO DEL SEGNALE
 CAPITOLO 4 IL FILTRAGGIO DEL SEGNALE 4.1 - SISTEMA LINEARE NON DISTORCENTE E un sistema lineare che restituisce in uscita una replica indistorta del segnale di entrata, intendendo x(t) y(t) = Ax(t-t 0
CAPITOLO 4 IL FILTRAGGIO DEL SEGNALE 4.1 - SISTEMA LINEARE NON DISTORCENTE E un sistema lineare che restituisce in uscita una replica indistorta del segnale di entrata, intendendo x(t) y(t) = Ax(t-t 0
ELETTRONICA. L amplificatore Operazionale
 ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
REGOLATORI PID: TECNICHE DI SINTESI E PROBLEMATICHE IMPLEMENTATIVE
 REGOLATORI PID: TECNICHE DI SINTESI E PROBLEMATICHE IMPLEMENTATIVE PID: DESIGN TECHNIQUES AND IMPLEMENTATION ISSUES Relatore: Laureando: Prof.ssa Maria Elena Valcher Davide Meneghel Corso di Laurea in
REGOLATORI PID: TECNICHE DI SINTESI E PROBLEMATICHE IMPLEMENTATIVE PID: DESIGN TECHNIQUES AND IMPLEMENTATION ISSUES Relatore: Laureando: Prof.ssa Maria Elena Valcher Davide Meneghel Corso di Laurea in
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Istituto d Istruzione Secondaria Superiore M.BARTOLO. A cura del Prof S. Giannitto
 Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Circuito di pilotaggio ON OFF con operazionale
 PREMESSA Circuito di pilotaggio ON OFF con operazionale A cura del Prof. Marco Chirizzi www.marcochirizzi.it Si supponga di dovere progettare un circuito di pilotaggio ON OFF in grado di mantenere un fluido
PREMESSA Circuito di pilotaggio ON OFF con operazionale A cura del Prof. Marco Chirizzi www.marcochirizzi.it Si supponga di dovere progettare un circuito di pilotaggio ON OFF in grado di mantenere un fluido
Lezione 16. Motori elettrici: introduzione
 Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
SISTEMI INFORMATIVI AVANZATI -2010/2011 1. Introduzione
 SISTEMI INFORMATIVI AVANZATI -2010/2011 1 Introduzione In queste dispense, dopo aver riportato una sintesi del concetto di Dipendenza Funzionale e di Normalizzazione estratti dal libro Progetto di Basi
SISTEMI INFORMATIVI AVANZATI -2010/2011 1 Introduzione In queste dispense, dopo aver riportato una sintesi del concetto di Dipendenza Funzionale e di Normalizzazione estratti dal libro Progetto di Basi
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Scheduling della CPU. Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux
 Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Proportion-Air, Inc. Controllo della temperatura ad anello chiuso utilizzando la pressione del vapore saturo
 Proportion-Air, Inc. Controllo della temperatura ad anello chiuso utilizzando la pressione del vapore saturo Benefici della regolazione elettronica del vapore ad anello chiuso Vs. valvole a modulazione
Proportion-Air, Inc. Controllo della temperatura ad anello chiuso utilizzando la pressione del vapore saturo Benefici della regolazione elettronica del vapore ad anello chiuso Vs. valvole a modulazione
FUNZIONE. Si scrive: A B f: A B x y=f(x) (si legge: f funzione da A in B) x f y= f(x)
 (si legge: f funzione da A in B) x f y= f(x)") 1 FUNZIONE Dati gli insiemi A e B, si definisce funzione da A in B una relazione o legge o corrispondenza che ad ogni elemento di A associa uno ed un solo elemento di B. Si scrive: A B f: A B f() (si legge:
1 FUNZIONE Dati gli insiemi A e B, si definisce funzione da A in B una relazione o legge o corrispondenza che ad ogni elemento di A associa uno ed un solo elemento di B. Si scrive: A B f: A B f() (si legge:
MISURE CON L OSCILLOSCOPIO
 MISURE CON L OSCILLOSCOPIO Misure di ampiezza (1/4) Per effettuare misure di ampiezza con l oscilloscopio l di norma si eseguono in sequenza i seguenti passi: 1. Si procede innanzitutto alla predisposizione
MISURE CON L OSCILLOSCOPIO Misure di ampiezza (1/4) Per effettuare misure di ampiezza con l oscilloscopio l di norma si eseguono in sequenza i seguenti passi: 1. Si procede innanzitutto alla predisposizione
Matematica Computazionale Lezione 4: Algebra di Commutazione e Reti Logiche
 Matematica Computazionale Lezione 4: Algebra di Commutazione e Reti Logiche Docente: Michele Nappi mnappi@unisa.it www.dmi.unisa.it/people/nappi 089-963334 ALGEBRA DI COMMUTAZIONE Lo scopo di questa algebra
Matematica Computazionale Lezione 4: Algebra di Commutazione e Reti Logiche Docente: Michele Nappi mnappi@unisa.it www.dmi.unisa.it/people/nappi 089-963334 ALGEBRA DI COMMUTAZIONE Lo scopo di questa algebra
Analisi dei sistemi di controllo a segnali campionati
 Analisi dei sistemi di controllo a segnali campionati Sistemi di controllo (già analizzati) Tempo continuo (trasformata di Laplace / analisi in frequenza) C(s) controllore analogico impianto attuatori
Analisi dei sistemi di controllo a segnali campionati Sistemi di controllo (già analizzati) Tempo continuo (trasformata di Laplace / analisi in frequenza) C(s) controllore analogico impianto attuatori
CONTROLLORI STANDARD PID. Guido Vagliasindi Controlli Automatici A.A. 06/07 Controllori Standard PID
 ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10. Angelo Bonomi
 GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10 Angelo Bonomi CONSIDERAZIONI SUL MONITORAGGIO Un monitoraggio ottimale dipende dalle considerazioni seguenti:
GESTIONE DELLE TECNOLOGIE AMBIENTALI PER SCARICHI INDUSTRIALI ED EMISSIONI NOCIVE LEZIONE 10 Angelo Bonomi CONSIDERAZIONI SUL MONITORAGGIO Un monitoraggio ottimale dipende dalle considerazioni seguenti:
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
analisi di sistemi retroazionati (2)
") : analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano lovera@elet.polimi.it Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
: analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano lovera@elet.polimi.it Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
9. Urti e conservazione della quantità di moto.
 9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
Slide Cerbara parte1 5. Le distribuzioni teoriche
 Slide Cerbara parte1 5 Le distribuzioni teoriche I fenomeni biologici, demografici, sociali ed economici, che sono il principale oggetto della statistica, non sono retti da leggi matematiche. Però dalle
Slide Cerbara parte1 5 Le distribuzioni teoriche I fenomeni biologici, demografici, sociali ed economici, che sono il principale oggetto della statistica, non sono retti da leggi matematiche. Però dalle
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTROLLO di un MOTORE ELETTRICO a CORRENTE CONTINUA
 E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTOLLO di un MOTOE ELETTICO a COENTE CONTINUA 1. EQUAZIONI DEL MODELLO Equazioni nel dominio del tempo descrittive del Modello elettromagnetico
E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTOLLO di un MOTOE ELETTICO a COENTE CONTINUA 1. EQUAZIONI DEL MODELLO Equazioni nel dominio del tempo descrittive del Modello elettromagnetico
PROBABILITÀ - SCHEDA N. 2 LE VARIABILI ALEATORIE
 Matematica e statistica: dai dati ai modelli alle scelte www.dima.unige/pls_statistica Responsabili scientifici M.P. Rogantin e E. Sasso (Dipartimento di Matematica Università di Genova) PROBABILITÀ -
Matematica e statistica: dai dati ai modelli alle scelte www.dima.unige/pls_statistica Responsabili scientifici M.P. Rogantin e E. Sasso (Dipartimento di Matematica Università di Genova) PROBABILITÀ -
DERIVATI REGOLAMENTATI OPZIONI E FUTURES ORARIO DI NEGOZIAZIONE : 9,00 17,40
 DERIVATI REGOLAMENTATI OPZIONI E FUTURES ORARIO DI NEGOZIAZIONE : 9,00 17,40 LE OPZIONI - Definizione Le opzioni sono contratti finanziari che danno al compratore il diritto, ma non il dovere, di comprare,
DERIVATI REGOLAMENTATI OPZIONI E FUTURES ORARIO DI NEGOZIAZIONE : 9,00 17,40 LE OPZIONI - Definizione Le opzioni sono contratti finanziari che danno al compratore il diritto, ma non il dovere, di comprare,
Tesina di Identificazione dei Modelli e Analisi dei Dati
 Tesina di Identificazione dei Modelli e Analisi dei Dati Ceccarelli Egidio e Papi Alessio 19 Luglio 2000 1 Indice 1 Introduzione 3 2 Valutazioni relative all identificazione 3 3 Prove 4 4 Conclusioni 5
Tesina di Identificazione dei Modelli e Analisi dei Dati Ceccarelli Egidio e Papi Alessio 19 Luglio 2000 1 Indice 1 Introduzione 3 2 Valutazioni relative all identificazione 3 3 Prove 4 4 Conclusioni 5
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Analisi di scenario File Nr. 10
 1 Analisi di scenario File Nr. 10 Giorgio Calcagnini Università di Urbino Dip. Economia, Società, Politica giorgio.calcagnini@uniurb.it http://www.econ.uniurb.it/calcagnini/ http://www.econ.uniurb.it/calcagnini/forecasting.html
1 Analisi di scenario File Nr. 10 Giorgio Calcagnini Università di Urbino Dip. Economia, Società, Politica giorgio.calcagnini@uniurb.it http://www.econ.uniurb.it/calcagnini/ http://www.econ.uniurb.it/calcagnini/forecasting.html
Electrical motor Test-bed
 EM_Test_bed Page 1 of 10 Electrical motor Test-bed 1. INTERFACCIA SIMULINK... 2 1.1. GUI CRUSCOTTO BANCO MOTORE... 2 1.2. GUIDE... 3 1.3. GUI PARAMETRI MOTORE... 3 1.4. GUI VISUALIZZAZIONE MODELLO 3D MOTORE...
EM_Test_bed Page 1 of 10 Electrical motor Test-bed 1. INTERFACCIA SIMULINK... 2 1.1. GUI CRUSCOTTO BANCO MOTORE... 2 1.2. GUIDE... 3 1.3. GUI PARAMETRI MOTORE... 3 1.4. GUI VISUALIZZAZIONE MODELLO 3D MOTORE...
(Uninterruptible Power Supply, UPS hanno bisogno di una continuità di alimentazione con un certo ritardo
 I gruppi di continuità (Uninterruptible Power Supply, UPS) vengono utilizzati per alimentare utenze che hanno bisogno di una continuità di alimentazione, cioè quelle utenze che devono essere alimentate
I gruppi di continuità (Uninterruptible Power Supply, UPS) vengono utilizzati per alimentare utenze che hanno bisogno di una continuità di alimentazione, cioè quelle utenze che devono essere alimentate
Corso Tecnologie dei Sistemi di Controllo. Tecniche di taratura di un PID
 Corso Tecniche di taratura di un PID Ing. Valerio Scordamaglia Università Mediterranea di Reggio Calabria, Loc. Feo di Vito, 89060, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica
Corso Tecniche di taratura di un PID Ing. Valerio Scordamaglia Università Mediterranea di Reggio Calabria, Loc. Feo di Vito, 89060, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica
Integrated Comfort SyStemS
 Integrated Comfort Systems EST (Energy Saving Technology) è una tecnologia applicata ai ventilconvettori e cassette EURAPO che consente di ottenere assorbimenti elettrici estremamente contenuti e una modulazione
Integrated Comfort Systems EST (Energy Saving Technology) è una tecnologia applicata ai ventilconvettori e cassette EURAPO che consente di ottenere assorbimenti elettrici estremamente contenuti e una modulazione
L IDENTIFICAZIONE STRUTTURALE
 e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
e L IDENTIFICAZIONE STRUTTURALE I problemi legati alla manutenzione e all adeguamento del patrimonio edilizio d interesse storico ed artistico sono da alcuni anni oggetto di crescente interesse e studio.
Corrispondenze e funzioni
 Corrispondenze e funzioni L attività fondamentale della mente umana consiste nello stabilire corrispondenze e relazioni tra oggetti; è anche per questo motivo che il concetto di corrispondenza è uno dei
Corrispondenze e funzioni L attività fondamentale della mente umana consiste nello stabilire corrispondenze e relazioni tra oggetti; è anche per questo motivo che il concetto di corrispondenza è uno dei
1. Scopo dell esperienza.
 1. Scopo dell esperienza. Lo scopo di questa esperienza è ricavare la misura di tre resistenze il 4 cui ordine di grandezza varia tra i 10 e 10 Ohm utilizzando il metodo olt- Amperometrico. Tale misura
1. Scopo dell esperienza. Lo scopo di questa esperienza è ricavare la misura di tre resistenze il 4 cui ordine di grandezza varia tra i 10 e 10 Ohm utilizzando il metodo olt- Amperometrico. Tale misura
Termodinamica: legge zero e temperatura
 Termodinamica: legge zero e temperatura Affrontiamo ora lo studio della termodinamica che prende in esame l analisi dell energia termica dei sistemi e di come tale energia possa essere scambiata, assorbita
Termodinamica: legge zero e temperatura Affrontiamo ora lo studio della termodinamica che prende in esame l analisi dell energia termica dei sistemi e di come tale energia possa essere scambiata, assorbita
Basi di matematica per il corso di micro
 Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
C(f) : funzione di trasferimento del canale. Essa limita la banda del segnale trasmesso e quindi rappresenta un modello più realistico
 : funzione di trasferimento del canale. Essa limita la banda del segnale trasmesso e quindi rappresenta un modello più realistico") MODELLO DEL CANALE Modello gaussiano additivo a banda illimitata (considerato finora): s(t) + n(t) r(t) = s(t) + n(t) s(t) Canale C(f) + r(t) n(t) C(f) : funzione di trasferimento del canale. Essa limita
MODELLO DEL CANALE Modello gaussiano additivo a banda illimitata (considerato finora): s(t) + n(t) r(t) = s(t) + n(t) s(t) Canale C(f) + r(t) n(t) C(f) : funzione di trasferimento del canale. Essa limita
CORSO di AUTOMAZIONE INDUSTRIALE
 CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
Test per determinare la capacità di regolazione secondaria
 Pagina 1 di 5 Test per determinare la capacità di regolazione secondaria Autori: Dominik Schlipf, Marc Scherer, Matthias Haller Rielaborazioni: Versione Data Sezione 1.0 20.10.2008 Documento finalizzato
Pagina 1 di 5 Test per determinare la capacità di regolazione secondaria Autori: Dominik Schlipf, Marc Scherer, Matthias Haller Rielaborazioni: Versione Data Sezione 1.0 20.10.2008 Documento finalizzato
LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante
 z + p / γ = costante") IDRAULICA LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante 2 LEGGE DI STEVIN Z = ALTEZZA GEODETICA ENERGIA POTENZIALE PER UNITA DI PESO p /
IDRAULICA LEGGE DI STEVIN (EQUAZIONE FONDAMENTALE DELLA STATICA DEI FLUIDI PESANTI INCOMPRIMIBILI) z + p / γ = costante 2 LEGGE DI STEVIN Z = ALTEZZA GEODETICA ENERGIA POTENZIALE PER UNITA DI PESO p /
f(x) = 1 x. Il dominio di questa funzione è il sottoinsieme proprio di R dato da
 = 1 x. Il dominio di questa funzione è il sottoinsieme proprio di R dato da") Data una funzione reale f di variabile reale x, definita su un sottoinsieme proprio D f di R (con questo voglio dire che il dominio di f è un sottoinsieme di R che non coincide con tutto R), ci si chiede
Data una funzione reale f di variabile reale x, definita su un sottoinsieme proprio D f di R (con questo voglio dire che il dominio di f è un sottoinsieme di R che non coincide con tutto R), ci si chiede
6 Cenni sulla dinamica dei motori in corrente continua
 6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
SPC e distribuzione normale con Access
 SPC e distribuzione normale con Access In questo articolo esamineremo una applicazione Access per il calcolo e la rappresentazione grafica della distribuzione normale, collegata con tabelle di Clienti,
SPC e distribuzione normale con Access In questo articolo esamineremo una applicazione Access per il calcolo e la rappresentazione grafica della distribuzione normale, collegata con tabelle di Clienti,
E possibile classificazione i trasduttori in base a diversi criteri, ad esempio: Criterio Trasduttori Caratteristiche
 PREMESSA In questa lezione verranno illustrate la classificazione delle diverse tipologie di trasduttori utilizzati nei sistemi di controllo industriali ed i loro parametri caratteristici. CLASSIFICAZIONE
PREMESSA In questa lezione verranno illustrate la classificazione delle diverse tipologie di trasduttori utilizzati nei sistemi di controllo industriali ed i loro parametri caratteristici. CLASSIFICAZIONE
della funzione obiettivo. Questo punto dovrebbe risultare chiaro se consideriamo una generica funzione:
 Corso di laurea in Economia e finanza CLEF) Economia pubblica ************************************************************************************ Una nota elementare sulla ottimizzazione in presenza di
Corso di laurea in Economia e finanza CLEF) Economia pubblica ************************************************************************************ Una nota elementare sulla ottimizzazione in presenza di
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Mon Ami 3000 Conto Lavoro Gestione del C/Lavoro attivo e passivo
 Prerequisiti Mon Ami 3000 Conto Lavoro Gestione del C/Lavoro attivo e passivo L opzione Conto lavoro è disponibile per le versioni Azienda Light e Azienda Pro. Introduzione L opzione Conto lavoro permette
Prerequisiti Mon Ami 3000 Conto Lavoro Gestione del C/Lavoro attivo e passivo L opzione Conto lavoro è disponibile per le versioni Azienda Light e Azienda Pro. Introduzione L opzione Conto lavoro permette