Corso di Visione Artificiale. Camera. Samuel Rota Bulò
|
|
|
- Fabio Lazzari
- 6 anni fa
- Visualizzazioni
Transcript

1 Corso di Visione Artificiale Camera Samuel Rota Bulò

2 Prima fotografia Era noto sin dal medioevo che certi sali di argento si oscurano velocemente sotto la luce del sole. Nel 1826 Niepce ottenne la prima vera fotografia esponendo alla luce della carta trattata con cloruro di argento posta all'interno di una camera oscura e fissando poi l'immagine con acido nitrico.
3 Formazione di immagini Che succede ponendo una pellicola di fronte ad un oggetto? PELLICOLA
4 Formazione di immagine Aggiungendo una barriera con un foro (foto stenopeico) si riduce la sfocatura. BARRIERA PELLICOLA

5 Camera oscura Nota ad Aristotele ed Euclide



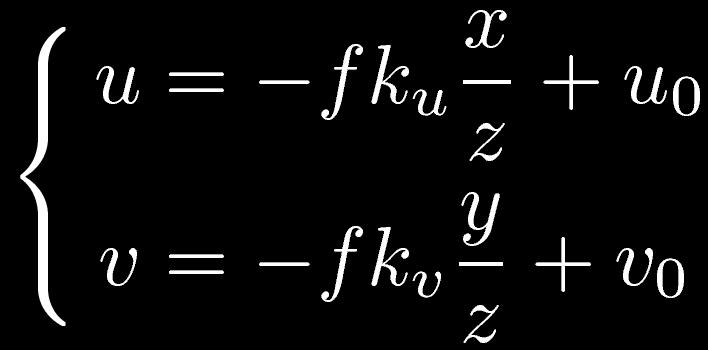
6 Modello della camera oscura PROIEZIONE PROSPETTICA


7 Proiezione ortografica Se l'oggetto ha una profondità ininfluente rispetto alla distanza dalla camera possiamo adottare un modello ortografico.

8 Problemi della camera oscura Un foro troppo grande introduce problemi di sfocatura Un foro troppo piccolo fa passare troppa poca luce (tempi di esposizione lunghi)
9 Lenti Le lenti consentono di raccogliere più luce e mantenere la stessa proiezione sui punti a fuoco. Per contro, non tutta la scena può essere messa a fuoco allo stesso momento.

10 Lenti sottili Nei punti a fuoco vale la relazione Nei punti non a fuoco si crea un cerchio di confusione. Finché il cerchio di confusione non supera le dimensione degli elementi fotosensibili l'immagine è a fuoco. L'intervallo di profondità in cui i punti sono a fuoco è detto profondità di campo. La profondità di campo è inversamente proporzionale al diametro della lente.
11 Ottica telecentrica Con un'ottica telecentrica l'immagine di un punto non dipende dalla profondità. So ottiene ponendo una barriera con un foro steopeico in corrispondenza del punto di fuoco.
12 Formazione dell'immagine nell'occhio Fotocamera Lente ha una distanza focale fissa. La messa a fuoco avviene variando la distanza tra lente e piano immagine, in cui la pellicola/chip è posizionata. Occhio Distanza tra lente e regione immagine (retina) è fissa. La forma della lente viene variata per ottenere una messa a fuoco dell'immagine.

13 Formazione dell'immagine nell'occhio

14 Formazione dell'immagine nell'occhio
15 Miopia e ipermetropia
 viene convertita in immagine, ovvero una matrice MxN di valori interi. La dimensione n x m della matrice CCD non è necessariamente la stessa dell'immagine NxM.")
16 Immagini digitali Una fotocamera digitale è composta dall'ottica, approssimata con una lente sottile, e una matrice CCD (Charge-Coupled Device) o CMOS che costituisce il piano immagine. La matrice del CCD (o CMOS) viene convertita in immagine, ovvero una matrice MxN di valori interi. La dimensione n x m della matrice CCD non è necessariamente la stessa dell'immagine NxM. Ad ogni pixel corrisponde un'area rettangolare del CCD (detta impronta del pixel).



17 Modello della fotocamera

18 Pixelizzazione
19 Skewness
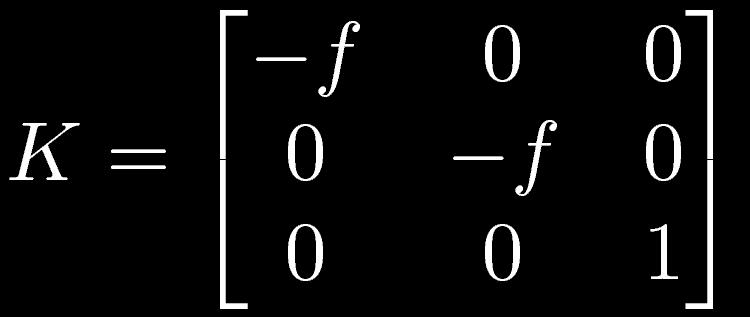
20 Parametri intrinseci I parametri intrinseci sono i parametri che sono codificati nella matrice K. Rappresentano parametri che caratterizzano la singola fotocamera, indipendentemente dal mondo che la circonda.


21 Parametri estrinseci I parametri estrinseci caratterizzano la trasformazione tra coordinate camera e coordinate mondo.

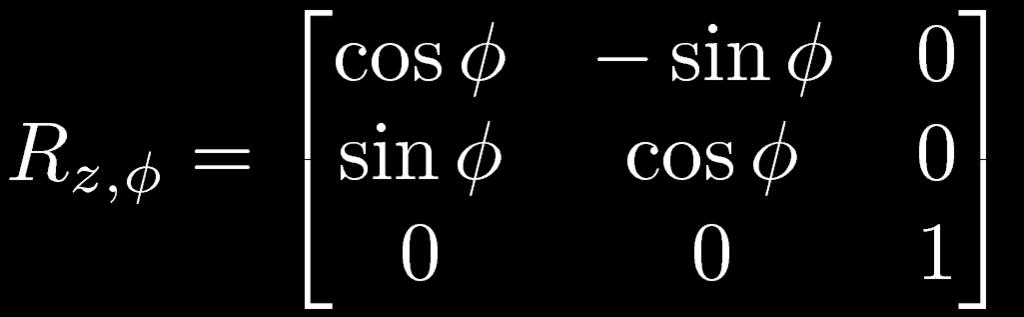

22 Matrice di rotazione


23 Matrice di rotazione rispetto ad un asse u è il versore unitario che individua l'asse di rotazione (che passa per l'origine).



24 Matrice di proiezione prospettica (MPP)


25 Centro ottico Il piano focale contiene i punti che si proiettano all'infinito ed ha quindi equazione: I piani di che si proiettano nell'immagine sugli assi u=0 e v=0 sono dati da Il centro ottico C è dato dall'intersezione di questi 3 piani.



26 Centro ottico Riscriviamo la MPP nel seguente modo e ricordando che otteniamo



27 Raggio ottico Il raggio ottico del punto m è la linea retta che passa per il centro ottico C ed m stesso. Oltre al centro ottico, un altro punto (ideale) del raggio è L'equazione parametrica del raggio ottico è la seguente:

28 Calibrazione La calibrazione consiste nel misurare i parametri intrinseci ed estrinseci della camera. L'idea è che conoscendo le proiezioni di punti 3D di coordinate note, sia possibile ottenere i parametri incogniti risolvendo le equazioni della proiezione prospettica.


29 Metodo DLT Dati n punti di calibrazione non coplanari, ciascuna corrispondenza tra un punto dell'immagine mi =[ui,vi,1] e uno della scena Mi fornisce una coppia di equazioni: che in forma matriciale diviene Da risolvere ai minimi quadrati con almeno 6 punti.

30 Metodo non lineare Il metodo DLT è lineare, veloce, ma minimizza un errore algebrico Ax che non ha significato geometrico. Una precisione maggiore può essere ottenuta minimizzando un errore geometrico. Per esempio possiamo minimizzare l'errore di proiezione.
![Estrazione dei parametri Data una matrice P=[Q q] di rango 3 possiamo decomporla come Notiamo che Q=KR dove K è triangolare superiore ed R](/docs-images/62/48265564/images/31-5.jpg "ortogonale.")
31 Estrazione dei parametri Data una matrice P=[Q q] di rango 3 possiamo decomporla come Notiamo che Q=KR dove K è triangolare superiore ed R ortogonale. Se invertiamo Q otteniamo che altro non è che la decomposizione QR, con U ortogonale e S triangolare superiore Infine ricaviamo

 alle coordinate reali distorte centro")
32 Distorsione radiale Un modello più accurato della camera deve tenere conto della distorsione radiale delle lenti. Il modello standard è una trasformazione delle coordinate corrette (u,v) alle coordinate reali distorte centro immagine
Parte 1/4: Formazione delle immagini
 Parte 1/4: A.A. 2008-2009 - Corso di Computer Vision Eugenio Rustico rustico@dmi.unict.it D.M.I. - Università di Catania Versione: 30 marzo 2009 5-6 lezioni su Formazione dell immagine Calibrazione della
Parte 1/4: A.A. 2008-2009 - Corso di Computer Vision Eugenio Rustico rustico@dmi.unict.it D.M.I. - Università di Catania Versione: 30 marzo 2009 5-6 lezioni su Formazione dell immagine Calibrazione della
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Visione Stereo Scopo della visione stereo è ricostruire la struttura di una scena 3D statica a partire da n >= 2 viste diverse - il caso n=2 è l argomento
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Visione Stereo Scopo della visione stereo è ricostruire la struttura di una scena 3D statica a partire da n >= 2 viste diverse - il caso n=2 è l argomento
2. Coordinate omogenee e trasformazioni del piano
 . Coordinate omogenee e trasformazioni del piano Nella prima sezione si è visto come la composizione di applicazioni lineari e di traslazioni porta ad una scomoda combinazione di prodotti matriciali e
. Coordinate omogenee e trasformazioni del piano Nella prima sezione si è visto come la composizione di applicazioni lineari e di traslazioni porta ad una scomoda combinazione di prodotti matriciali e
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Structure From Motion Date m immagini di n punti 3D (fissi) Stimare le m matrici di proiezione P i e gli n vettori X j date le mn corrispondenze x ij SFM
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Structure From Motion Date m immagini di n punti 3D (fissi) Stimare le m matrici di proiezione P i e gli n vettori X j date le mn corrispondenze x ij SFM
Lezione 6 Richiami di Geometria Analitica
 1 Piano cartesiano Lezione 6 Richiami di Geometria Analitica Consideriamo nel piano due rette perpendicolari che si intersecano in un punto O Consideriamo ciascuna di queste rette come retta orientata
1 Piano cartesiano Lezione 6 Richiami di Geometria Analitica Consideriamo nel piano due rette perpendicolari che si intersecano in un punto O Consideriamo ciascuna di queste rette come retta orientata
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
Dal Mondo alla Camera
 Dal Mondo alla Camera Formazione dell immagine Marco Moltisanti Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania moltisanti@dmi.unict.it www.dmi.unict.it/~moltisanti
Dal Mondo alla Camera Formazione dell immagine Marco Moltisanti Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania moltisanti@dmi.unict.it www.dmi.unict.it/~moltisanti
1 S/f. M = A t = A + CT = 1 S f
 Ot Una lente sottile con focale f 50 mm è utilizzata per proiettare su di uno schermo l immagine di un oggetto posto a 5 m. SI determini la posizione T dello schermo e l ingrandimento che si ottiene La
Ot Una lente sottile con focale f 50 mm è utilizzata per proiettare su di uno schermo l immagine di un oggetto posto a 5 m. SI determini la posizione T dello schermo e l ingrandimento che si ottiene La
LA PARABOLA E LA SUA EQUAZIONE
 LA PARABOLA E LA SUA EQUAZIONE Prof. Giovanni Ianne CHE COS È LA PARABOLA DEFINIZIONE Parabola Scegliamo sul piano un punto F e una retta d. Possiamo tracciare sul piano i punti equidistanti da F e da
LA PARABOLA E LA SUA EQUAZIONE Prof. Giovanni Ianne CHE COS È LA PARABOLA DEFINIZIONE Parabola Scegliamo sul piano un punto F e una retta d. Possiamo tracciare sul piano i punti equidistanti da F e da
Geometria analitica del piano pag 32 Adolfo Scimone
 Geometria analitica del piano pag 32 Adolfo Scimone CAMBIAMENTI DI SISTEMA DI RIFERIMENTO Consideriamo il piano cartesiano R 2 con un sistema di riferimento (O,U). Se introduciamo in R 2 un secondo sistema
Geometria analitica del piano pag 32 Adolfo Scimone CAMBIAMENTI DI SISTEMA DI RIFERIMENTO Consideriamo il piano cartesiano R 2 con un sistema di riferimento (O,U). Se introduciamo in R 2 un secondo sistema
La matematica del CAD. Vettori e Matrici
 La matematica del CAD Vettori e Matrici IUAV Disegno Digitale Camillo Trevisan I programmi CAD riducono tutti i problemi geometrici in problemi analitici: la proiezione di un punto su un piano viene, ad
La matematica del CAD Vettori e Matrici IUAV Disegno Digitale Camillo Trevisan I programmi CAD riducono tutti i problemi geometrici in problemi analitici: la proiezione di un punto su un piano viene, ad
1. (Da Medicina e Odontoiatria 2012) Determinare l'area del triangolo che ha come vertici i punti (0,0), (0,1), (13,12) del piano cartesiano:
 Determinare l'area del triangolo che ha come vertici i punti (0,0), (0,1), (13,12) del piano cartesiano:") QUESITI 1 PIANO CARTESIANO 1. (Da Medicina e Odontoiatria 2012) Determinare l'area del triangolo che ha come vertici i punti (0,0), (0,1), (13,12) del piano cartesiano: a) 6 b) 13/2 c) 12 d) 13 e) 78 2.
QUESITI 1 PIANO CARTESIANO 1. (Da Medicina e Odontoiatria 2012) Determinare l'area del triangolo che ha come vertici i punti (0,0), (0,1), (13,12) del piano cartesiano: a) 6 b) 13/2 c) 12 d) 13 e) 78 2.
(x B x A, y B y A ) = (4, 2) ha modulo
 = (4, 2) ha modulo") GEOMETRIA PIANA 1. Esercizi Esercizio 1. Dati i punti A(0, 4), e B(4, ) trovarne la distanza e trovare poi i punti C allineati con A e con B che verificano: (1) AC = CB (punto medio del segmento AB); ()
GEOMETRIA PIANA 1. Esercizi Esercizio 1. Dati i punti A(0, 4), e B(4, ) trovarne la distanza e trovare poi i punti C allineati con A e con B che verificano: (1) AC = CB (punto medio del segmento AB); ()
2^ puntata. la fotocamera. gli obiettivi
 2^ puntata la fotocamera! gli obiettivi L A F O T O C A M E R A come è nata? prima della fotocamera c era la camera oscura con un foro molto piccolo foro stenopeico camera oscura usata per riprodurre pittoricamente
2^ puntata la fotocamera! gli obiettivi L A F O T O C A M E R A come è nata? prima della fotocamera c era la camera oscura con un foro molto piccolo foro stenopeico camera oscura usata per riprodurre pittoricamente
Geometria analitica del piano pag 25 Adolfo Scimone. Equazione della retta perpendicolare ad una retta data passante per un punto
 Geometria analitica del piano pag 5 Adolfo Scimone Equazione della retta perpendicolare ad una retta data passante per un punto Consideriamo una retta r di equazione r: ax by sia P ( x y), un punto del
Geometria analitica del piano pag 5 Adolfo Scimone Equazione della retta perpendicolare ad una retta data passante per un punto Consideriamo una retta r di equazione r: ax by sia P ( x y), un punto del
Studio generale di una conica
 Studio generale di una conica Manlio De Domenico 19 Giugno 2003 Definizione 1 Si definisce conica C un equazione algebrica F (x 1, x 2, x 3 ) = 0 del secondo ordine omogenea. Detta A la matrice simmetrica
Studio generale di una conica Manlio De Domenico 19 Giugno 2003 Definizione 1 Si definisce conica C un equazione algebrica F (x 1, x 2, x 3 ) = 0 del secondo ordine omogenea. Detta A la matrice simmetrica
Equazione cartesiana della parabola con asse di simmetria parallelo all'asse delle ordinate Siano F(x F; y
 LEZIONI PARABOLA Definizione Si definisce parabola il luogo geometrico dei punti del piano equidistanti da un punto fisso,, detto fuoco, e da una retta fissa, d, detta direttrice. La definizione data mette
LEZIONI PARABOLA Definizione Si definisce parabola il luogo geometrico dei punti del piano equidistanti da un punto fisso,, detto fuoco, e da una retta fissa, d, detta direttrice. La definizione data mette
Algebra Lineare (Matematica C.I.), 12.11.13. Sistemi di equazioni lineari. 1. Un equazione lineare in una incognita reale x e un equazione del tipo
, 12.11.13. Sistemi di equazioni lineari. 1. Un equazione lineare in una incognita reale x e un equazione del tipo") Algebra Lineare (Matematica C.I.), 12.11.13 Sistemi di equazioni lineari 1. Un equazione lineare in una incognita reale x e un equazione del tipo ax = b, dove a e b sono numeri reali dati; a e il coefficiente
Algebra Lineare (Matematica C.I.), 12.11.13 Sistemi di equazioni lineari 1. Un equazione lineare in una incognita reale x e un equazione del tipo ax = b, dove a e b sono numeri reali dati; a e il coefficiente
y 5z = 7 y +8z = 10 +3z = 3
 Sistemi lineari Sistemi lineari in tre incognite; esempi tipici Tre equazioni incognite x, y, z Consideriamo il seguente sistema di tre equazioni lineari nelle tre x 2y +6z = 11 x +3y 11z = 18 2x 5y +20z
Sistemi lineari Sistemi lineari in tre incognite; esempi tipici Tre equazioni incognite x, y, z Consideriamo il seguente sistema di tre equazioni lineari nelle tre x 2y +6z = 11 x +3y 11z = 18 2x 5y +20z
Grafica al calcolatore - Computer Graphics
 Grafica al calcolatore - Computer Graphics 5 - Rendering 29/10/12 Grafica 2013 1 Rendering Il termine rendering indica la serie di algoritmi, geometrici e non, a cui si sottopone una data descrizione di
Grafica al calcolatore - Computer Graphics 5 - Rendering 29/10/12 Grafica 2013 1 Rendering Il termine rendering indica la serie di algoritmi, geometrici e non, a cui si sottopone una data descrizione di
Condizione di allineamento di tre punti
 LA RETTA L equazione lineare in x e y L equazione: 0 con,,, e non contemporaneamente nulli, si dice equazione lineare nelle due variabili e. Ogni coppia ; tale che: 0 si dice soluzione dell equazione.
LA RETTA L equazione lineare in x e y L equazione: 0 con,,, e non contemporaneamente nulli, si dice equazione lineare nelle due variabili e. Ogni coppia ; tale che: 0 si dice soluzione dell equazione.
Unità Didattica N 9 : La parabola
 0 Matematica Liceo \ Unità Didattica N 9 La parabola Unità Didattica N 9 : La parabola ) La parabola ad asse verticale ) La parabola ad asse orizzontale 5) Intersezione di una parabola con una retta 6)
0 Matematica Liceo \ Unità Didattica N 9 La parabola Unità Didattica N 9 : La parabola ) La parabola ad asse verticale ) La parabola ad asse orizzontale 5) Intersezione di una parabola con una retta 6)
Coniche - risposte 1.9
 Coniche - risposte. CAMBI DI COORDINATE ) ) cosπ/) sinπ/). a. Rotazione di π/, la matrice di rotazione è = sinπ/) cosπ/) ) ) ) X = Y X = Quindi le formule sono: cioè: Y = X e inversamente Y = = Y X = b.
Coniche - risposte. CAMBI DI COORDINATE ) ) cosπ/) sinπ/). a. Rotazione di π/, la matrice di rotazione è = sinπ/) cosπ/) ) ) ) X = Y X = Quindi le formule sono: cioè: Y = X e inversamente Y = = Y X = b.
Corso di Visione Artificiale. Stereopsi. Samuel Rota Bulò
 Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
RETTE E PIANI NELLO SPAZIO
 VETTORI E GEOMETRIA ANALITICA 1 RETTE E PIANI NELLO SPAZIO Rette e piani in forma cartesiana e parametrica. Parallelismo e perpendicolarità, posizioni reciproche tra rette e piani, distanze. Esercizio
VETTORI E GEOMETRIA ANALITICA 1 RETTE E PIANI NELLO SPAZIO Rette e piani in forma cartesiana e parametrica. Parallelismo e perpendicolarità, posizioni reciproche tra rette e piani, distanze. Esercizio
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
Laboratorio di Ottica, Spettroscopia, Astrofisica
 Università degli Studi di Palermo Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Progetto Lauree Scientifiche Laboratorio di Ottica, Spettroscopia, Astrofisica Antonio Maggio
Università degli Studi di Palermo Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Progetto Lauree Scientifiche Laboratorio di Ottica, Spettroscopia, Astrofisica Antonio Maggio
LE LENTI E L OCCHIO UMANO Prof. Erasmo Modica erasmo@galois.it
 LE LENTI E L OCCHIO UMANO Prof. Erasmo Modica erasmo@galois.it LE LENTI E LE LORO PROPRIETÀ Una lente è uno strumento costituito da un mezzo trasparente delimitato da due superfici curve, oppure da una
LE LENTI E L OCCHIO UMANO Prof. Erasmo Modica erasmo@galois.it LE LENTI E LE LORO PROPRIETÀ Una lente è uno strumento costituito da un mezzo trasparente delimitato da due superfici curve, oppure da una
Schede di e-tutoring sulla geometria analitica
 Schede di e-tutoring sulla geometria analitica 9 aprile 2012 Una retta ha equazione esplicita y = mx + n e in questo caso dalla fisica sappiamo che m fornisce il grado di pendenza della retta e si chiama
Schede di e-tutoring sulla geometria analitica 9 aprile 2012 Una retta ha equazione esplicita y = mx + n e in questo caso dalla fisica sappiamo che m fornisce il grado di pendenza della retta e si chiama
7 Cenni di ottica per la fotografia
 7 Cenni di ottica per la fotografia 7.1 Schematizzazione di un obiettivo fotografico Gli obiettivi fotografici sono generalmente composti da un numero elevato di lenti. Tuttavia per semplicità possiamo
7 Cenni di ottica per la fotografia 7.1 Schematizzazione di un obiettivo fotografico Gli obiettivi fotografici sono generalmente composti da un numero elevato di lenti. Tuttavia per semplicità possiamo
Argomenti Capitolo 1 Richiami
 Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA
 Cognome Nome Matricola FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA Ciarellotto, Esposito, Garuti Prova del 21 settembre 2013 Dire se è vero o falso (giustificare le risposte. Bisogna necessariamente rispondere
Cognome Nome Matricola FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA Ciarellotto, Esposito, Garuti Prova del 21 settembre 2013 Dire se è vero o falso (giustificare le risposte. Bisogna necessariamente rispondere
X = x + 1. X = x + 1
 CONICHE. Esercizi Esercizio. Classificare, ridurre a forma canonica (completando i quadrati), e disegnare le seguenti coniche: γ : x y + x = 0; γ : x + 4x y + = 0; γ 3 : x + y + y + 0 = 0; γ 4 : x + y
CONICHE. Esercizi Esercizio. Classificare, ridurre a forma canonica (completando i quadrati), e disegnare le seguenti coniche: γ : x y + x = 0; γ : x + 4x y + = 0; γ 3 : x + y + y + 0 = 0; γ 4 : x + y
Par_CircoRiassunto2.notebook. February 27, Conoscenza e comprensione pag. 20 LA PARABOLA
 LA PARABOLA Conoscenza e comprensione pag. 20 (SCHEDA RIASSUNTIA) 1) Definisci la parabola come luogo di punti e dai una descrizione delle caratteristiche geometriche di questa curva R. pag. 75: Parabola
LA PARABOLA Conoscenza e comprensione pag. 20 (SCHEDA RIASSUNTIA) 1) Definisci la parabola come luogo di punti e dai una descrizione delle caratteristiche geometriche di questa curva R. pag. 75: Parabola
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Rette
 Analisi Matematica 1 e Matematica 1 Geometria Analitica: Rette Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Nel Piano
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Rette Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Nel Piano
RETTE E PIANI. ove h R. Determinare i valori di h per cui (1) r h e α sono incidenti ed, in tal caso, determinare l angolo ϑ h da essi formato;
 r h e α sono incidenti ed, in tal caso, determinare l angolo ϑ h da essi formato;") RETTE E PIANI Esercizi Esercizio 1. Nello spazio con riferimento cartesiano ortogonale Oxyz si considerino la retta r h ed il piano α rispettivamente di equazioni x = 1 + t r h : y = 1 t α : x + y + z
RETTE E PIANI Esercizi Esercizio 1. Nello spazio con riferimento cartesiano ortogonale Oxyz si considerino la retta r h ed il piano α rispettivamente di equazioni x = 1 + t r h : y = 1 t α : x + y + z
Ingegneria Gestionale - Corso di Algebra lineare e Analisi II anno accademico 2009/2010 ESERCITAZIONE 4.4
 Ingegneria Gestionale - Corso di Algebra lineare e Analisi II anno accademico 9/ ESERCITAZIONE. (Cognome) (Nome) (Numero di matricola) Proposizione Vera Falsa Per due punti distinti di R passa un unica
Ingegneria Gestionale - Corso di Algebra lineare e Analisi II anno accademico 9/ ESERCITAZIONE. (Cognome) (Nome) (Numero di matricola) Proposizione Vera Falsa Per due punti distinti di R passa un unica
Corso di Geometria Ing. Informatica e Automatica Test 1: soluzioni
 Corso di Geometria Ing. Informatica e Automatica Test : soluzioni k Esercizio Data la matrice A = k dipendente dal parametro k, si consideri il k sistema lineare omogeneo AX =, con X = x x. Determinare
Corso di Geometria Ing. Informatica e Automatica Test : soluzioni k Esercizio Data la matrice A = k dipendente dal parametro k, si consideri il k sistema lineare omogeneo AX =, con X = x x. Determinare
I- Visione, lenti, microscopio
 AA 20/202 Corso di Basi Fisiche Prof Tommaso Bellini I- Visione, lenti, microscopio Formare un immagine Ingredienti: -Luce - Supporto dell immagine - retina - pellicola fotografica - sensore macchina fotografica
AA 20/202 Corso di Basi Fisiche Prof Tommaso Bellini I- Visione, lenti, microscopio Formare un immagine Ingredienti: -Luce - Supporto dell immagine - retina - pellicola fotografica - sensore macchina fotografica
Geometria per la ricostruzione tridimensionale da immagini Quando i matematici non entrano in aula
 Geometria per la ricostruzione tridimensionale da immagini Quando i matematici non entrano in aula Cristina Turrini UNIMI Trento, 9 aprile 207 Cristina Turrini (UNIMI) Geometria per la ricostruzione tridimensionale
Geometria per la ricostruzione tridimensionale da immagini Quando i matematici non entrano in aula Cristina Turrini UNIMI Trento, 9 aprile 207 Cristina Turrini (UNIMI) Geometria per la ricostruzione tridimensionale
CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA
 CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA II PROVA DI ACCERTAMENTO, FILA A GEOMETRIA 19/06/008 Esercizio 0.1. Si consideri il seguente endomorfismo di R 4 T (x, y, z, w) = ( x + y + z + w, y + z,
CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA II PROVA DI ACCERTAMENTO, FILA A GEOMETRIA 19/06/008 Esercizio 0.1. Si consideri il seguente endomorfismo di R 4 T (x, y, z, w) = ( x + y + z + w, y + z,
Quaderno per il recupero del debito MATEMATICA ANNO SCOLASTICO 2016/2017 Prof.ssa Migliaccio Gabriella CLASSE III
 Quaderno per il recupero del debito MATEMATICA ANNO SCOLASTICO 016/017 Prof.ssa Migliaccio Gabriella CLASSE III Gli esercizi vanno svolti e consegnati, anche su un quaderno, il giorno dell esame per il
Quaderno per il recupero del debito MATEMATICA ANNO SCOLASTICO 016/017 Prof.ssa Migliaccio Gabriella CLASSE III Gli esercizi vanno svolti e consegnati, anche su un quaderno, il giorno dell esame per il
Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I)
") Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I) Luigi De Giovanni Giacomo Zambelli 1 Problemi di programmazione lineare Un problema
Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I) Luigi De Giovanni Giacomo Zambelli 1 Problemi di programmazione lineare Un problema
Corso di Geometria BIAR, BSIR Esercizi 8: soluzioni
 Corso di Geometria 2010-11 BIAR, BSIR Esercizi 8: soluzioni Esercizio 1. a) Disegnare la retta r di equazione cartesiana x 2y 4 = 0. b) Determinare l equazione cartesiana della retta r 1 passante per P
Corso di Geometria 2010-11 BIAR, BSIR Esercizi 8: soluzioni Esercizio 1. a) Disegnare la retta r di equazione cartesiana x 2y 4 = 0. b) Determinare l equazione cartesiana della retta r 1 passante per P
= (cioè le due terne di numeri direttori ( devono essere ) proporzionali). Tale uguaglianza non è verificata, poiché risulta ρ
 proporzionali). Tale uguaglianza non è verificata, poiché risulta ρ") Alcuni esercizi sullo spazio euclideo R Nel seguito R indicherà lo spazio euclideo tridimensionale standard, dotato del riferimento cartesiano naturale (pag 56-57 del libro Nota: gli esercizi proposti
Alcuni esercizi sullo spazio euclideo R Nel seguito R indicherà lo spazio euclideo tridimensionale standard, dotato del riferimento cartesiano naturale (pag 56-57 del libro Nota: gli esercizi proposti
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche
 Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Coniche
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Coniche
Risoluzione di sistemi lineari
 Risoluzione di sistemi lineari Teorema (Rouché-Capelli) Dato il sistema di m equazioni in n incognite Ax = b, con A M at(m, n) b R n x R n [A b] si ha che: matrice dei coefficienti, vettore dei termini
Risoluzione di sistemi lineari Teorema (Rouché-Capelli) Dato il sistema di m equazioni in n incognite Ax = b, con A M at(m, n) b R n x R n [A b] si ha che: matrice dei coefficienti, vettore dei termini
Fila A Per ogni quesito una sola delle quattro affermazioni e' corretta: indicala con una crocetta e riporta la risposta sul foglio delle risposte.
 Fila A Per ogni quesito una sola delle quattro affermazioni e' corretta: indicala con una crocetta e riporta la risposta sul foglio delle risposte. 1. La retta di equazione 2x+3y-1=0 a) ha coefficiente
Fila A Per ogni quesito una sola delle quattro affermazioni e' corretta: indicala con una crocetta e riporta la risposta sul foglio delle risposte. 1. La retta di equazione 2x+3y-1=0 a) ha coefficiente
DALL'OCCHIO ALLA REFLEX
 DALL'OCCHIO ALLA REFLEX STRUMENTO DELLA VISIONE Operazioni ottiche chimiche nervose DALL'OCCHIO ALLA REFLEX Formazione di un'immagine Lettura di un'immagine I raggi di luce generati da una fonte luminosa
DALL'OCCHIO ALLA REFLEX STRUMENTO DELLA VISIONE Operazioni ottiche chimiche nervose DALL'OCCHIO ALLA REFLEX Formazione di un'immagine Lettura di un'immagine I raggi di luce generati da una fonte luminosa
Ministero della Difesa Direzione Generale per il Personale Militare I Reparto
 Ministero della Difesa Direzione Generale per il Personale Militare I Reparto Concorso Interno, per titoli ed esami, a 300 posti per l ammissione al 20 corso di aggiornamento e formazione professionale
Ministero della Difesa Direzione Generale per il Personale Militare I Reparto Concorso Interno, per titoli ed esami, a 300 posti per l ammissione al 20 corso di aggiornamento e formazione professionale
ax 1 + bx 2 + c = 0, r : 2x 1 3x 2 + 1 = 0.
 . Rette in R ; circonferenze. In questo paragrafo studiamo le rette e le circonferenze in R. Ci sono due modi per descrivere una retta in R : mediante una equazione cartesiana oppure mediante una equazione
. Rette in R ; circonferenze. In questo paragrafo studiamo le rette e le circonferenze in R. Ci sono due modi per descrivere una retta in R : mediante una equazione cartesiana oppure mediante una equazione
Esercizi svolti. Geometria analitica: rette e piani
 Esercizi svolti. Sistemi di riferimento e vettori. Dati i vettori v = i + j k, u =i + j + k determinare:. il vettore v + u ;. gli angoli formati da v e u;. i vettore paralleli alle bisettrici di tali angoli;
Esercizi svolti. Sistemi di riferimento e vettori. Dati i vettori v = i + j k, u =i + j + k determinare:. il vettore v + u ;. gli angoli formati da v e u;. i vettore paralleli alle bisettrici di tali angoli;
Note di geometria analitica nel piano
 Note di geometria analitica nel piano e-mail: maurosaita@tiscalinet.it Versione provvisoria. Novembre 2015. 1 Indice 1 Punti e vettori spiccati dall origine 3 1.1 Coordinate......................................
Note di geometria analitica nel piano e-mail: maurosaita@tiscalinet.it Versione provvisoria. Novembre 2015. 1 Indice 1 Punti e vettori spiccati dall origine 3 1.1 Coordinate......................................
SPECCHI. Dalla posizione dell'immagine non emergono raggi luminosi; essa si trova sull'immaginario prolungamento dei raggi di luce riflessa.
 SPECCHI SPECCHI PIANI Per specchio si intende un dispositivo la cui superficie è in grado di riflettere immagini di oggetti posti davanti a essa. Uno specchio è piano se la superficie riflettente è piana.
SPECCHI SPECCHI PIANI Per specchio si intende un dispositivo la cui superficie è in grado di riflettere immagini di oggetti posti davanti a essa. Uno specchio è piano se la superficie riflettente è piana.
CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA
 CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA FOGLIO DI ESERCIZI 1 GEOMETRIA 2009/10 Esercizio 1.1 (2.2). Determinare l equazione parametrica e Cartesiana della retta dello spazio (a) Passante per i
CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA FOGLIO DI ESERCIZI 1 GEOMETRIA 2009/10 Esercizio 1.1 (2.2). Determinare l equazione parametrica e Cartesiana della retta dello spazio (a) Passante per i
Studio generale di una quadrica
 Studio generale di una quadrica Manlio De Domenico 19 Giugno 2003 Definizione 1 Si definisce quadrica Q un equazione algebrica F (x 1, x 2, x 3, x 4 ) = 0 del secondo ordine omogenea. Detta A la matrice
Studio generale di una quadrica Manlio De Domenico 19 Giugno 2003 Definizione 1 Si definisce quadrica Q un equazione algebrica F (x 1, x 2, x 3, x 4 ) = 0 del secondo ordine omogenea. Detta A la matrice
Circonferenze del piano
 Circonferenze del piano 1 novembre 1 Circonferenze del piano 1.1 Definizione Una circonferenza è il luogo dei punti equidistanti da un punto fisso, detto centro. La distanza di un qualunque punto della
Circonferenze del piano 1 novembre 1 Circonferenze del piano 1.1 Definizione Una circonferenza è il luogo dei punti equidistanti da un punto fisso, detto centro. La distanza di un qualunque punto della
Anno 3 Equazione dell'ellisse
 Anno Equazione dell'ellisse 1 Introduzione In questa lezione affronteremo una serie di problemi che ci chiederanno di determinare l equazione di un ellisse sotto certe condizioni. Al termine della lezione
Anno Equazione dell'ellisse 1 Introduzione In questa lezione affronteremo una serie di problemi che ci chiederanno di determinare l equazione di un ellisse sotto certe condizioni. Al termine della lezione
LENTI SOTTILI. Le lenti sottili sono gli strumenti ottici più importanti tra quelli più semplici.
 LENTI SOTTILI Chiamiamo lente un qualsiasi corpo trasparente limitato da due superfici curve o da una superficie piana ed una curva, in grado di trasmettere un fascio di luce focalizzandolo in modo da
LENTI SOTTILI Chiamiamo lente un qualsiasi corpo trasparente limitato da due superfici curve o da una superficie piana ed una curva, in grado di trasmettere un fascio di luce focalizzandolo in modo da
2. APPUNTI SUI FASCI DI CIRCONFERENZE (raccolti dal prof. G. Traversi)
") 2. APPUNTI SUI FASCI DI CIRCONFERENZE (raccolti dal prof. G. Traversi) La circonferenza è la curva di 2^ grado che viene individuata univocamente da tre punti non allineati e possiede la seguente proprietà:
2. APPUNTI SUI FASCI DI CIRCONFERENZE (raccolti dal prof. G. Traversi) La circonferenza è la curva di 2^ grado che viene individuata univocamente da tre punti non allineati e possiede la seguente proprietà:
TRASFORMAZIONI GEOMETRICHE
 TRASFORMAZIONI GEOMETRICHE Def. Una trasformazione geometrica T tra i punti di un piano è una corrispondenza biunivoca che ad ogni punto P del piano associa uno e un solo punto P' appartenente al piano
TRASFORMAZIONI GEOMETRICHE Def. Una trasformazione geometrica T tra i punti di un piano è una corrispondenza biunivoca che ad ogni punto P del piano associa uno e un solo punto P' appartenente al piano
La lunghezza dei vettori e legata alle operazioni sui vettori nel modo seguente: Consideriamo due vettori v, w e il vettore v + w loro somma.
 Matematica II, 20.2.. Lunghezza di un vettore nel piano Consideriamo il piano vettoriale geometrico P O. Scelto un segmento come unita, possiamo parlare di lunghezza di un vettore v P O rispetto a tale
Matematica II, 20.2.. Lunghezza di un vettore nel piano Consideriamo il piano vettoriale geometrico P O. Scelto un segmento come unita, possiamo parlare di lunghezza di un vettore v P O rispetto a tale
Corso di Visione Artificiale. Filtri parte II. Samuel Rota Bulò
 Corso di Visione Artificiale Filtri parte II Samuel Rota Bulò Numeri complessi parte reale parte immaginaria in coordinate polari complesso coniugato formula di Eulero Trasformata di Fourier discreta (DFT)
Corso di Visione Artificiale Filtri parte II Samuel Rota Bulò Numeri complessi parte reale parte immaginaria in coordinate polari complesso coniugato formula di Eulero Trasformata di Fourier discreta (DFT)
Vettori e geometria analitica in R 3 1 / 25
 Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
Fissiamo nel piano un sistema di riferimento cartesiano ortogonale O, x, y, u.
 Fissiamo nel piano un sistema di riferimento cartesiano ortogonale O, x, y, u. Definizione Una conica è il luogo dei punti, propri o impropri, reali o immaginari, che con le loro coordinate omogenee (x,
Fissiamo nel piano un sistema di riferimento cartesiano ortogonale O, x, y, u. Definizione Una conica è il luogo dei punti, propri o impropri, reali o immaginari, che con le loro coordinate omogenee (x,
Corso di Geometria BIAR, BSIR Esercizi 10: soluzioni
 Corso di Geometria 2010-11 BIAR, BSIR Esercizi 10: soluzioni 1 Geometria dello spazio Esercizio 1. Dato il punto P 0 = ( 1, 0, 1) e il piano π : x + y + z 2 = 0, determinare: a) Le equazioni parametriche
Corso di Geometria 2010-11 BIAR, BSIR Esercizi 10: soluzioni 1 Geometria dello spazio Esercizio 1. Dato il punto P 0 = ( 1, 0, 1) e il piano π : x + y + z 2 = 0, determinare: a) Le equazioni parametriche
LA CIRCONFERENZA La circonferenza è il luogo geometrico dei punti equidistanti da un punto C, detto centro.
 Geometria Analitica Le coniche Queste curve si chiamano coniche perché sono ottenute tramite l'intersezione di una superficie conica con un piano. Si possono definire tutte come luoghi geometrici e, di
Geometria Analitica Le coniche Queste curve si chiamano coniche perché sono ottenute tramite l'intersezione di una superficie conica con un piano. Si possono definire tutte come luoghi geometrici e, di
1.1 Coordinate sulla retta e nel piano; rette nel piano
 1 Sistemi lineari 11 Coordinate sulla retta e nel piano; rette nel piano Coordinate sulla retta Scelti su una retta un primo punto O (origine) ed un diverso secondo punto U (unita ), l identificazione
1 Sistemi lineari 11 Coordinate sulla retta e nel piano; rette nel piano Coordinate sulla retta Scelti su una retta un primo punto O (origine) ed un diverso secondo punto U (unita ), l identificazione
Trapani. Dispensa di Geometria, x 1 x 2.x n. (x 1 y 1 ) (x n y n ) 2.
 (x n y n ) 2.") 2006 Trapani Dispensa di Geometria, 1 Distanze Siano P e Q punti di R n con P di coordinate allora la distanza tra P e Q e P Q = x 1 x 2 x n (x 1 y 1 ) 2 + (x n y n ) 2 e Q di coordinate Siano Σ 1 e Σ
2006 Trapani Dispensa di Geometria, 1 Distanze Siano P e Q punti di R n con P di coordinate allora la distanza tra P e Q e P Q = x 1 x 2 x n (x 1 y 1 ) 2 + (x n y n ) 2 e Q di coordinate Siano Σ 1 e Σ
LEZIONE 3. a + b + 2c + e = 1 b + d + g = 0 3b + f + 3g = 2. a b c d e f g
 LEZIONE 3 3.. Matrici fortemente ridotte per righe. Nella precedente lezione abbiamo introdotto la nozione di soluzione di un sistema di equazioni lineari. In questa lezione ci poniamo il problema di descrivere
LEZIONE 3 3.. Matrici fortemente ridotte per righe. Nella precedente lezione abbiamo introdotto la nozione di soluzione di un sistema di equazioni lineari. In questa lezione ci poniamo il problema di descrivere
Per le risposte utilizza gli spazi predisposti. Quando richiesto, il procedimento va esposto brevemente, ma in maniera comprensibile.
 COGNOME............................... NOME..................................... Punti ottenuti Esame di geometria Scrivi cognome e nome negli spazi predisposti in ciascuno dei tre fogli. Per ogni domanda
COGNOME............................... NOME..................................... Punti ottenuti Esame di geometria Scrivi cognome e nome negli spazi predisposti in ciascuno dei tre fogli. Per ogni domanda
Geometria Analitica Domande, Risposte & Esercizi
 Geometria Analitica Domande, Risposte & Esercizi La parabola. Dare la definizione di parabola come luogo di punti La parabola è un luogo di punti, è cioè un insieme di punti del piano che verificano tutti
Geometria Analitica Domande, Risposte & Esercizi La parabola. Dare la definizione di parabola come luogo di punti La parabola è un luogo di punti, è cioè un insieme di punti del piano che verificano tutti
Rette e piani in R 3
 Rette e piani in R 3 In questa dispensa vogliamo introdurre in modo elementare rette e piani nello spazio R 3 (si faccia riferimento anche al testo Algebra Lineare di S. Lang). 1 Rette in R 3 Vogliamo
Rette e piani in R 3 In questa dispensa vogliamo introdurre in modo elementare rette e piani nello spazio R 3 (si faccia riferimento anche al testo Algebra Lineare di S. Lang). 1 Rette in R 3 Vogliamo
Esercizi geometria analitica nello spazio. Corso di Laurea in Informatica. Docente: Andrea Loi. Correzione
 Esercizi geometria analitica nello spazio Corso di Laurea in Informatica Docente: Andrea Loi Correzione 1. Denotiamo con P 1, P 13, P 3, P 1, P, P 3, P i simmetrici di un punto P rispetto ai piani coordinati
Esercizi geometria analitica nello spazio Corso di Laurea in Informatica Docente: Andrea Loi Correzione 1. Denotiamo con P 1, P 13, P 3, P 1, P, P 3, P i simmetrici di un punto P rispetto ai piani coordinati
La circonferenza e la sua equazione
 La circonferenza e la sua equazione 1. I termini Ricordiamo che la circonferenza è una linea chiusa del piano costituita da tutti e soli i punti che hanno una data distanza da un punto fissato. In altri
La circonferenza e la sua equazione 1. I termini Ricordiamo che la circonferenza è una linea chiusa del piano costituita da tutti e soli i punti che hanno una data distanza da un punto fissato. In altri
Prodotto scalare e ortogonalità
 Prodotto scalare e ortogonalità 12 Novembre 1 Il prodotto scalare 1.1 Definizione Possiamo estendere la definizione di prodotto scalare, già data per i vettori del piano, ai vettori dello spazio. Siano
Prodotto scalare e ortogonalità 12 Novembre 1 Il prodotto scalare 1.1 Definizione Possiamo estendere la definizione di prodotto scalare, già data per i vettori del piano, ai vettori dello spazio. Siano
EQUAZIONE DELLA RETTA
 EQUAZIONE DELLA RETTA EQUAZIONE DEGLI ASSI L equazione dell asse x è 0. L equazione dell asse y è 0. EQUAZIONE DELLE RETTE PARALLELE AGLI ASSI L equazione di una retta r parallela all asse x è cioè è uguale
EQUAZIONE DELLA RETTA EQUAZIONE DEGLI ASSI L equazione dell asse x è 0. L equazione dell asse y è 0. EQUAZIONE DELLE RETTE PARALLELE AGLI ASSI L equazione di una retta r parallela all asse x è cioè è uguale
1 Cambiamenti di riferimento nel piano
 1 Cambiamenti di riferimento nel piano Siano date due basi ortonormali ordinate di V : B = ( i, j) e B = ( i, j ) e supponiamo che i = a i + b j j = c i + d j allora per un generico vettore v V abbiamo
1 Cambiamenti di riferimento nel piano Siano date due basi ortonormali ordinate di V : B = ( i, j) e B = ( i, j ) e supponiamo che i = a i + b j j = c i + d j allora per un generico vettore v V abbiamo
FUNZIONI ELEMENTARI Funzione retta
 1 FUNZIONI ELEMENTARI Funzione retta L equazione generale della funzione retta è y = a x + b dove a, b sono numeri reali fissati. Il termine b si chiama termine noto e dà l ordinata dell intersezione tra
1 FUNZIONI ELEMENTARI Funzione retta L equazione generale della funzione retta è y = a x + b dove a, b sono numeri reali fissati. Il termine b si chiama termine noto e dà l ordinata dell intersezione tra
UNITÀ DIDATTICA 5 LA RETTA
 UNITÀ DIDATTICA 5 LA RETTA 5.1 - La retta Equazione generica della retta Dalle considerazioni emerse nel precedente capitolo abbiamo compreso come una funzione possa essere rappresentata da un insieme
UNITÀ DIDATTICA 5 LA RETTA 5.1 - La retta Equazione generica della retta Dalle considerazioni emerse nel precedente capitolo abbiamo compreso come una funzione possa essere rappresentata da un insieme
Geometria analitica del piano pag 12 Adolfo Scimone
 Geometria analitica del piano pag 12 Adolfo Scimone Fasci di rette Siano r e r' due rette distinte di equazioni r: ax + by + c r': a' x + b' y + c' Consideriamo la retta combinazione lineare delle due
Geometria analitica del piano pag 12 Adolfo Scimone Fasci di rette Siano r e r' due rette distinte di equazioni r: ax + by + c r': a' x + b' y + c' Consideriamo la retta combinazione lineare delle due
Parte 12b. Riduzione a forma canonica
 Parte 2b. Riduzione a forma canonica A. Savo Appunti del Corso di Geometria 202-3 Indice delle sezioni. Coniche, 2. Esempio di riduzione, 4 3. Teoremi fondamentali, 6 4. Come determinare l equazione canonica,
Parte 2b. Riduzione a forma canonica A. Savo Appunti del Corso di Geometria 202-3 Indice delle sezioni. Coniche, 2. Esempio di riduzione, 4 3. Teoremi fondamentali, 6 4. Come determinare l equazione canonica,
origine asse delle ascisse unità di misura e orientamento sull asse delle ascisse
 PIANO CARTESIANO Sia f: A R R, il grafico di f è un sottoinsieme del prodotto cartesiano RxR = R 2 Costruiamo una corrispondenza biunivoca tra i punti del piano euclideo e le coppie di numeri reali: 1-
PIANO CARTESIANO Sia f: A R R, il grafico di f è un sottoinsieme del prodotto cartesiano RxR = R 2 Costruiamo una corrispondenza biunivoca tra i punti del piano euclideo e le coppie di numeri reali: 1-
Coordiante omogenee e proiezioni
 CAPITOLO 15 Coordiante omogenee e proiezioni Esercizio 15.1. Utilizzando le coordinate omogenee, determinare l equazione della retta r passante per i punti A(2,) e B( 1,0) e della retta s passante per
CAPITOLO 15 Coordiante omogenee e proiezioni Esercizio 15.1. Utilizzando le coordinate omogenee, determinare l equazione della retta r passante per i punti A(2,) e B( 1,0) e della retta s passante per
Ottica geometrica. Propagazione per raggi luminosi (pennello di luce molto sottile)
") Ottica geometrica Propagazione per raggi luminosi (pennello di luce molto sottile) All interno di un mezzo omogeneo la propagazione e rettilinea: i raggi luminosi sono pertanto rappresentati da tratti
Ottica geometrica Propagazione per raggi luminosi (pennello di luce molto sottile) All interno di un mezzo omogeneo la propagazione e rettilinea: i raggi luminosi sono pertanto rappresentati da tratti
Modello della Telecamera, Calibrazione e Rettificazione
 A.A. 2010/2011 Modello della Telecamera, Calibrazione e Rettificazione Proiezione prospettica Consideriamo un punto dello spazio 3D, M=[x,y,z] T, le cui coordinate sono espresse nel sistema di riferimento
A.A. 2010/2011 Modello della Telecamera, Calibrazione e Rettificazione Proiezione prospettica Consideriamo un punto dello spazio 3D, M=[x,y,z] T, le cui coordinate sono espresse nel sistema di riferimento
GIOCARE CON LA LUCE LA CAMERA OSCURA: DALL OTTICA ALL ARTE E ALLA FOTOGRAFIA
 GIOCARE CON LA LUCE LA CAMERA OSCURA: DALL OTTICA ALL ARTE E ALLA FOTOGRAFIA Tutor: Alberto Petralia, Daniele Murra E-mail: alberto.petralia@enea.it, daniele.murra@enea.it Introduzione all argomento La
GIOCARE CON LA LUCE LA CAMERA OSCURA: DALL OTTICA ALL ARTE E ALLA FOTOGRAFIA Tutor: Alberto Petralia, Daniele Murra E-mail: alberto.petralia@enea.it, daniele.murra@enea.it Introduzione all argomento La
Esercizi per Geometria II Geometria euclidea e proiettiva
 Esercizi per Geometria II Geometria euclidea e proiettiva Filippo F. Favale 8 aprile 014 Esercizio 1 Si consideri E dotato di un riferimento cartesiano ortonormale di coordinate (x, y) e origine O. Si
Esercizi per Geometria II Geometria euclidea e proiettiva Filippo F. Favale 8 aprile 014 Esercizio 1 Si consideri E dotato di un riferimento cartesiano ortonormale di coordinate (x, y) e origine O. Si
SIMMETRIE NEL PIANO CARTESIANO
 Simmetrie nel piano cartesiano - Marzo 011 SIMMETRIE NEL PIANO CARTESIANO SIMMETRIE RISPETTO AGLI ASSI CARTESIANI ASSE X: P ( x,y ) a P1 ( x, y ) ; punto medio: M1 ( x,0) ASSE Y: P ( x,y ) a P ( x, y ),
Simmetrie nel piano cartesiano - Marzo 011 SIMMETRIE NEL PIANO CARTESIANO SIMMETRIE RISPETTO AGLI ASSI CARTESIANI ASSE X: P ( x,y ) a P1 ( x, y ) ; punto medio: M1 ( x,0) ASSE Y: P ( x,y ) a P ( x, y ),
Geometria analitica: rette e piani
 Geometria analitica: rette e piani Equazioni del piano Intersezioni di piani. Rette nello spazio Fasci di piani e rette Intersezioni fra piani e rette Piani e rette ortogonali Piani di forma parametrica
Geometria analitica: rette e piani Equazioni del piano Intersezioni di piani. Rette nello spazio Fasci di piani e rette Intersezioni fra piani e rette Piani e rette ortogonali Piani di forma parametrica
L emulsione fotosensibile. L immagine invertita
 Pag. 17 L emulsione fotosensibile Strato antigraffio Gelatina con cristalli di alogenuro d argento Supporto in acetato di cellulosa Strato antigraffio Sezione di una pellicola fotografica bianco e nero
Pag. 17 L emulsione fotosensibile Strato antigraffio Gelatina con cristalli di alogenuro d argento Supporto in acetato di cellulosa Strato antigraffio Sezione di una pellicola fotografica bianco e nero
II Università degli Studi di Roma
 Versione preliminare gennaio TOR VERGATA II Università degli Studi di Roma Dispense di Geometria. Capitolo 3. 7. Coniche in R. Nel Capitolo I abbiamo visto che gli insiemi di punti P lineare di primo grado
Versione preliminare gennaio TOR VERGATA II Università degli Studi di Roma Dispense di Geometria. Capitolo 3. 7. Coniche in R. Nel Capitolo I abbiamo visto che gli insiemi di punti P lineare di primo grado
GAAL: Capitolo dei prodotti scalari
 GAAL: Capitolo dei prodotti scalari Teorema di Rappresentazione rappresentabile Aggiunto Autoaggiunto Unitariamente diagonalizzabile Teorema spettrale reale Accoppiamento Canonico Forme bilineari Prodotti
GAAL: Capitolo dei prodotti scalari Teorema di Rappresentazione rappresentabile Aggiunto Autoaggiunto Unitariamente diagonalizzabile Teorema spettrale reale Accoppiamento Canonico Forme bilineari Prodotti
LA RETTA. La retta è un insieme illimitato di punti che non ha inizio, né fine.
 LA RETTA La retta è un insieme illimitato di punti che non ha inizio, né fine. Proprietà: Per due punti del piano passa una ed una sola retta. Nel precedente modulo abbiamo visto che ad ogni punto del
LA RETTA La retta è un insieme illimitato di punti che non ha inizio, né fine. Proprietà: Per due punti del piano passa una ed una sola retta. Nel precedente modulo abbiamo visto che ad ogni punto del
Introduciamo il sistema di riferimento indicato in figura b) con F 1 = ( f, 0) ed F 2 = (f, 0). Se P = (x, y) la condizione (1) fornisce
 con F 1 = ( f, 0) ed F 2 = (f, 0). Se P = (x, y) la condizione (1) fornisce") 1 L ellisse 1.1 Definizione Consideriamo due punti F 1 ed F 2 e sia 2f la loro distanza. L ellisse è il luogo dei punti P tali che la somma delle distanze PF 1 e PF 2 da F 1 ed F 2 è costante. Se indichiamo
1 L ellisse 1.1 Definizione Consideriamo due punti F 1 ed F 2 e sia 2f la loro distanza. L ellisse è il luogo dei punti P tali che la somma delle distanze PF 1 e PF 2 da F 1 ed F 2 è costante. Se indichiamo
RIFLESSIONE TOTALE, DIOTTRO
 RIFLESSIONE TOTALE, DIOTTRO 11.1. In un parallelepipedo di quarzo (n q = 1.553) è scavato un cilindro di raggio R = 10 cm ripieno di acetone (n a = 1.358). Un fascio uniforme di luce di sezione LxL = 20x20
RIFLESSIONE TOTALE, DIOTTRO 11.1. In un parallelepipedo di quarzo (n q = 1.553) è scavato un cilindro di raggio R = 10 cm ripieno di acetone (n a = 1.358). Un fascio uniforme di luce di sezione LxL = 20x20
2 2 2 A = Il Det(A) = 2 quindi la conica è non degenere, di rango 3.
 = 2 quindi la conica è non degenere, di rango 3.") Studio delle coniche Ellisse Studiare la conica di equazione 2x 2 + 4xy + y 2 4x 2y + 2 = 0. Per prima cosa dobbiamo classificarla. La matrice associata alla conica è: 2 2 2 A = 2 2 2 Il DetA = 2 quindi
Studio delle coniche Ellisse Studiare la conica di equazione 2x 2 + 4xy + y 2 4x 2y + 2 = 0. Per prima cosa dobbiamo classificarla. La matrice associata alla conica è: 2 2 2 A = 2 2 2 Il DetA = 2 quindi
Esercitazione 6 - Soluzione
 Anno Accademico 28-29 Corso di Algebra Lineare e Calcolo Numerico per Ingegneria Meccanica Esercitazione 6 - Soluzione Immagine, nucleo. Teorema di Rouché-Capelli. Esercizio Sia L : R 3 R 3 l applicazione
Anno Accademico 28-29 Corso di Algebra Lineare e Calcolo Numerico per Ingegneria Meccanica Esercitazione 6 - Soluzione Immagine, nucleo. Teorema di Rouché-Capelli. Esercizio Sia L : R 3 R 3 l applicazione
1.4 Geometria analitica
 1.4 Geometria analitica IL PIANO CARTESIANO Per definire un riferimento cartesiano nel piano euclideo prendiamo: Un punto detto origine i Due rette orientate passanti per. ii Due punti e per definire le
1.4 Geometria analitica IL PIANO CARTESIANO Per definire un riferimento cartesiano nel piano euclideo prendiamo: Un punto detto origine i Due rette orientate passanti per. ii Due punti e per definire le