Programmazione KR16. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
|
|
|
- Fortunato Biondi
- 6 anni fa
- Visualizzazioni
Transcript
1 Programmazione KR16 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo



2 Kuka KR C2 : Controllore comandi posizioni & velocità corrente dati 2

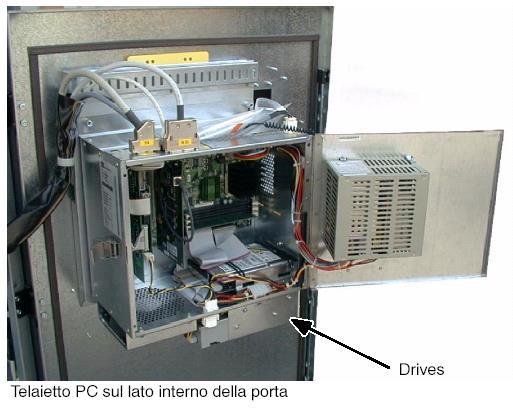
3 Kuka KRC2 : Unità di potenza Calcolatore 3
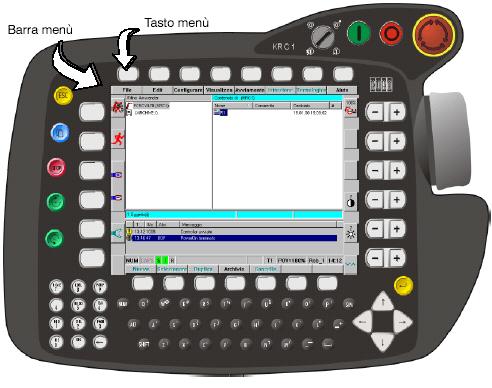
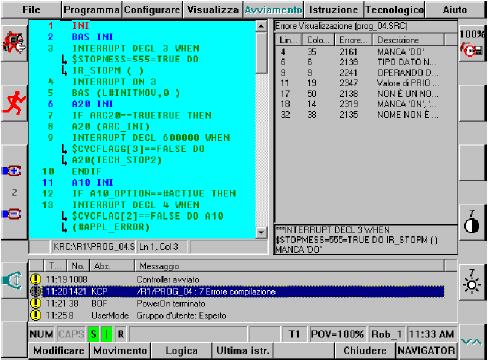
4 KCP : Programmazione 4


5 On-line programming Advantages Cheap Easily accessible Programs made in concordance with the actual position of equipment and pieces 5
6 On-line programming Disadvantages Suspension of production while programming. Slow movement of the robot while programming. Program logic and calculations are hard to program. Poorly documented 6
7 On-line programming Process Programming time Process time Ratio Welding (complex) min (20 days) 20 min 480 Welding (simpel) 40 min 1 min 40 Bending 480 min (8 hours) 5 min 96 7


8 Off-line programming Takes place on a computer without use of the physical robot Uses models of the work cell with robot, work pieces, process and surrounding. From the EU-projectet FlexPaint: From : 8
9 Off-line programming Advantages: Production can continue while programming. Effective programming of program logics. Effective programming of locations. Verification of program through simulation and visualization. Well documented through simulation model. Reuse of existing CAD data. Disadvantages Often expensive off-line programming system. Models are needed Takes time to learn 9

10 Off-line examples 10



11 Many different products RobCad/WorkPlace IGRIP/Ultra Arc WorkSpace RobotStudio RoboPlan Camelot Thor 11
12 Hybrid programming: Combines on and off-line e.g: Offline: Program logics Simulation major part of movement commands (reuse of CAD data). On-line: Movements near the workpiece Process data 12


13 KCP : Sistema di Coordinate 13



14 KCP : Sistema di Coordinate 14

15 KCP : Sistema di Coordinate 15
16 I movimenti Permettono di raggiungere un punto finale, seguendo traiettorie diverse. Movimenti possibili: movimenti punto a punto movimenti lineari movimenti circolari 16
17 Movimenti punto a punto In un movimento punto a punto Tutti gli assi si muovono contemporaneamente Percorso determinato dal controllore Necessità di impostare velocità e accelerazioni per ogni asse 17
18 Movimenti da punto a punto La traiettoria seguita dal robot non è definita a priori Definizione della traiettoria tra due punti: 1. Punto attuale 2. Punto finale 18
19 Movimenti lineari In un movimento lineare: Movimenti dei singoli assi coordinati per seguire una traiettoria lineare Velocità e accelerazione riferite al movimento lungo la traiettoria La velocità indicata è la massima raggiungibile percorrendo la traiettoria 19
20 Movimenti lineari La traiettoria da seguire è costituita da una linea retta Definizione della retta tramite due punti: 1. Punto attuale 2. Punto finale 20

21 Movimenti lineari: orientamento Orientamento fisso Orientamento variabile 21
22 Movimenti circolari Nei movimenti circolari: Movimenti dei singoli assi coordinati per seguire una traiettoria circolare Velocità e accelerazione riferite al movimento lungo la traiettoria La velocità indicata è la massima raggiungibile percorrendo la traiettoria 22
23 Movimenti circolari La traiettoria da seguire è costituita da un arco di circonferenza Definizione della circonferenza: 1. Punto attuale 2. Punto finale 3. Punto ausiliario 23

24 Comandi di movimento 24
25 Configurazione iniziale : A3 = 90 25
26 26
27 27
28 28
29 29
30 Movimenti lineari 30
31 Movimenti circolari 31
32 Movimenti approssimati 32
33 Esempio per approssimazione PTP-PTP 33
34 Esempio per approssimazione LIN--LIN 34
35 Esempio per approssimazione CIRC-CIRC 35

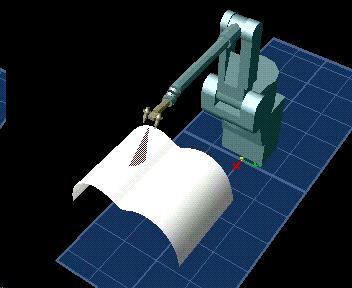
36 Progetto Technix Test del braccio telescopico: 36
37 Progetto Technix Obiettivi del test: MOVIMENTO ORIZZONTALE Simulare l utilizzo prolungato dello strumento lungo le tre direzioni L, A e N MOVIMENTO VERTICALE Dispositivo a raggi X L MOVIMENTO DI ROTAZIONE N gradi A Organizzare i tre movimenti in successione per realizzare un ciclo da ripetere X volte 37
38 Progetto Technix Progettazione di un nuovo tool per realizzare l accoppiamento tra robot e dispositivo a raggi X flangia del robot dispositivo ai raggi X giuntura sferica 27 cm 38


39 Progetto Technix Progettazione di un nuovo tool per realizzare l accoppiamento tra robot e dispositivo a raggi X 39
40 Progetto Technix Movimento VERTICALE Movimento CIRCOLARE Movimento ORIZZONTALE z 740 y z x x y Sistema di riferimento World


41 Progetto Technix 41
Università. Cassino. Università. Cassino
 Modalità di programmazione On-line programming skill down-time accurate Off-line programming skill (OLP) graphic tools less down-time less accurate M. Strano, La programmazione, Lez. 8 p.1 Modalità di
Modalità di programmazione On-line programming skill down-time accurate Off-line programming skill (OLP) graphic tools less down-time less accurate M. Strano, La programmazione, Lez. 8 p.1 Modalità di
Meccanica dei Manipolatori. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Fondamenti per la Programmazione delle Macchine a Controllo Numerico
 Fondamenti per la Programmazione delle Macchine a Controllo Numerico Sistemi di Coordinate I sistemi di coordinate, permettono al programmatore di definire i punti caratteristici del profilo da lavorare.
Fondamenti per la Programmazione delle Macchine a Controllo Numerico Sistemi di Coordinate I sistemi di coordinate, permettono al programmatore di definire i punti caratteristici del profilo da lavorare.
LINGUAGGIO PDL2. Caratteristiche del linguaggio PDL2. Struttura del programma. Rappresentazione dei dati. Istruzioni. Gestori di condizione
 LINGUAGGIO PDL2 Caratteristiche del linguaggio PDL2 Struttura del programma Rappresentazione dei dati Istruzioni Gestori di condizione Ambiente di programmazione CARATTERISTICHE DEL LINGUAGGIO PDL2 Orientato
LINGUAGGIO PDL2 Caratteristiche del linguaggio PDL2 Struttura del programma Rappresentazione dei dati Istruzioni Gestori di condizione Ambiente di programmazione CARATTERISTICHE DEL LINGUAGGIO PDL2 Orientato
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Simulazione del moto di un punto materiale soggetto a una forza
 Simulazione del moto di un punto materiale soggetto a una forza Università degli Studi di Brescia Elementi di Informatica e Programmazione Università di Brescia 1 SCOPO DELLA SIMULAZIONE Punto materiale:
Simulazione del moto di un punto materiale soggetto a una forza Università degli Studi di Brescia Elementi di Informatica e Programmazione Università di Brescia 1 SCOPO DELLA SIMULAZIONE Punto materiale:
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
TECNOROBOT. Official Integrator FANUC Robotics A NEW DIMENSION IN INDUSTRIAL ROBOTICS
 TECNOROBOT Official Integrator FANUC Robotics A NEW DIMENSION IN INDUSTRIAL ROBOTICS 2 la società / the company Tecnorobot è una moderna società attiva dal 1993, nella ricerca, sviluppo, produzione e vendita
TECNOROBOT Official Integrator FANUC Robotics A NEW DIMENSION IN INDUSTRIAL ROBOTICS 2 la società / the company Tecnorobot è una moderna società attiva dal 1993, nella ricerca, sviluppo, produzione e vendita
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
CONTROLLO NUMERICO. CorsodiSistemi integratidiproduzionea.a Prof. G. A. Berti
 CONTROLLO NUMERICO CorsodiSistemi integratidiproduzionea.a.2004-05 Prof. G. A. Berti CLASSIFICAZIONE delle MACCHINE a CN 1. Controllo del movimento: punto a punto (PTP), parassiale e continuo (Contornatura)
CONTROLLO NUMERICO CorsodiSistemi integratidiproduzionea.a.2004-05 Prof. G. A. Berti CLASSIFICAZIONE delle MACCHINE a CN 1. Controllo del movimento: punto a punto (PTP), parassiale e continuo (Contornatura)
the creative point of view www.geomaticscube.com
 the creative point of view www.geomaticscube.com side B THE CREATIVE approach 03 Another point of view 04/05 Welcome to the unbelievable world 06/07 Interact easily with complexity 08/09 Create brand-new
the creative point of view www.geomaticscube.com side B THE CREATIVE approach 03 Another point of view 04/05 Welcome to the unbelievable world 06/07 Interact easily with complexity 08/09 Create brand-new
PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC
 PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC A cura di Massimo Reboldi La programmazione EIA/ISO! Introduzione! Assi e Riferimenti! Linguaggio di programmazione! Grammatica;! Lessico;! Funzioni N, G, M,
PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC A cura di Massimo Reboldi La programmazione EIA/ISO! Introduzione! Assi e Riferimenti! Linguaggio di programmazione! Grammatica;! Lessico;! Funzioni N, G, M,
ESPERIMENTI SUL COMPORTAMENTO DEI RAGGI CATODICI IN UN CAMPO ELETTRICO E IN UN CAMPO MAGNETICO MEDIANTE IL TUBO DI DEFLESSIONE
 ESPERIMENTI SUL COMPORTAMENTO DEI RAGGI CATODICI IN UN CAMPO ELETTRICO E IN UN CAMPO MAGNETICO MEDIANTE IL TUBO DI DEFLESSIONE ATTENZIONE: PERICOLO! In questa esperienza si impiegano altissime tensioni
ESPERIMENTI SUL COMPORTAMENTO DEI RAGGI CATODICI IN UN CAMPO ELETTRICO E IN UN CAMPO MAGNETICO MEDIANTE IL TUBO DI DEFLESSIONE ATTENZIONE: PERICOLO! In questa esperienza si impiegano altissime tensioni
Moto del Punto - Cinematica del Punto
 Moto del Punto - Cinematica del Punto Quiz 1 Posizione, spostamento e traiettoria 1. Un ciclista si sposta di 10km in una direzione formante un angolo di 30 rispetto all asse x di un fissato riferimento.
Moto del Punto - Cinematica del Punto Quiz 1 Posizione, spostamento e traiettoria 1. Un ciclista si sposta di 10km in una direzione formante un angolo di 30 rispetto all asse x di un fissato riferimento.
I MOTI NEL PIANO. Vettore posizione e vettore spostamento
 I MOTI NEL IANO Vettore posizione e vettore spostamento Si parla di moto in un piano quando lo spostamento non avviene lungo una retta, ma in un piano, e può essere descritto usando un sistema di riferimento
I MOTI NEL IANO Vettore posizione e vettore spostamento Si parla di moto in un piano quando lo spostamento non avviene lungo una retta, ma in un piano, e può essere descritto usando un sistema di riferimento
RoboWave hyprogram Descrizione Prodotto
 Versione: 1.0 Ultimo aggiornamento: Luglio 2014 RoboWave hyprogram Descrizione Prodotto I. LA PROGRAMMAZIONE IBRIDA 8 II. CARATTERISTICHE E FUNZIONALITÀ TECNICHE 10 II. STRUTTURA ED AMBIENTI DEL PRODOTTO
Versione: 1.0 Ultimo aggiornamento: Luglio 2014 RoboWave hyprogram Descrizione Prodotto I. LA PROGRAMMAZIONE IBRIDA 8 II. CARATTERISTICHE E FUNZIONALITÀ TECNICHE 10 II. STRUTTURA ED AMBIENTI DEL PRODOTTO
Grandezze angolari. Lineare Angolare Relazione x θ x = rθ. m I I = mr 2 F N N = rf sin θ 1 2 mv2 1
 Grandezze angolari Lineare Angolare Relazione x θ x = rθ v ω v = ωr a α a = αr m I I = mr 2 F N N = rf sin θ 1 2 mv2 1 2 Iω 2 Energia cinetica In forma vettoriale: v = ω r questa collega la velocità angolare
Grandezze angolari Lineare Angolare Relazione x θ x = rθ v ω v = ωr a α a = αr m I I = mr 2 F N N = rf sin θ 1 2 mv2 1 2 Iω 2 Energia cinetica In forma vettoriale: v = ω r questa collega la velocità angolare
Coordinate e Sistemi di Riferimento
 Coordinate e Sistemi di Riferimento Sistemi di riferimento Quando vogliamo approcciare un problema per risolverlo quantitativamente, dobbiamo per prima cosa stabilire in che sistema di riferimento vogliamo
Coordinate e Sistemi di Riferimento Sistemi di riferimento Quando vogliamo approcciare un problema per risolverlo quantitativamente, dobbiamo per prima cosa stabilire in che sistema di riferimento vogliamo
Progetto e Realizzazione di un Robot a Cinematica Parallela per Applicazioni Mediche
 Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Prova scritta del corso di Fisica con soluzioni. Prof. F. Ricci-Tersenghi 14/11/2014
 Prova scritta del corso di Fisica con soluzioni Prof. F. icci-tersenghi 14/11/214 Quesiti 1. Si deve trascinare una cassa di massa m = 25 kg, tirandola con una fune e facendola scorrere su un piano scabro
Prova scritta del corso di Fisica con soluzioni Prof. F. icci-tersenghi 14/11/214 Quesiti 1. Si deve trascinare una cassa di massa m = 25 kg, tirandola con una fune e facendola scorrere su un piano scabro
Analisi di stabilita di un pendio naturale
 Università degli Studi di Napoli FEDERICO II Dipartimento di Ingegneria Idraulica, Geotecnica ed Ambientale (DIGA) Corso di perfezionamento - Gestione e mitigazione dei rischi naturali Analisi di stabilita
Università degli Studi di Napoli FEDERICO II Dipartimento di Ingegneria Idraulica, Geotecnica ed Ambientale (DIGA) Corso di perfezionamento - Gestione e mitigazione dei rischi naturali Analisi di stabilita
Osservatorio di Bassano Bresciano Manuale TCS2009
 Pag.1/10 1 TCS2009 revisione 2.1... 2 1.1 Attività generali... 2 1.2 La console... 3 1.3 La pagina principale... 4 1.4 Pagina di puntamento... 5 1.5 Pagina di allineamento... 6 1.6 Pagina di monitor motori...
Pag.1/10 1 TCS2009 revisione 2.1... 2 1.1 Attività generali... 2 1.2 La console... 3 1.3 La pagina principale... 4 1.4 Pagina di puntamento... 5 1.5 Pagina di allineamento... 6 1.6 Pagina di monitor motori...
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Problema ( ) = 0,!
 = 0,!") Domanda. Problema ( = sen! x ( è! Poiché la funzione seno è periodica di periodo π, il periodo di g x! = 4. Studio di f. La funzione è pari, quindi il grafico è simmetrico rispetto all asse y. È sufficiente
Domanda. Problema ( = sen! x ( è! Poiché la funzione seno è periodica di periodo π, il periodo di g x! = 4. Studio di f. La funzione è pari, quindi il grafico è simmetrico rispetto all asse y. È sufficiente
Proposta di un protocollo innovativo di collaudo per macchine utensili speciali
 Laboratorio per l innovazione Proposta di un protocollo innovativo di collaudo per macchine utensili speciali www.musp.it STATO DELL ARTE Il prof. Georg Schlesinger nel 1927 pubblica il suo famoso documento
Laboratorio per l innovazione Proposta di un protocollo innovativo di collaudo per macchine utensili speciali www.musp.it STATO DELL ARTE Il prof. Georg Schlesinger nel 1927 pubblica il suo famoso documento
Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento
 Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento Antonio Marra - Schneider Electric Esempio Applicativo: Vertical
Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento Antonio Marra - Schneider Electric Esempio Applicativo: Vertical
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico
 Problemi da risolvere navigazione trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico copertura passare un sensore o un attuatore su tutti i punti che
Problemi da risolvere navigazione trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico copertura passare un sensore o un attuatore su tutti i punti che
Manipolatore SH75 Sali-Scendi-Ruota. Tecnologia entusiasmante
 Manipolatore SH75 Sali-Scendi-Ruota Tecnologia entusiasmante Tecnologia entusiasmante Veloce, flessibile e conveniente e molto di più! Semplicità D uso / tempi rapidi di messa in funzione Costruzione compatta
Manipolatore SH75 Sali-Scendi-Ruota Tecnologia entusiasmante Tecnologia entusiasmante Veloce, flessibile e conveniente e molto di più! Semplicità D uso / tempi rapidi di messa in funzione Costruzione compatta
La sfera celeste. Coordinate locali altazimutali Coordinate universali equatoriali
 La sfera celeste Coordinate locali altazimutali Coordinate universali equatoriali Volta celeste Volta parte della sfera visibile al di sopra dell orizzonte celeste (intersezione del piano tangente all
La sfera celeste Coordinate locali altazimutali Coordinate universali equatoriali Volta celeste Volta parte della sfera visibile al di sopra dell orizzonte celeste (intersezione del piano tangente all
MecSoft Corporation Sky Park Circle, Suite KL, Irvine, CA (949) (949) (FAX)
 (949) (FAX)") MecSoft Corporation 18019 Sky Park Circle, Suite KL, Irvine, CA 92614 (949)-654-8163 (949)-654-8164 (FAX) Check list per il supporto a 4 assi e 5 assi Macchine Utensili Macchine Utensile 4-axis I tipi
MecSoft Corporation 18019 Sky Park Circle, Suite KL, Irvine, CA 92614 (949)-654-8163 (949)-654-8164 (FAX) Check list per il supporto a 4 assi e 5 assi Macchine Utensili Macchine Utensile 4-axis I tipi
Anno Accademico 2008/2009. Biomeccanica II. Anno Accademico 2008/2009. Lez. BM1. Natura dell intervento didattico (segue)
") Biomeccanica II Lez. BM1 Anno Accademico 2008/2009 1 Anno comune: Biomeccanica (Prof. Paola Zamparo), le basi della biomeccanica. Anno Accademico 2008/2009 2 Anno curriculum scientifico: Biomeccanica II,
Biomeccanica II Lez. BM1 Anno Accademico 2008/2009 1 Anno comune: Biomeccanica (Prof. Paola Zamparo), le basi della biomeccanica. Anno Accademico 2008/2009 2 Anno curriculum scientifico: Biomeccanica II,
AUTOMAZIONE AUTOMATION
 AUTOMAZIONE AUTOMATION 2 PROCESSI DI SALDATURA M.I.G. M.A.G. T.I.G. T.I.G. con filo PLASMA SALDATURA con o senza filo PLASMA taglio ARCO SOMMERSO AZIENDA DA SEMPRE STILL FACTORY Proiettata nel futuro Pronta
AUTOMAZIONE AUTOMATION 2 PROCESSI DI SALDATURA M.I.G. M.A.G. T.I.G. T.I.G. con filo PLASMA SALDATURA con o senza filo PLASMA taglio ARCO SOMMERSO AZIENDA DA SEMPRE STILL FACTORY Proiettata nel futuro Pronta
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 5
 Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
L innovazione dei sistemi di produzione: principi generali e casi studio. Manufacturing Technology Group
 Verso la fabbrica intelligente Udine, 27 novembre 2014 L innovazione dei sistemi di produzione: principi generali e casi studio Dr. Ing. Marco Sortino Università degli Studi di Udine 1 Manufacturing Technology
Verso la fabbrica intelligente Udine, 27 novembre 2014 L innovazione dei sistemi di produzione: principi generali e casi studio Dr. Ing. Marco Sortino Università degli Studi di Udine 1 Manufacturing Technology
L illuminazione della Terra
 L illuminazione della Terra I moti della Terra nello spazio Sole Mercurio Venere Terra La Terra e gli altri pianeti orbitano intorno al Sole, che è una stella con un raggio di circa 700 000 km e dista
L illuminazione della Terra I moti della Terra nello spazio Sole Mercurio Venere Terra La Terra e gli altri pianeti orbitano intorno al Sole, che è una stella con un raggio di circa 700 000 km e dista
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta
 - a.a. 2013/14 A. Teta") Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta 1. (1/10 Lu.) Generalità sugli insiemi, operazioni di unione, intersezione e prodotto cartesiano. Insiemi numerici: naturali,
Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta 1. (1/10 Lu.) Generalità sugli insiemi, operazioni di unione, intersezione e prodotto cartesiano. Insiemi numerici: naturali,
Rampa elicoidale. Ver 1 del 06/07/16
 Rampa elicoidale Ver 1 del 06/07/16 CAMPO DI APPLICAZIONE La macroistruzione esegue la contornatura in rampa elicoidale di diametri interni/esterni o per la spianatura di flange circolari. Grazie alla
Rampa elicoidale Ver 1 del 06/07/16 CAMPO DI APPLICAZIONE La macroistruzione esegue la contornatura in rampa elicoidale di diametri interni/esterni o per la spianatura di flange circolari. Grazie alla
MOTO CIRCOLARE VARIO
 MOTO ARMONICO E MOTO VARIO PROF. DANIELE COPPOLA Indice 1 IL MOTO ARMONICO ------------------------------------------------------------------------------------------------------ 3 1.1 LA LEGGE DEL MOTO
MOTO ARMONICO E MOTO VARIO PROF. DANIELE COPPOLA Indice 1 IL MOTO ARMONICO ------------------------------------------------------------------------------------------------------ 3 1.1 LA LEGGE DEL MOTO
SISTEMA DI ILLUMINAZIONE PER VERRICELLI WINDLASS LIGHTING SYSTEM
 Istruzioni per l uso Instructions for use SISTEMA DI ILLUMINAZIONE PER VERRICELLI WINDLASS LIGHTING SYSTEM WLS WINDLASS LIGHTING SYSTEM - 1 - Rev.01-2013 Italiano SISTEMA DI ILLUMINAZIONE PER VERRICELLI
Istruzioni per l uso Instructions for use SISTEMA DI ILLUMINAZIONE PER VERRICELLI WINDLASS LIGHTING SYSTEM WLS WINDLASS LIGHTING SYSTEM - 1 - Rev.01-2013 Italiano SISTEMA DI ILLUMINAZIONE PER VERRICELLI
ROBOT CARTESIANI. Abbiamo 9 modelli di robot cartesiani che possono essere forniti in 3 tipologie diverse:
 ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA. Corso di AUTOMAZIONE INDUSTRIALE
 UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA Corso di AUTOMAZIONE INDUSTRIALE Prof. Andrea Cataldo andrea.cataldo@itia.cnr.it ARGOMENTI delle ESERCITAZIONI CONTROLLO NUMERICO in AULA CONTROLLO
UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA Corso di AUTOMAZIONE INDUSTRIALE Prof. Andrea Cataldo andrea.cataldo@itia.cnr.it ARGOMENTI delle ESERCITAZIONI CONTROLLO NUMERICO in AULA CONTROLLO
03 Analisi di stabilita di un pendio
 03 Analisi di stabilita di un pendio BISHOP - FS = 1.651 LEGENDA: BELL - FS = 1.6335 BISHOP - FS = 1.651 BELL - FS = 1.6335 FELLENIUS - FS = 1.5839 FELLENIUS - FS = 1.5839 2400 2200 2000 1800 1600 1400
03 Analisi di stabilita di un pendio BISHOP - FS = 1.651 LEGENDA: BELL - FS = 1.6335 BISHOP - FS = 1.651 BELL - FS = 1.6335 FELLENIUS - FS = 1.5839 FELLENIUS - FS = 1.5839 2400 2200 2000 1800 1600 1400
MPDS-1CV/1CC HV PUSH
 MPDS-1CV/1CC HV PUSH ETL400MA04 / ETLMB400MB04 MANUALE UTENTE V. 1.5 INDICE: Alimentazione Del Dispositivo e Connessione al Modulo Led 2 Modalità Di Funzionamento 2-4 Modalità Potenziometro 100KΩ 2 Modalità
MPDS-1CV/1CC HV PUSH ETL400MA04 / ETLMB400MB04 MANUALE UTENTE V. 1.5 INDICE: Alimentazione Del Dispositivo e Connessione al Modulo Led 2 Modalità Di Funzionamento 2-4 Modalità Potenziometro 100KΩ 2 Modalità
INTRODUZIONE ALLA CINEMATICA DEL PUNTO MATERIALE PROF. FRANCESCO DE PALMA
 INTRODUZIONE ALLA CINEMATICA DEL PUNTO MATERIALE PROF. FRANCESCO DE PALMA Sommario MOTO E TRAIETTORIA... 3 PUNTO MATERIALE... 3 TRAIETTORIA... 3 VELOCITÀ... 4 VELOCITÀ MEDIA... 4 VELOCITÀ ISTANTANEA...
INTRODUZIONE ALLA CINEMATICA DEL PUNTO MATERIALE PROF. FRANCESCO DE PALMA Sommario MOTO E TRAIETTORIA... 3 PUNTO MATERIALE... 3 TRAIETTORIA... 3 VELOCITÀ... 4 VELOCITÀ MEDIA... 4 VELOCITÀ ISTANTANEA...
A spasso su Marte: modelli software per la cinematica di robot mobili
 A spasso su Marte: modelli software per la cinematica di robot mobili Davide Brugali Incontri Scientifici in Facoltà 30 Gennaio 2008 Didattica e Ricerca Corso di Laurea Specialistica in Ingegneria Informatica
A spasso su Marte: modelli software per la cinematica di robot mobili Davide Brugali Incontri Scientifici in Facoltà 30 Gennaio 2008 Didattica e Ricerca Corso di Laurea Specialistica in Ingegneria Informatica
PARCO MACCHINE/COMPANY EQUIPMENT
 PARCO MACCHINE/COMPANY EQUIPMENT CLOCK 1000 FMC Corse di lavoro: x 1050 y 800 z 800 CNC : MCM Z32 Velocità mandrino = 12000/min N.1 magazzino utensili in comune a 800 posti HSK 100 Cella con 80 tavole
PARCO MACCHINE/COMPANY EQUIPMENT CLOCK 1000 FMC Corse di lavoro: x 1050 y 800 z 800 CNC : MCM Z32 Velocità mandrino = 12000/min N.1 magazzino utensili in comune a 800 posti HSK 100 Cella con 80 tavole
PLE DPI
 PIATTAFORME DI LAVORO ELEVABILI INDICE Accordo Stato Regioni 22/02/2012: Attrezzature da lavoro 2.1 Categorie di PLE 2.2 Componenti strutturali 2.3 Dispositivi di comando e sicurezza 2.4 Controlli prima
PIATTAFORME DI LAVORO ELEVABILI INDICE Accordo Stato Regioni 22/02/2012: Attrezzature da lavoro 2.1 Categorie di PLE 2.2 Componenti strutturali 2.3 Dispositivi di comando e sicurezza 2.4 Controlli prima
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Cinematica Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale - a.a.
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Cinematica Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale - a.a.
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
rev Page 1 / 6
 Corpo in acciaio inox AISI 316L Unità Pan/Tilt con ricevitore integrato Rotazione continua IP66 Velocità variabile da 0.01 fino a 200 /s Configurazione attraverso on screen display Multiprotocollo Emotion
Corpo in acciaio inox AISI 316L Unità Pan/Tilt con ricevitore integrato Rotazione continua IP66 Velocità variabile da 0.01 fino a 200 /s Configurazione attraverso on screen display Multiprotocollo Emotion
La stima dei costi di produzione
 Università degli Studi di Trento Programmazione Costi e Contabilità lavori a.a. 2004-5 La stima dei costi di produzione Marco Masera, prof marco.masera@ing.unitn.it Procedimenti di stima I procedimenti
Università degli Studi di Trento Programmazione Costi e Contabilità lavori a.a. 2004-5 La stima dei costi di produzione Marco Masera, prof marco.masera@ing.unitn.it Procedimenti di stima I procedimenti
Supporto a Doppio Braccio per dual Monitor con 2 porte USB e Audio Pass-Through
 Supporto a Doppio Braccio per dual Monitor con 2 porte USB e Audio Pass-Through Product ID: ARMSLIMDUO Il braccio per doppio monitor ARMSLIMDUO consente di aumentare la produttività e liberare spazio prezioso.
Supporto a Doppio Braccio per dual Monitor con 2 porte USB e Audio Pass-Through Product ID: ARMSLIMDUO Il braccio per doppio monitor ARMSLIMDUO consente di aumentare la produttività e liberare spazio prezioso.
La colorazione standar della macchina è giallo RAL 1007 (NCS S1080-Y20R) e parti brunite nere.
 e parti brunite nere.") I bracci telescopici sono stati progettati e costruiti per essere installati su vie di corsa, per muoversi all interno di un area di lavoro, per annullare gli effetti generati dalla coppia di reazione
I bracci telescopici sono stati progettati e costruiti per essere installati su vie di corsa, per muoversi all interno di un area di lavoro, per annullare gli effetti generati dalla coppia di reazione
KUKA LeichtBau-Roboter LightWeight-Robot
 KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
Unità didattica 1. Prima unità didattica (Fisica) 1. Corso integrato di Matematica e Fisica per il Corso di Farmacia
 1. Corso integrato di Matematica e Fisica per il Corso di Farmacia") Unità didattica 1 Unità di misura Cinematica Posizione e sistema di riferimento....... 3 La velocità e il moto rettilineo uniforme..... 4 La velocità istantanea... 5 L accelerazione 6 Grafici temporali.
Unità didattica 1 Unità di misura Cinematica Posizione e sistema di riferimento....... 3 La velocità e il moto rettilineo uniforme..... 4 La velocità istantanea... 5 L accelerazione 6 Grafici temporali.
Programma di Robotica[LEGO EV3]
![Programma di Robotica[LEGO EV3]](/thumbs/39/19338690.jpg "Programma di Robotica[LEGO EV3]") Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
RELAZIONE TECNICA. ISTITUTO SUPERIORE STATALE G. GALILEI MIRANDOLA (MO) Via J. Barozzi, 4 Sede temporanea E.S.T.
 Via J. Barozzi, 4 Sede temporanea E.S.T.") ISTITUTO SUPERIORE STATALE G. GALILEI RELAZIONE TECNICA. 41037 MIRANDOLA (MO) Via J. Barozzi, 4 Sede temporanea E.S.T.Via 29 Maggio Presidenza 0535.22034 Fax 0535.20717 Email:segreteria@galileimirandola.it
ISTITUTO SUPERIORE STATALE G. GALILEI RELAZIONE TECNICA. 41037 MIRANDOLA (MO) Via J. Barozzi, 4 Sede temporanea E.S.T.Via 29 Maggio Presidenza 0535.22034 Fax 0535.20717 Email:segreteria@galileimirandola.it
PLC CodeSys. Esercitazione 3. Automation Robotics and System CONTROL. Università degli Studi di Ferrara
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Università degli Studi di Ferrara PLC CodeSys Esercitazione 3 Francesca Fanfoni francesca.fanfoni@unimore.it Indice
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Università degli Studi di Ferrara PLC CodeSys Esercitazione 3 Francesca Fanfoni francesca.fanfoni@unimore.it Indice
INTRODUZIONE AL DISEGNO TECNICO METODI DI RAPPRESENTAZIONE. Ing. Davide Russo Dipartimento di Ingegneria Industriale
 INTRODUZIONE AL DISEGNO TECNICO METODI DI RAPPRESENTAZIONE Ing. Davide Russo Dipartimento di Ingegneria Industriale ... IN QUESTA LEZIONE... il Disegno Tecnico ruolo tipologia Normazione (cenni) Metodi
INTRODUZIONE AL DISEGNO TECNICO METODI DI RAPPRESENTAZIONE Ing. Davide Russo Dipartimento di Ingegneria Industriale ... IN QUESTA LEZIONE... il Disegno Tecnico ruolo tipologia Normazione (cenni) Metodi
Sistemi di saldatura robotizzati
 Sistemi di saldatura robotizzati R1 B D P SSA 2000 - EA1900 C F A R2 E ITALARGON offre un servizio tecnologico che realizza sistemi di saldatura estremamente affidabili, in grado di soddisfare le esigenze
Sistemi di saldatura robotizzati R1 B D P SSA 2000 - EA1900 C F A R2 E ITALARGON offre un servizio tecnologico che realizza sistemi di saldatura estremamente affidabili, in grado di soddisfare le esigenze
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
Parte 1/4: Formazione delle immagini
 Parte 1/4: A.A. 2008-2009 - Corso di Computer Vision Eugenio Rustico rustico@dmi.unict.it D.M.I. - Università di Catania Versione: 30 marzo 2009 5-6 lezioni su Formazione dell immagine Calibrazione della
Parte 1/4: A.A. 2008-2009 - Corso di Computer Vision Eugenio Rustico rustico@dmi.unict.it D.M.I. - Università di Catania Versione: 30 marzo 2009 5-6 lezioni su Formazione dell immagine Calibrazione della
C ARPAN O EQUIPMENT. Joda micro - Tornio modulare
 MICRO C ARPAN O EQUIPMENT Joda micro - Tornio modulare Tornio con componenti modulari per creare la macchina ideale per le tue esigenze produttive I moduli disponibili: - Testa motrice - Contropunta pneumatica
MICRO C ARPAN O EQUIPMENT Joda micro - Tornio modulare Tornio con componenti modulari per creare la macchina ideale per le tue esigenze produttive I moduli disponibili: - Testa motrice - Contropunta pneumatica
4 Composto da: Features: E T
 » N 2 tubolari verticali diam. 7,6 in ferro zincato a 170» Nr. 2 vertical tubular pipes 7,6 in diameter made» Nr. 2 horizontal tubular pipes 6 in diameter made Ø cm 7,6 200 310 50 » N 2 tubolari verticali
» N 2 tubolari verticali diam. 7,6 in ferro zincato a 170» Nr. 2 vertical tubular pipes 7,6 in diameter made» Nr. 2 horizontal tubular pipes 6 in diameter made Ø cm 7,6 200 310 50 » N 2 tubolari verticali
Pincipi del movimento strumenti e processo
 Pincipi del movimento strumenti e processo Pincipi dell'animazione Fisica del movimento Squash and stretch -deformare la forma rivela la densità della massa ex:palla di gomma contro palla di ferro Timing
Pincipi del movimento strumenti e processo Pincipi dell'animazione Fisica del movimento Squash and stretch -deformare la forma rivela la densità della massa ex:palla di gomma contro palla di ferro Timing
I principali tipi di grafici
 I principali tipi di grafici Esiste una grande varietà di rappresentazioni grafiche. I grafici più semplici e nello stesso tempo più efficaci e comunemente utilizzati sono: I GRAFICI A BARRE I GRAFICI
I principali tipi di grafici Esiste una grande varietà di rappresentazioni grafiche. I grafici più semplici e nello stesso tempo più efficaci e comunemente utilizzati sono: I GRAFICI A BARRE I GRAFICI
Modelli LINEA DI ROBOT CON: ELEVATE PRESTAZIONI E AFFIDABILITÀ SOFTWARE OPERATIVI SPECIFICI DIVERSE TECNOLOGIE DI SALDATURA DATI TECNICI
 Modelli LINEA DI ROBOT CON: ELEVATE PRESTAZIONI E AFFIDABILITÀ SOFTWARE OPERATIVI SPECIFICI DIVERSE TECNOLOGIE DI SALDATURA DATI TECNICI UP6 UP20 UP20-6 UP6-A00 UP20-A00 UP20-A10 Assi controllati 6 6 6
Modelli LINEA DI ROBOT CON: ELEVATE PRESTAZIONI E AFFIDABILITÀ SOFTWARE OPERATIVI SPECIFICI DIVERSE TECNOLOGIE DI SALDATURA DATI TECNICI UP6 UP20 UP20-6 UP6-A00 UP20-A00 UP20-A10 Assi controllati 6 6 6
1 Introduzione al corso 3 1.1 Architettura del sistema di controllo... 6
 Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
CORSO DI PROGETTAZIONE COSTRUZIONI ED IMPIANTI
 CORSO DI PROGETTAZIONE COSTRUZIONI ED IMPIANTI A.S. 2012-2013 _ 28.09.2012 La meccanica e quella parte della fisica che descrive la quiete o il moto di un qualunque sistema materiale nello spazio e nel
CORSO DI PROGETTAZIONE COSTRUZIONI ED IMPIANTI A.S. 2012-2013 _ 28.09.2012 La meccanica e quella parte della fisica che descrive la quiete o il moto di un qualunque sistema materiale nello spazio e nel
Case History. Cesoia rotante. Application. Linea Taglio lamiera. Machine. Metal processing. Market
 Application Machine Market Cesoia rotante Linea Taglio lamiera Metal processing N. 23 inverter ADV200 da 1,5 a 355Kw per motorizzazioni linea N. 1 servo drive XVyA-EV da 630Kw per CESOIA ROTANTE N. 1 alimentatore
Application Machine Market Cesoia rotante Linea Taglio lamiera Metal processing N. 23 inverter ADV200 da 1,5 a 355Kw per motorizzazioni linea N. 1 servo drive XVyA-EV da 630Kw per CESOIA ROTANTE N. 1 alimentatore
Adattatori Morsa BDMpro
 1 Cosa sono I Nuovi Adattatori per la Morsa BDMpro consentono di utilizzare la morsa per centraline Bosch anche per le centraline Marelli, Siemens e Delphi. Perché utilizzarli I Nuovi Adattatori per la
1 Cosa sono I Nuovi Adattatori per la Morsa BDMpro consentono di utilizzare la morsa per centraline Bosch anche per le centraline Marelli, Siemens e Delphi. Perché utilizzarli I Nuovi Adattatori per la
La scrittura di un programma Modellizzazione del programma Scrittura del codice Esercizi. Sperimentazioni I. Alberto Garfagnini, Marco Mazzocco
 Sperimentazioni I Alberto Garfagnini, Marco Mazzocco Università degli studi di Padova 30 Ottobre 2013 La scrittura di un programma Modellizzazione programma Flowcharts Pseudocode Scrittura del codice Esercizi
Sperimentazioni I Alberto Garfagnini, Marco Mazzocco Università degli studi di Padova 30 Ottobre 2013 La scrittura di un programma Modellizzazione programma Flowcharts Pseudocode Scrittura del codice Esercizi
CIRCONFERENZA E CERCHIO. Parti di una circonferenza
 CIRCONFERENZ E CERCHIO Circonferenza: è il luogo geometrico dei punti equidistanti da un punto fisso detto centro Raggio: è la distanza tra un qualsiasi punto della circonferenza e il centro Cerchio: è
CIRCONFERENZ E CERCHIO Circonferenza: è il luogo geometrico dei punti equidistanti da un punto fisso detto centro Raggio: è la distanza tra un qualsiasi punto della circonferenza e il centro Cerchio: è
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Scuola Secondaria di 1 Grado Via MAFFUCCI-PAVONI Via Maffucci 60 Milano PROGETTO STRANIERI GEOMETRIA 2 CERCHIO SIMMETRIA GEOMETRIA SOLIDA
 Scuola Secondaria di 1 Grado Via MAFFUCCI-PAVONI Via Maffucci 60 Milano PROGETTO STRANIERI GEOMETRIA CERCHIO SIMMETRIA GEOMETRIA SOLIDA A cura di Maurizio Cesca PROGETTO STRANIERI SMS Maffucci-Pavoni -
Scuola Secondaria di 1 Grado Via MAFFUCCI-PAVONI Via Maffucci 60 Milano PROGETTO STRANIERI GEOMETRIA CERCHIO SIMMETRIA GEOMETRIA SOLIDA A cura di Maurizio Cesca PROGETTO STRANIERI SMS Maffucci-Pavoni -
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Lezione n 15: Assonometria di un esagono regolare parallelo al PO ad H a piacere
 Lezione n 15: Assonometria di un esagono regolare parallelo al PO ad H a piacere Strumenti occorrenti: 1) una coppia di squadrette 2) una matita n 3 oppure F 3) una gomma 4) un temperamatite Prepara il
Lezione n 15: Assonometria di un esagono regolare parallelo al PO ad H a piacere Strumenti occorrenti: 1) una coppia di squadrette 2) una matita n 3 oppure F 3) una gomma 4) un temperamatite Prepara il
Dinamica del corpo rigido
 Dinamica del corpo rigido Antonio Pierro Definizione di corpo rigido Moto di un corpo rigido Densità Momento angolare Momento d'inerzia Per consigli, suggerimenti, eventuali errori o altro potete scrivere
Dinamica del corpo rigido Antonio Pierro Definizione di corpo rigido Moto di un corpo rigido Densità Momento angolare Momento d'inerzia Per consigli, suggerimenti, eventuali errori o altro potete scrivere
La memoria secondaria
 La memoria secondaria La memoria principale non può essere troppo grande a causa del suo costo elevato Non consente la memorizzazione permanente dei dati (volatilità) Per questi motivi sono stati introdotti
La memoria secondaria La memoria principale non può essere troppo grande a causa del suo costo elevato Non consente la memorizzazione permanente dei dati (volatilità) Per questi motivi sono stati introdotti
Macchine Astratte. Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari. Linguaggi di Programmazione feb, 2016
 Macchine Astratte Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari Linguaggi di Programmazione 010194 29 feb, 2016 Sommario 1 Introduzione Macchina astratta Interprete Implementazione
Macchine Astratte Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari Linguaggi di Programmazione 010194 29 feb, 2016 Sommario 1 Introduzione Macchina astratta Interprete Implementazione
A ZOOMLION COMPANY WHY CIFA. Pompe Autocarrate e Bracci Stazionari Series CERTIFIED
 A ZOOMLION COMPANY WHY CIFA Pompe Autocarrate e Bracci Stazionari Series CERTIFIED WHY CIFA POMPE AUTOCARRATE DI FACILE UTILIZZO Con la linea CLASSIC di CIFA mira a fornire ai propri clienti delle pompe
A ZOOMLION COMPANY WHY CIFA Pompe Autocarrate e Bracci Stazionari Series CERTIFIED WHY CIFA POMPE AUTOCARRATE DI FACILE UTILIZZO Con la linea CLASSIC di CIFA mira a fornire ai propri clienti delle pompe
AUTOMAZIONE INDUSTRIALE
 AUTOMAZIONE INDUSTRIALE Lo schema seguente descrive l evoluzione dei sistemi di produzione industriale con l avvento dell automazione. Vengono presi in considerazione la lavorazione alle macchine utensili,
AUTOMAZIONE INDUSTRIALE Lo schema seguente descrive l evoluzione dei sistemi di produzione industriale con l avvento dell automazione. Vengono presi in considerazione la lavorazione alle macchine utensili,
RoboWave Pressbrake Descrizione Prodotto
 Versione: 1.2 Ultimo aggiornamento: Luglio 2014 RoboWave Pressbrake Descrizione Prodotto I. CARATTERISTICHE E FUNZIONALITÀ TECNICHE 8 1 IL PEZZO (IMPORT E CORREZIONE) 8 2. TIPI DI PIEGA 9 3. GLI UTENSILI
Versione: 1.2 Ultimo aggiornamento: Luglio 2014 RoboWave Pressbrake Descrizione Prodotto I. CARATTERISTICHE E FUNZIONALITÀ TECNICHE 8 1 IL PEZZO (IMPORT E CORREZIONE) 8 2. TIPI DI PIEGA 9 3. GLI UTENSILI
La velocità. Isabella Soletta - Liceo Fermi Documento riadattato da MyZanichelli.it
 La velocità Isabella Soletta - Liceo Fermi Documento riadattato da MyZanichelli.it Questo simbolo significa che l esperimento si può realizzare con materiali o strumenti presenti nel nostro laboratorio
La velocità Isabella Soletta - Liceo Fermi Documento riadattato da MyZanichelli.it Questo simbolo significa che l esperimento si può realizzare con materiali o strumenti presenti nel nostro laboratorio
Catalogo Corsi di Formazione 2008
 Catalogo Corsi di Formazione 2008 Linea di offerta Corsi di formazione sulle tecniche di programmazione e manutenzione. I corsi di formazione sono strutturati in modo da fornire, in funzione del grado
Catalogo Corsi di Formazione 2008 Linea di offerta Corsi di formazione sulle tecniche di programmazione e manutenzione. I corsi di formazione sono strutturati in modo da fornire, in funzione del grado
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA. TITOLO DEL PROGETTO: ipec
 FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
Fonte: Esempio a fini didattici
 I principali tipi di grafici Esiste una grande varietà di rappresentazioni grafiche. I grafici più semplici e nello stesso tempo più efficaci e comunemente utilizzati sono: i grafici a barre i grafici
I principali tipi di grafici Esiste una grande varietà di rappresentazioni grafiche. I grafici più semplici e nello stesso tempo più efficaci e comunemente utilizzati sono: i grafici a barre i grafici
Fresatura. Taglio e rifilatura. modelli e stampi. materiale composito. Carteggiatura
 è una società di ingegneria specializzata in automazione industriale e robotica. Per il settore della nautica e del materiale composito, offre servizi di consulenza e progettazione di macchine per l'automazione
è una società di ingegneria specializzata in automazione industriale e robotica. Per il settore della nautica e del materiale composito, offre servizi di consulenza e progettazione di macchine per l'automazione
SPECIFICHE TECNICHE: TECHNICAL SPECIFICATIONS:
 L'EQUILIBRIO PERFETTO PERFECT BALANCE Perfetto equilibrio è il concetto che ha ispirato la progettazione del GYRO SPEED, carrello per la movimentazione delle piante in vaso. Facendo tesoro dell esperienza
L'EQUILIBRIO PERFETTO PERFECT BALANCE Perfetto equilibrio è il concetto che ha ispirato la progettazione del GYRO SPEED, carrello per la movimentazione delle piante in vaso. Facendo tesoro dell esperienza
ITCG Sallustio Bandini
 ANNO SCOLASTICO 2015/2016 PROGRAMMA DI MATEMATICA CLASSE I sez. A corso GRAFICA INSEGNANTE: prof. MARIO SCACCIA Libro di Testo: Matematica.verde Vol. 1 multimediale- Algebra, Geometria, Statistica M.Bergamini
ANNO SCOLASTICO 2015/2016 PROGRAMMA DI MATEMATICA CLASSE I sez. A corso GRAFICA INSEGNANTE: prof. MARIO SCACCIA Libro di Testo: Matematica.verde Vol. 1 multimediale- Algebra, Geometria, Statistica M.Bergamini
Indice. P Preliminari 3. 1 Limiti e continuità 61. P.7 Funzioni trigonometriche 47. Per lo studente Ringraziamenti
 vii Indice Prefazione Per lo studente Ringraziamenti xiii xvii xix Che cosa è il calcolo differenziale? 1 P Preliminari 3 P.1 Numeri reali e retta reale 3 Intervalli 5 Il valore assoluto 8 Equazioni e
vii Indice Prefazione Per lo studente Ringraziamenti xiii xvii xix Che cosa è il calcolo differenziale? 1 P Preliminari 3 P.1 Numeri reali e retta reale 3 Intervalli 5 Il valore assoluto 8 Equazioni e
Pipeline. Esempio pipeline lineare a 5 stadi. Tempificazione S1 S2 S3 S4 S5. Istruzioni. Istruzione 4. Istruzione 3. Istruzione 2. tempo.
 Pipeline Esempio pipeline lineare a 5 stadi Istruzioni S1 S2 S3 S4 S5 Tempificazione Istruzione 4 S1 S2 S3 S4 S5 Istruzione 3 S1 S2 S3 S4 S5 Istruzione 2 S1 S2 S3 S4 S5 Istruzione 1 S1 S2 S3 S4 S5 tempo
Pipeline Esempio pipeline lineare a 5 stadi Istruzioni S1 S2 S3 S4 S5 Tempificazione Istruzione 4 S1 S2 S3 S4 S5 Istruzione 3 S1 S2 S3 S4 S5 Istruzione 2 S1 S2 S3 S4 S5 Istruzione 1 S1 S2 S3 S4 S5 tempo
Kemppi K5 Attrezzature di saldatura
 KempArc Pulse 350 QUALITÀ E PRODUTTIVITÀ AUTOMATICHE Kemppi K5 Attrezzature di saldatura 1(10) SISTEMA DI AUTOMAZIONE DELLA SALDATURA MIG/MAG PULSATA KempArc Pulse 350 è un sistema di automazione della
KempArc Pulse 350 QUALITÀ E PRODUTTIVITÀ AUTOMATICHE Kemppi K5 Attrezzature di saldatura 1(10) SISTEMA DI AUTOMAZIONE DELLA SALDATURA MIG/MAG PULSATA KempArc Pulse 350 è un sistema di automazione della
Premessa: Si continua a studiare il moto degli oggetti in approssimazione di PUNTO MATERIALE
 Leggi della Dinamica Premessa: Si continua a studiare il moto degli oggetti in approssimazione di PUNTO MATERIALE Fisica con Elementi di Matematica 1 Leggi della Dinamica Perché i corpi cambiano il loro
Leggi della Dinamica Premessa: Si continua a studiare il moto degli oggetti in approssimazione di PUNTO MATERIALE Fisica con Elementi di Matematica 1 Leggi della Dinamica Perché i corpi cambiano il loro
Il controllo numerico. LIUC - Ingegneria Gestionale 1
 Il controllo numerico LIUC - Ingegneria Gestionale 1 La lavorazione ed il controllo Le prime macchine a controllo numerico CN furono costruite nella metà circa degli anni 50 ma la loro diffusione su larga
Il controllo numerico LIUC - Ingegneria Gestionale 1 La lavorazione ed il controllo Le prime macchine a controllo numerico CN furono costruite nella metà circa degli anni 50 ma la loro diffusione su larga