Lez. 17/12/13 Funzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione
|
|
|
- Gilberto Pippi
- 8 anni fa
- Visualizzazioni
Transcript
1 Lez. 7/2/3 unzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione consideriamo il risultato del filtro passa alto che si può rappresentare schematicamente nel seguente modo: V max (ω) V Rmax (ω 2 C 2 R 2 ) + schema del sistema filtro pa (importante) Si supponga ora che l effetto di tale sistema sia indesiderato, vale a dire sia indesiderata un uscita alle alte frequenze pari a Vmax (basta far tendere nella funzione di trasferimento all interno del blocco la pulsazione a + infinito) e si voglia intervenire sul sistema stesso per regolarlo, cioè per imporre una uscita prefissata da progetto e pari a qualsivoglia esigenza del progettista. Si supponga perciò di disporre di tale sistema e si desideri un uscita sempre pari a V Rmax V max per qualsiasi 2 frequenza.. Il metodo fondamentale con cui intervenire regolango l uscita del sistema in modo hardware è quello del feed-back o retroazione. Lo schema proposto sopra è detto di azione o ad anello aperto e l uscita dipende solo dalla funzione di trasferiemnto del sistema e lo stesso non è regolato; la funzione di trasferimento (ω) và intesa come una funzione di processo come quella svolta da una caldaia che in ingresso presenta in ingresso una certa portata di gas e in uscita la temperatura ambientale: nelle condizioni non regolate non esiste alcuna correlazione fra portata di gas e temperatura ambiente e il sistema non è regolato, la temperatura ambient epotrebbe salire o scendere senza interventi sul flusso di gas nel bruciatore della caldaia. Si osservi il seguente schema: Vin Vmax + + VoutVRmaxVmax/2 Nd (ω) - Vg G(ω)

2 con Ndnodo differenziale (viene operata come vedremo la differenza aritmetica fra Vin e il segnale in arrivo sul ramo di reazione o di feedback). Si osserva che in tale sistema l uscita dipende dalla funzione di trasferiemnto dell intero sistema composto da e da G quest ultimo posto sul ramo detto di reazione del sistema, ma non solo dipende anche dallo stato dell uscita al momento t- precedente quello attuale.t. risulta utile semplificare tale sistema con un singolo blocco di azione equivalente: Vinp Vmax H(ω) VoutVRmaxVmax/2 Risulta: ( V g ) ḞV out con V g V out Ġ perciò ( V out G) ḞV out V out +V out G H V out (+G) se il nodo invece che essere differenziale è sommativo (Ns al posto di Nd) allora si dimostra che H V out ( G) nel caso in esame risulta: H V out (+G) 2 o meglio (+G) 2 da cui ricaviamo G (2 ) G e sostituendo G esistenza si ottiene G2 (ω 2 C 2 R 2 ) ( 2 ) (ω 2 C 2 R 2 ) + (ω 2 C 2 R 2 ) + risolvendo trascurando il campo di + si osserva che il secondo termine della differenza è la funzione di trasferimento di un filtro passa basso con le stesse resistenza e condensatore. Lo schema complessivo del sistema regolato in questo modo è lasciato x es allo studente. si osserva un ulteriore nodo differenziale e un blocco costituito da una funzione di trasferimento costante e in particolare maggiore di tale funzione di trasferimento è esclusiva di sistemi attivi vale a dire alimentati esternamente. Questo scopo sia di fornire fdt > che di eseguire differenze e
 VoutVRmaxVmax/2 Risulta: ( V g ) ḞV out")
3 somme è svolto da quadripoli attivi chiamati amplificatori operazionali, costituiti da circuiti complessi i cui componenti fondamentali sono i transistror, in tale macchina utilizzati come elevatori di segnali analogici e non in genere come interuttori comandati come avviene in campo digitale. Analizziamo il sistema con una tecnica fondamentale e chiamata delle trasformate di Laplace che permette di tracciare i diagrammi di Bode di Ampiezza e fase del rapporto fra segnale in uscita e segnale in ingresso ad un sistema comunque complesso. Questo metosdo porta all analisi snella della stabilità del sistema stesso (vedi seguito) ed intevenire per regolarlo e soprattutto stabilizzarlo. Consideriamo la seguente equazione integro differenziale non omogenea del secondo ordine. Vgen(t)Ri(t)+ L di(t) + dt C I (t)dt si opera una sostituzione della variabile t con la variabile sjω in un modo che qui eseguiamo brutalmente ma che può essere dimostrato con tale sostituzione di variabile si ottiene: Vgen(s)Ri( s)+lsi(s)+ Cs i(s) si opera la sostituzione alla derivazione d/dts e dt e una costante R resta R senza alcuna s variazione.e si osserva che l equazione integro differenziale nel dominio del tempo ora si è trasformata in una funzione lineare fratta nel dominio della frequenza complessa s e risolvibile sicuramente in modo semplice. Per semplicità consideriamo un fltro RC passivo: Riscriviamo l equazione risolutiva in funzione del tempo V C (t) C I (t)dt V R (t)r i(t) V gen (t)ri(t)+ C I(t)dt con V gen (t) Z i(t) e Z(s)R+ CS si opera una sostituzione della variabile t con la variabile sjω e si fissa l obiettivo in uscita: se è un filtro passa basso vorremmo la Vc in uscita quindi: V gen (s) RV gen ( Z (s)) +V (s) C tenendo presente che Vout Vc e Vin Vgen la funzione di trasferimento del sistema è la seguente: (s) V out si ottiene così: V gen (s) (( R+ ) R) R Cs ( s) (R+ Cs ) (R+ Cs ) (RCs+) RV gen ( Z(s)) V C( s) e esplicitando il valore assoluto di s che azzera il denominatore è chiamato POLO. (ZERO quello che annulla il numeratore: in qusto caso la funzione di trasferimento non ha zeri). Poniamo RC τ [s] (questo oltre che essere valore di interesse per il calcolo del polo è detta costante di carica del condensatore tale che la carica completa avviene in un tempo genralmente
 ed intevenire per regolarlo e soprattutto stabilizzarlo.")
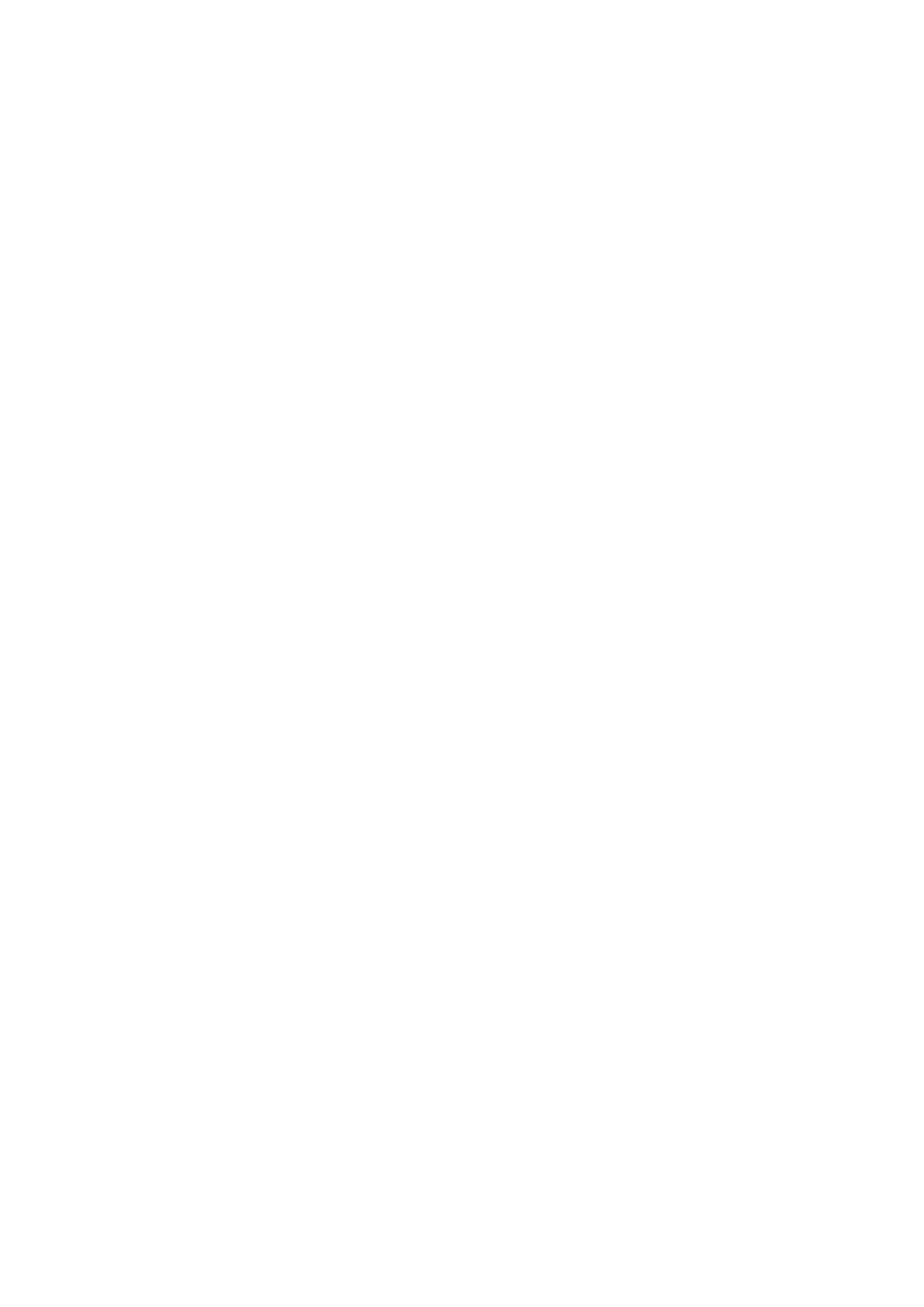
4 pari a 2,5 τ [s]; comunque la nosta ( s) (τ s+) in generale s τ e ω 0 τ ( s) A (τ s+) il polo è in questa si chiama pulsazione di taglio In ordinate sul diagramma di Bode si riporta il guadagno del sistema espresso in decibel (db) così definito: G[dB]20log ( (s)) con (s) V out in ascisse si riporta il Log ω diagramma di Bode del sistema analizzato è il seguente (la pulsazione di taglio è fissata indicativamente sulla scala del diagramma): G[dB] ω0 0dB -0dB -20dB Logω ω l intervallo fra Log ω e Log ω2 e così fra 2 e 3 ecc si chiama DECADE il valore che assume la funzione di Dobe in Log ω- logω è 20 Log A in corrispondenza della frequenza di taglio il valore del guadagno si riduce di 3 db rispetto al valore iniziale, la pendenza della retta è 20 db per decade verso il basso se si è in corrispondenza di un polo e verso l alto se uno zero, la frequenza di taglio di questo filtro passa basso è f t (2π RC) per il diagramma delle fasi si ricorda che artg b/a fi quindi per omega tendente a meno infinito la fase è -pigreca/2 e + pigreca/2 per omega tendente a + infinito la fase è 0 in corrispondenza della pulsazione di taglio sempre di 20 dbper decade di pendenza. Il diagramma delle fasi è lasciato allo studente. Abbiamo visto funzioni oscillatorie convergenti divergenti o limitate a secomda della funzione ampiezza nel dominio del tempo. Se condideriamo la ( s) A risolvendo normalmente il denominatore in s la funzione è stabile se il polo (τ s+) reale o complesso che sia abbia in generale parte reale negativa. Se il polo ha parte reale positiva è instabile se è 0 è limitata.
![fissata indicativamente sulla scala del diagramma): G[dB] ω0 0dB -0dB -20dB 2 3 4 0 00 000 0000 Logω ω l intervallo fra Log ω e Log ω2 e così fra 2 e 3 ecc si chiama DECADE il valore che assume la](/docs-images/48/5795391/images/page_4.jpg "funzione di Dobe in Log ω- logω è 20 Log A in corrispondenza della frequenza di taglio il valore del guadagno si riduce di 3 db rispetto al valore iniziale, la pendenza della retta è 20 db per decade")
5
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Funzioni di trasferimento. Lezione 14 2
 Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
BLOCCO AMPLIFICATORE. Amplificatore ideale. ELETTRONICA 1 per Ingegneria Biomedica Prof. Sergio Cova
 ELETTRONIC per Ingegneria Biomedica Prof. Sergio Cova BLOCCO MPLIFICTORE v i È un circuito integrato v i v v v i quindi v i mplificatore ideale resistenza di ingresso corrente assorbita dagli ingressi
ELETTRONIC per Ingegneria Biomedica Prof. Sergio Cova BLOCCO MPLIFICTORE v i È un circuito integrato v i v v v i quindi v i mplificatore ideale resistenza di ingresso corrente assorbita dagli ingressi
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Corso di orientamento. Indirizzo: ELETTRONICA E TELECOMUNICAZIONI
 M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Corso di orientamento Indirizzo: ELETTRONICA E TELECOMUNICAZIONI Tema di: ELETTRONICA (Testo valevole per i corsi di ordinamento e per i corsi sperimentali
M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Corso di orientamento Indirizzo: ELETTRONICA E TELECOMUNICAZIONI Tema di: ELETTRONICA (Testo valevole per i corsi di ordinamento e per i corsi sperimentali
Appendice Circuiti con amplificatori operazionali
 Appendice Circuiti con amplificatori operazionali - Appendice Circuiti con amplificatori operazionali - L amplificatore operazionale Il componente ideale L amplificatore operazionale è un dispositivo che
Appendice Circuiti con amplificatori operazionali - Appendice Circuiti con amplificatori operazionali - L amplificatore operazionale Il componente ideale L amplificatore operazionale è un dispositivo che
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
RISONANZA. Introduzione. Risonanza Serie.
 RISONANZA Introduzione. Sia data una rete elettrica passiva, con elementi resistivi e reattivi, alimentata con un generatore di tensione sinusoidale a frequenza variabile. La tensione di alimentazione
RISONANZA Introduzione. Sia data una rete elettrica passiva, con elementi resistivi e reattivi, alimentata con un generatore di tensione sinusoidale a frequenza variabile. La tensione di alimentazione
( x) ( x) 0. Equazioni irrazionali
 ( x) 0. Equazioni irrazionali") Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Dalle misure eseguite con un segnale sinusoidale su di un impianto si è verificato che esso:
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
di Heaveside: ricaviamo:. Associamo alle grandezze sinusoidali i corrispondenti fasori:, Adesso sostituiamo nella
 Equazione di Ohm nel dominio fasoriale: Legge di Ohm:. Dalla definizione di operatore di Heaveside: ricaviamo:. Associamo alle grandezze sinusoidali i corrispondenti fasori:, dove Adesso sostituiamo nella
Equazione di Ohm nel dominio fasoriale: Legge di Ohm:. Dalla definizione di operatore di Heaveside: ricaviamo:. Associamo alle grandezze sinusoidali i corrispondenti fasori:, dove Adesso sostituiamo nella
Anno 4 Grafico di funzione
 Anno 4 Grafico di funzione Introduzione In questa lezione impareremo a disegnare il grafico di una funzione reale. Per fare ciò è necessario studiare alcune caratteristiche salienti della funzione che
Anno 4 Grafico di funzione Introduzione In questa lezione impareremo a disegnare il grafico di una funzione reale. Per fare ciò è necessario studiare alcune caratteristiche salienti della funzione che
Esercitazione n 1: Circuiti di polarizzazione (1/2)
") Esercitazione n 1: Circuiti di polarizzazione (1/2) 1) Per il circuito in Fig. 1 determinare il valore delle resistenze R B ed R C affinché: = 3 ma - V CE = 7 V. Siano noti: = 15 V; β = 120; V BE = 0,7
Esercitazione n 1: Circuiti di polarizzazione (1/2) 1) Per il circuito in Fig. 1 determinare il valore delle resistenze R B ed R C affinché: = 3 ma - V CE = 7 V. Siano noti: = 15 V; β = 120; V BE = 0,7
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
INTEGRATORE E DERIVATORE REALI
 INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
INTEGRATORE E DERIVATORE REALI -Schemi elettrici: Integratore reale : C1 R2 vi (t) R1 vu (t) Derivatore reale : R2 vi (t) R1 C1 vu (t) Elenco componenti utilizzati : - 1 resistenza da 3,3kΩ - 1 resistenza
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE
 LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE MODULO : Analisi dei circuiti lineari in regime sinusoidale PREMESSA L analisi dei sistemi elettrici lineari, in regime sinusoidale, consente di determinare
LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE MODULO : Analisi dei circuiti lineari in regime sinusoidale PREMESSA L analisi dei sistemi elettrici lineari, in regime sinusoidale, consente di determinare
Istituto Tecnico Industriale Statale Enrico Mattei
 Istituto Tecnico Industriale Statale Enrico Mattei Specializzazione di Elettronica ed Elettrotecnica URBINO Corso di Sistemi Automatici Elettronici ESERCITAZIONE TRASFORMATA DI LAPLACE Circuiti del primo
Istituto Tecnico Industriale Statale Enrico Mattei Specializzazione di Elettronica ed Elettrotecnica URBINO Corso di Sistemi Automatici Elettronici ESERCITAZIONE TRASFORMATA DI LAPLACE Circuiti del primo
ELETTRONICA. L amplificatore Operazionale
 ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
ELETTRONICA L amplificatore Operazionale Amplificatore operazionale Un amplificatore operazionale è un amplificatore differenziale, accoppiato in continua e ad elevato guadagno (teoricamente infinito).
Anno 5 4. Funzioni reali: il dominio
 Anno 5 4 Funzioni reali: il dominio 1 Introduzione In questa lezione impareremo a definire cos è una funzione reale di variabile reale e a ricercarne il dominio. Al termine di questa lezione sarai in grado
Anno 5 4 Funzioni reali: il dominio 1 Introduzione In questa lezione impareremo a definire cos è una funzione reale di variabile reale e a ricercarne il dominio. Al termine di questa lezione sarai in grado
L'amplificatore operazionale - principi teorici
 L'amplificatore operazionale - principi teorici Cos'è? L'amplificatore operazionale è un circuito integrato che produce in uscita una tensione pari alla differenza dei suoi due ingressi moltiplicata per
L'amplificatore operazionale - principi teorici Cos'è? L'amplificatore operazionale è un circuito integrato che produce in uscita una tensione pari alla differenza dei suoi due ingressi moltiplicata per
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Istituto d Istruzione Secondaria Superiore M.BARTOLO. A cura del Prof S. Giannitto
 Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Trasformate di Laplace
 TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
2 FUNZIONI REALI DI VARIABILE REALE
 2 FUNZIONI REALI DI VARIABILE REALE 2.1 CONCETTO DI FUNZIONE Definizione 2.1 Siano A e B due insiemi. Una funzione (o applicazione) f con dominio A a valori in B è una legge che associa ad ogni elemento
2 FUNZIONI REALI DI VARIABILE REALE 2.1 CONCETTO DI FUNZIONE Definizione 2.1 Siano A e B due insiemi. Una funzione (o applicazione) f con dominio A a valori in B è una legge che associa ad ogni elemento
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Studio nel dominio del tempo. Le correnti sulla resistenza e sul condensatore, considerando che il punto M è a massa virtuale, valgono:
 INTEGRATORE E DERIVATORE Oltre le quattro operazioni matematiche (addizione, sottrazione, moltiplicazione, divisione) l A.O. è in grado di compiere anche altre operazioni tra le quali parecchio importanti
INTEGRATORE E DERIVATORE Oltre le quattro operazioni matematiche (addizione, sottrazione, moltiplicazione, divisione) l A.O. è in grado di compiere anche altre operazioni tra le quali parecchio importanti
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
M049 - ESAME DI STATO DI ISTITUTO PROFESSIONALE. Indirizzo: TECNICO DELLE INDUSTRIE ELETTRONICHE CORSO DI ORDINAMENTO
 M049 - ESAME DI STATO DI ISTITUTO PROFESSIONALE Indirizzo: TECNICO DELLE INDUSTRIE ELETTRONICHE CORSO DI ORDINAMENTO Tema di: ELETTRONICA, TELECOMUNICAZIONI E APPLICAZIONI Il candidato, formulando eventuali
M049 - ESAME DI STATO DI ISTITUTO PROFESSIONALE Indirizzo: TECNICO DELLE INDUSTRIE ELETTRONICHE CORSO DI ORDINAMENTO Tema di: ELETTRONICA, TELECOMUNICAZIONI E APPLICAZIONI Il candidato, formulando eventuali
Introduzione. Margine di ampiezza... 2 Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di Bode... 6
 ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Rappresentazione nello spazio degli stati
 Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
Diagrammi di Bode. I Diagrammi di Bode sono due: 1) il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione
 il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione") 0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Funzioni. Parte prima. Daniele Serra
 Funzioni Parte prima Daniele Serra Nota: questi appunti non sostituiscono in alcun modo le lezioni del prof. Favilli, né alcun libro di testo. Sono piuttosto da intendersi a integrazione di entrambi. 1
Funzioni Parte prima Daniele Serra Nota: questi appunti non sostituiscono in alcun modo le lezioni del prof. Favilli, né alcun libro di testo. Sono piuttosto da intendersi a integrazione di entrambi. 1
Elettronica e Telecomunicazioni Classe Quinta. La trasformata di Laplace
 Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Esercizi svolti. 1. Si consideri la funzione f(x) = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di
 = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di") Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Capitolo 2. Operazione di limite
 Capitolo 2 Operazione di ite In questo capitolo vogliamo occuparci dell operazione di ite, strumento indispensabile per scoprire molte proprietà delle funzioni. D ora in avanti riguarderemo i domini A
Capitolo 2 Operazione di ite In questo capitolo vogliamo occuparci dell operazione di ite, strumento indispensabile per scoprire molte proprietà delle funzioni. D ora in avanti riguarderemo i domini A
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI
 FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
FUNZIONI / ESERCIZI SVOLTI
 ANALISI MATEMATICA I - A.A. 0/0 FUNZIONI / ESERCIZI SVOLTI ESERCIZIO. Data la funzione f () = determinare l insieme f (( +)). Svolgimento. Poiché f (( +)) = { dom f : f () ( +)} = { dom f : f () > } si
ANALISI MATEMATICA I - A.A. 0/0 FUNZIONI / ESERCIZI SVOLTI ESERCIZIO. Data la funzione f () = determinare l insieme f (( +)). Svolgimento. Poiché f (( +)) = { dom f : f () ( +)} = { dom f : f () > } si
Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza p. 2
 Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza Valentino Liberali Dipartimento di Tecnologie dell Informazione Università di Milano, 26013
Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza Valentino Liberali Dipartimento di Tecnologie dell Informazione Università di Milano, 26013
Elettronica delle Telecomunicazioni Esercizi cap 2: Circuiti con Ampl. Oper. 2.1 Analisi di amplificatore AC con Amplificatore Operazionale reale
 2. Analisi di amplificatore AC con Amplificatore Operazionale reale Un amplificatore è realizzato con un LM74, con Ad = 00 db, polo di Ad a 0 Hz. La controreazione determina un guadagno ideale pari a 00.
2. Analisi di amplificatore AC con Amplificatore Operazionale reale Un amplificatore è realizzato con un LM74, con Ad = 00 db, polo di Ad a 0 Hz. La controreazione determina un guadagno ideale pari a 00.
Prova Parziale 1 Corso di Biosensori - Ing. Mazzei (22 Aprile 2013)
") Prova Parziale 1 Corso di Biosensori - Ing. Mazzei (22 Aprile 2013) Esercizio 1 Considerando la seguente tabella riportante i dati raccolti per la taratura di un sensore di temperatura. Si determini: -
Prova Parziale 1 Corso di Biosensori - Ing. Mazzei (22 Aprile 2013) Esercizio 1 Considerando la seguente tabella riportante i dati raccolti per la taratura di un sensore di temperatura. Si determini: -
FUNZIONE REALE DI UNA VARIABILE
 FUNZIONE REALE DI UNA VARIABILE Funzione: legge che ad ogni elemento di un insieme D (Dominio) tale che D R, fa corrispondere un elemento y R ( R = Codominio ). f : D R : f () = y ; La funzione f(): A
FUNZIONE REALE DI UNA VARIABILE Funzione: legge che ad ogni elemento di un insieme D (Dominio) tale che D R, fa corrispondere un elemento y R ( R = Codominio ). f : D R : f () = y ; La funzione f(): A
CONCETTO DI LIMITE DI UNA FUNZIONE REALE
 CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
la funzione è definita la funzione non è definita Si osservi, infatti, che la radice di un numero negativo non esiste nel campo dei numeri reali.
 1 y 4 CAMPO DI ESISTENZA. Poiché data è una irrazionale con indice di radice pari, il cui radicando è un polinomio, essa risulta definita solo per i valori della per i quali il radicando è positivo, ovvero
1 y 4 CAMPO DI ESISTENZA. Poiché data è una irrazionale con indice di radice pari, il cui radicando è un polinomio, essa risulta definita solo per i valori della per i quali il radicando è positivo, ovvero
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
E evidente che le carattteristiche dell OPAMP ideale non possono essere raggiunte da nessun circuito reale. Gli amplificatori operazionali reali
 E evidente che le carattteristiche dell OPAMP ideale non possono essere raggiunte da nessun circuito reale. Gli amplificatori operazionali reali hanno però caratteristiche che approssimano molto bene il
E evidente che le carattteristiche dell OPAMP ideale non possono essere raggiunte da nessun circuito reale. Gli amplificatori operazionali reali hanno però caratteristiche che approssimano molto bene il
CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO. Prof. Silvio Stasi Dott. Ing. Nadia Salvatore Dott. Ing. Michele Debenedictis
 CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO SCHEMA DELL AZIONAMENTO A CATENA APERTA AZIONAMENTO L azionamento a catena aperta comprende il motore asincrono e il relativo convertitore statico che riceve
CONTROLLO SCALARE V/Hz DEL MOTORE ASINCRONO SCHEMA DELL AZIONAMENTO A CATENA APERTA AZIONAMENTO L azionamento a catena aperta comprende il motore asincrono e il relativo convertitore statico che riceve
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI
 APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
Sistema dinamico a tempo continuo
 Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Fondamenti di Automatica. Unità 2 Calcolo del movimento di sistemi dinamici LTI
 Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Valutazione delle impedenze equivalenti nei circuiti con retroazione.
 UNIVERSITÀ DI PADOVA Facoltà di Ingegneria Corso di Laurea in Ingegneria dell Informazione Tesina di Laurea Triennale Valutazione delle impedenze equivalenti nei circuiti con retroazione. -La formula di
UNIVERSITÀ DI PADOVA Facoltà di Ingegneria Corso di Laurea in Ingegneria dell Informazione Tesina di Laurea Triennale Valutazione delle impedenze equivalenti nei circuiti con retroazione. -La formula di
Studio di una funzione ad una variabile
 Studio di una funzione ad una variabile Lo studio di una funzione ad una variabile ha come scopo ultimo quello di pervenire a un grafico della funzione assegnata. Questo grafico non dovrà essere preciso
Studio di una funzione ad una variabile Lo studio di una funzione ad una variabile ha come scopo ultimo quello di pervenire a un grafico della funzione assegnata. Questo grafico non dovrà essere preciso
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Le funzioni continue. A. Pisani Liceo Classico Dante Alighieri A.S. 2002-03. A. Pisani, appunti di Matematica 1
 Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
Basi di matematica per il corso di micro
 Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
Lab 4 Filtri con amplificatori operazionali
 Aggiungendo alcuni condensatori e resistenze ad un semplice circuito con amplificatore operazionale (Op Amp) si possono ottenere molti circuiti analogici interessanti come filtri attivi, integratori e
Aggiungendo alcuni condensatori e resistenze ad un semplice circuito con amplificatore operazionale (Op Amp) si possono ottenere molti circuiti analogici interessanti come filtri attivi, integratori e
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
INTEGRALI DEFINITI. Tale superficie viene detta trapezoide e la misura della sua area si ottiene utilizzando il calcolo di un integrale definito.
 INTEGRALI DEFINITI Sia nel campo scientifico che in quello tecnico si presentano spesso situazioni per affrontare le quali è necessario ricorrere al calcolo dell integrale definito. Vi sono infatti svariati
INTEGRALI DEFINITI Sia nel campo scientifico che in quello tecnico si presentano spesso situazioni per affrontare le quali è necessario ricorrere al calcolo dell integrale definito. Vi sono infatti svariati
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO
 A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO
 LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
SEGNO DELLA FUNZIONE. Anche in questo caso, per lo studio del segno della funzione, occorre risolvere la disequazione: y > 0 Ne segue:
 CAMPO DI ESISTENZA. Poiché la funzione data è una razionale fratta, essa risulta definita su tutto l asse reale tranne che nei punti in cui il denominatore della frazione si annulla, cioè: C.E. { R: 0}
CAMPO DI ESISTENZA. Poiché la funzione data è una razionale fratta, essa risulta definita su tutto l asse reale tranne che nei punti in cui il denominatore della frazione si annulla, cioè: C.E. { R: 0}
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
1. Distribuzioni campionarie
 Università degli Studi di Basilicata Facoltà di Economia Corso di Laurea in Economia Aziendale - a.a. 2012/2013 lezioni di statistica del 3 e 6 giugno 2013 - di Massimo Cristallo - 1. Distribuzioni campionarie
Università degli Studi di Basilicata Facoltà di Economia Corso di Laurea in Economia Aziendale - a.a. 2012/2013 lezioni di statistica del 3 e 6 giugno 2013 - di Massimo Cristallo - 1. Distribuzioni campionarie
CORSO di AUTOMAZIONE INDUSTRIALE
 CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
5 Amplificatori operazionali
 5 Amplificatori operazionali 5.1 Amplificatore operazionale: caratteristiche, ideale vs. reale - Di seguito simbolo e circuito equivalente di un amplificatore operazionale. Da notare che l amplificatore
5 Amplificatori operazionali 5.1 Amplificatore operazionale: caratteristiche, ideale vs. reale - Di seguito simbolo e circuito equivalente di un amplificatore operazionale. Da notare che l amplificatore
1 Appunti a cura di prof.ssa MINA Maria Letizia integrati e pubblicati in data 12/10/10
 FUNZIONE OMOGRAFICA ASINTOTO VERTICALE: ASINTOTO ORIZZONTALE: 1 abbiamo verificato che, applicando all iperbole equilatera base, la dilatazione verticale di coefficiente 7 e la traslazione di vettore di
FUNZIONE OMOGRAFICA ASINTOTO VERTICALE: ASINTOTO ORIZZONTALE: 1 abbiamo verificato che, applicando all iperbole equilatera base, la dilatazione verticale di coefficiente 7 e la traslazione di vettore di
Esercizi di Macroeconomia per il corso di Economia Politica
 Esercizi di Macroeconomia per il corso di Economia Politica (Gli esercizi sono suddivisi in base ai capitoli del testo di De Vincenti) CAPITOLO 3. IL MERCATO DEI BENI NEL MODELLO REDDITO-SPESA Esercizio.
Esercizi di Macroeconomia per il corso di Economia Politica (Gli esercizi sono suddivisi in base ai capitoli del testo di De Vincenti) CAPITOLO 3. IL MERCATO DEI BENI NEL MODELLO REDDITO-SPESA Esercizio.
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
GRANDEZZE ALTERNATE SINUSOIDALI
 GRANDEZZE ALTERNATE SINUSOIDALI 1 Nel campo elettrotecnico-elettronico, per indicare una qualsiasi grandezza elettrica si usa molto spesso il termine di segnale. L insieme dei valori istantanei assunti
GRANDEZZE ALTERNATE SINUSOIDALI 1 Nel campo elettrotecnico-elettronico, per indicare una qualsiasi grandezza elettrica si usa molto spesso il termine di segnale. L insieme dei valori istantanei assunti
Esempi di uso e applicazioni di Matlab e simulink. 1) Uso delle funzioni ode23 e ode45 per l'integrazione di equazioni differenziali con Matlab
 Uso delle funzioni ode23 e ode45 per l'integrazione di equazioni differenziali con Matlab") Esempi di uso e applicazioni di Matlab e simulink ) Uso delle funzioni ode23 e ode45 per l'integrazione di equazioni differenziali con Matlab Sia dato da integrare una equazione differenziale scalare di
Esempi di uso e applicazioni di Matlab e simulink ) Uso delle funzioni ode23 e ode45 per l'integrazione di equazioni differenziali con Matlab Sia dato da integrare una equazione differenziale scalare di
PROVA SCRITTA DI ELETTRONICA Prof. Luca Salvini 4Ae Nome 22/10/2011
 4Ae 22/10/2011 Saper rappresentare un segnale periodico nel dominio del tempo e della frequenza 1. Disegna, all'interno dei riquadri sottostanti, il grafico dei segnali indicati nel dominio del tempo (a
4Ae 22/10/2011 Saper rappresentare un segnale periodico nel dominio del tempo e della frequenza 1. Disegna, all'interno dei riquadri sottostanti, il grafico dei segnali indicati nel dominio del tempo (a
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Modellazione e Analisi di Reti Elettriche
 Modellazione e Analisi di eti Elettriche Modellazione e Analisi di eti Elettriche Davide Giglio Introduzione alle eti Elettriche e reti elettriche costituite da resistori, condensatori e induttori (bipoli),
Modellazione e Analisi di eti Elettriche Modellazione e Analisi di eti Elettriche Davide Giglio Introduzione alle eti Elettriche e reti elettriche costituite da resistori, condensatori e induttori (bipoli),
Il simbolo. è è = = = In simboli: Sia un numero naturale diverso da zero, il radicale. Il radicale. esiste. esiste 0 Il radicale
 Radicali 1. Radice n-esima Terminologia Il simbolo è detto radicale. Il numero è detto radicando. Il numero è detto indice del radicale. Il numero è detto coefficiente del radicale. Definizione Sia un
Radicali 1. Radice n-esima Terminologia Il simbolo è detto radicale. Il numero è detto radicando. Il numero è detto indice del radicale. Il numero è detto coefficiente del radicale. Definizione Sia un
Modellistica e controllo dei motori in corrente continua
 Modellistica e controllo dei motori in corrente continua Note per le lezioni del corso di Controlli Automatici A.A. 2008/09 Prof.ssa Maria Elena Valcher 1 Modellistica Un motore in corrente continua si
Modellistica e controllo dei motori in corrente continua Note per le lezioni del corso di Controlli Automatici A.A. 2008/09 Prof.ssa Maria Elena Valcher 1 Modellistica Un motore in corrente continua si
4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI
 119 4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI Indice degli Argomenti: TEMA N. 1 : INSIEMI NUMERICI E CALCOLO
119 4 Dispense di Matematica per il biennio dell Istituto I.S.I.S. Gaetano Filangieri di Frattamaggiore EQUAZIONI FRATTE E SISTEMI DI EQUAZIONI Indice degli Argomenti: TEMA N. 1 : INSIEMI NUMERICI E CALCOLO
Y (s) X(s) = H(s) 1 + G(s)H(s) H(s) e la funzione di transfert open loop e Y (s)/x(s) indica la funzione di transfert closed loop.
 X(s) = H(s) 1 + G(s)H(s) H(s) e la funzione di transfert open loop e Y (s)/x(s) indica la funzione di transfert closed loop.") 1 Cenni introduttivi sulle proprieta elementari del Feedback La tecnica del feedback e applicata molto estesamente nei circuiti analogici, ad es. il feedback negativo permette eleborazioni i segnali con
1 Cenni introduttivi sulle proprieta elementari del Feedback La tecnica del feedback e applicata molto estesamente nei circuiti analogici, ad es. il feedback negativo permette eleborazioni i segnali con