ESERCIZI GEOMETRIA FILE N. 7: FORMA NORMALE DI JORDAN. PRODOTTI SCALARI. SPAZI VETTORIALI EUCLIDEI, I. 1. Forma normale di Jordan
|
|
|
- Miranda Fumagalli
- 4 anni fa
- Visualizzazioni
Transcript
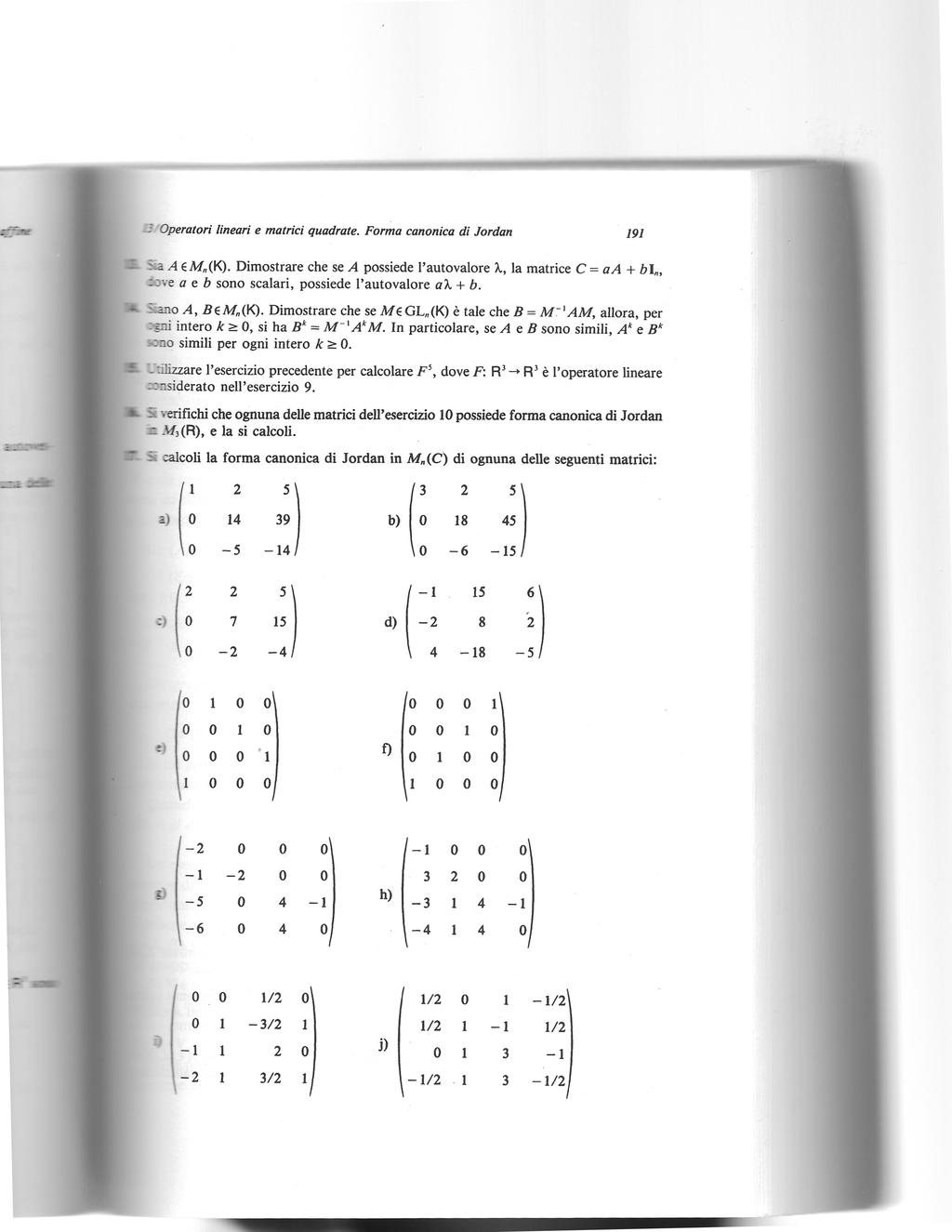
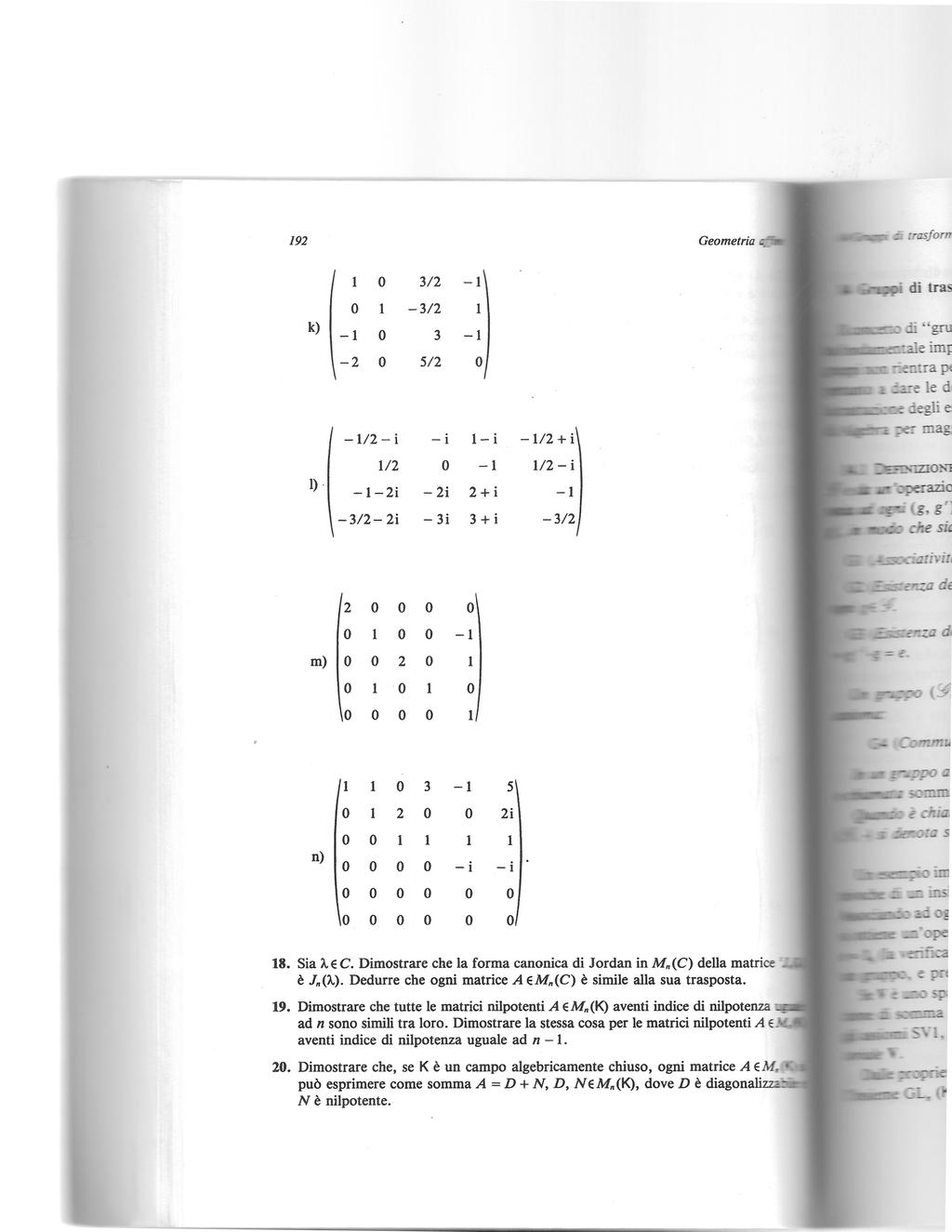
1 ESERCIZI GEOMETRIA FILE N. 7: FORMA NORMALE DI JORDAN. PRODOTTI SCALARI. SPAZI VETTORIALI EUCLIDEI, I. Forma normale di Jordan Es... Esercizi da n. 7 a n. 20 alla fine della Sezione 3 del libro [G] di Edoardo Sernesi (vedi pagina successiva). Es..2. (a) Descrivere l insieme di tutte le matrici 2 2 nilpotenti a coe (suggerimento: usare determinante e traccia). (b) Elencare tutte le matrici 2 2 di rango apple acoe cientiinz 3. (c) Elencare tutte le matrici 2 2acoe cientiinz 3 nilpotenti. cienti in un campo K 2. Prodotti scalari Es. 2.. Denotiamo X =(x,x 2 )ey =(y,y 2 ). Per ciascuno dei casi seguenti stabilire se (X, Y ) è un prodotto scalare su R 2. In caso negativo specificare quali assiomi non sono soddisfatti. (a) (X, Y )=4x y +2x y 2 +2x 2 y + x 2 y 2. (b) (X, Y )=4x y + x y 2 + x 2 y + x 2 y 2. (c) (X, Y )=4x y +3x y 2 +3x 2 y +2x 2 y 2. Es Denotiamo X =(x,x 2,x 3 )ey =(y,y 2,y 3 ). Per ciascuno dei casi seguenti stabilire se (X, Y ) è un prodotto scalare su R 3. In caso negativo specificare quali assiomi non sono soddisfatti. (a) (X, Y )=5x y + x y 2 + x 2 y 4x y 3 4x 3 y + x 2 y 2 2x 2 y 3 2x 3 y 2 +5x 3 y 3. (b) (X, Y )=6x y + x y 2 + x 2 y 3x y 3 3x 3 y + x 2 y 2 2x 2 y 3 2x 3 y 2 +6x 3 y 3. Es Denotiamo X =(x,...,x n )ey =(y,...,x n ). Per ciascuno dei casi seguenti stabilire se (X, Y ) è un prodotto scalare su R n. In caso negativo specificare quali assiomi non sono soddisfatti. (a) (X, Y )=( P n i= x i)( P n j= y j). (b) (X, Y )= P n i= x iy i. (c) (X, Y )=( P n i= x2 i y2 i ) 2. (d) (X, Y )= P n i= (x i + y i ) 2 ( P n i= x2 i ) (P n i= y2 i ). Es In quali dei seguenti casi (P, Q) definisce un prodotto scalare sullo spazio vettoriale R[X] apple2? In caso negativo specificare quali assiomi non sono soddisfatti. (a) (P, Q) =P (0)Q(0) + P ()Q(). (b) (P, Q) =P ( )Q( ) + P (0)Q(0) + P ()Q(). (c) (P, Q) =P ()Q() + P 0 ()Q 0 () + P 00 ()Q 00 (). (d) (P, Q) =P ()Q() + P 0 ()Q 0 ().
2 2ESERCIZI GEOMETRIA FILE N. 7 : FORMA NORMALE DI JORDAN. PRODOTTI SCALARI. SPAZI VETTORIALI EUCL (e) (P, Q) =( R P )(R Q). (f) (P, Q) =(R P 0 Q 0 ). Es Siano x, x n+ 2 R, tutti diversi tra loro. Per P, Q 2 R[X] applen definiamo (P, Q) = P n+ i= P (x i)q(x i ). Dimostrare che è un prodotto scalare su R[X] applen. Che succede se invece usiamo la stessa definizione ma, invece di prendere n + numeri reali ne prendiamo di meno? E se ne prendiamo di più? 3. spazi vettoriali euclidei, I Es. 3.. Per ciascuno dei casi dell esercizio 2.4 in cui (P, Q) è un prodotto scalare: (i) esibire una base ortogonale dello spazio vettoriale euclideo R[X] apple2 munito di quel prodotto scalare applicando il metodo di Gram-Schmidt alla base {,x,x 2 }. (ii) Calcolare una base del sottospazio vettoriale <x+>?. (ii) Calcolare la proiezione ortogonale di x 2 lungo x +. Es In R 3, munito del prodotto scalare ordinario, sia {u, u 2, u 3 } una base ortogonale tale che u = 2, u 2 = p 2, u 3 = p 3. Sia inoltre v = u + u 2 + u 3 e, per i =, 2, 3, denotiamo i l angolo tra v e u i. (a) Calcolare cos i per i =, 2, 3. (b) Calcolare u ^ v e u ^ u 2. (c) Calcolare v (u ^ u 2 ). Es In R 3, munito del prodotto scalare ordinario, consideriamo u =(, 2, 2) e v =(0, 3, 4). Esibire un vettore w 2< u, v > tale che w formi un angolo di /3 con u. (Suggerimento: trovare un riferimento ortonormale del sottospazio U =< u, v > della forma ( u u, z). Allora i versori w = cos 3 u u ± sin 3 z) soddisfano alla richiesta).
3
4
5 ESERCIZI GEOMETRIA FILE N. 7: FORMA NORMALE DI JORDAN. PRODOTTI SCALARI. SPAZI VETTORIALI EUCL 4. soluzioni.. n. 7. Eccone alcuni: (e) Il polinomio caratteristico è x 4. Dunque i quattro autovalori sono distinti: ±, ±i. La matrice è diagonalizzabile e la forma di Jordan è diag(,, i, ). Un riferimento che la realizzi è semplicemente un riferimento fatto da autovettori. (f) Qua gli autovalori sono ±, entrambi doppi. Si verifica che gli autospazi hanno entrambi dimensione due, dunque la matrice è diagonalizzabile. Dunque la forma di Jordan è semplicemente diag(,,, ). Vedi sopra. (d) Anche qua gli autovalori sono distinti:,, 2. Dunque è diagonalizzabile (vedi sopra). (c) Finalmente una non diagonalizzabile. Gli autovalori sono 2 (doppio) e (semplice). Si verifica che E =< w > con w =(0, 5, 2). Per quanto riguarda l autovalore 2 si verifica che A 2I 3 ha rango 2, dunque la dimensione dell autospazio è, dunque la matrice A non è diagonalizzabile. Sappiamo dal teorema di riduzione al caso nilpotente che (A 2I 3 ) 2 = 0 (l esponente 2 è la molteplicità algebrica dell autovalore). Dunque la forma di Jordan è 0 J 2 (2) J () A. 0 0 Per trovare una base che la realizzi 0 dobbiamo trovare un elemento di ordine 2 per A 2I 3 in ker(a 2I 3 ) 2.Sihache(A 2I 3 ) A. Dunqueker(A 2I 3 ) 2 =< (, 0, 0), (0, 3, ) >. Il vettore (0, 3, ) = u non sta in ker(a 2I 3 ) e quindi ha necessariamente ordine 2 per A 2I 3. Abbiamo che (A 2I 3 )u =(, 0, 0). Dunque R =((, 0, 0), (0, 3, ), 0, 5, 2)) è un riferimento che realizza la forma di Jordan n. 8. (a) La trasposta della matrice J n ( )è B = I n J n (0) T. Dunque A 0... l unico autovalore è con molteplicità algebrica n e la matrice la matrice J n (0) T è nilpotente con indice di nilpotenza n. Quindi la forma di Jordan di questa matrice sarà J n ( ). (b) Sappiamo che la forma di Jordan è unica (a meno di permutazione dei blocchi). Dunque, poichè ogni matrice a coe cienti complessi è coniugata ad una forma di Jordan, due matrici a coe cienti complessi sono coniugate se e solo se hanno la stessa forma di Jordan. (c) Se A = C JC,doveJ è una forma di Jordan, allora A T =(C AC) T = C T J T (C ) T = C T J T (C T )
6 4ESERCIZI GEOMETRIA FILE N. 7 : FORMA NORMALE DI JORDAN. PRODOTTI SCALARI. SPAZI VETTORIALI EUCL (infatti (C ) T =(C T ) perchè I n = I T n =(CC ) T = C T (C ) T ). Quindi A T è coniugata alla matrice J T, che è somma diretta di blocchi di Jordan. Dunque, per il punto (a), J T è coniugata a J. n. 9. Nel primo caso c e un unica forma di Jordan possibile: J n (0). Anche nel secondo caso c e un unica forma di Jordan possibile: J n (0) J (0). n. 20. L esistenza della forma di Jordan implica in particolare che ogni matrice A 2 M n,n, (C) è coniugata ad una matrice della forma diag + N, con A diagonale (sulla diagonale ci sono gli autovalori ripetuti tante volte quanto le loro molteplicità algebriche) e N somma diretta di blocchi di Jordan J k (0), quindi nilpotente. Dunque A = C diag C + C NC. La prima matrice è diagonalizzabile per definizione. La seconda matrice è nilpotente, quasi per definizione, perchè rappresenta in qualche riferimento un endomorfismo nilpotente..2. (a) Una matrice è nilpotente se e solo se il suo polinomio caratteristico è ( ) n x n. Nel caso n = 2 questo si riduce al fatto che det A =0eTrA = 0. Dunque sono tutte e sole le matrici ( a a A = 2 a a 22 a 2 a 2 =0 tali che.sea a 2 a 2 6= 0 queste sono le matrici della forma 22 a + a 22 =0 a! a 2 a 2 a 2 a Se a 3 = 0 allora troviamo, allo stesso modo, le matrici della forma! a 22 a 2 22 a 2 a 2 a 22 Se invece a 2 = a 2 = 0 allora A = O. (Ovviamente ci sono matrici che sono sia del primo che del secondo tipo) (c) Sono nove:,,,,,,,, Sono tutte forme bilineari simmetriche. Usando il metodo di complemento del quadrato si trova: (a) No, non è positiva. (b) Si, è positiva. (c) No, non è positiva Sono tutte forme bilineari simmetriche. Usando il metodo di complemento del quadrato si trova: (a) No, non è positiva. (b) Si, è positiva (a) NO (positività). (b) NO (linearità). (c) NO (linearità). (d). SI. Infatti (X, Y ) = 2( P n i= x iy i ) = 2(X Y )
7 ESERCIZI GEOMETRIA FILE N. 7: FORMA NORMALE DI JORDAN. PRODOTTI SCALARI. SPAZI VETTORIALI EUCL 2.4. (a) No (positività): Sia P (x) =x(x ), si ha che (P, P) = 0. (b) Si. (c) Si. (d) No (positività). Simile ad (a). (e) No (positività): Sia P (x) =x. Sihache(P, P) =( R x)2 = 0. (f) No (positività): se P è una costante (cioè un polinomio di grado 0) allora (P, P) = Si verifica facilmente (fatelo) che (P, Q) è sempre una forma bilineare simmetrica semipositiva (indipendentemente dal numero dei numeri reali x i ). La forma è definita positiva se e solo se il numero m dei numeri reali x i è n +. Infatti in questo caso se P m i= P (x i) 2 = 0 allora P (x i )=0 per ogni i =,...,n+equestoimplicachep = 0 perchè un polinomio di grado n non nullo ha al più n zeri. 3.. Faccio solo il caso (b) dell esercizio 2.4. Il caso (c) fatelo voi. (i) {,x,x }. (ii) Sia P (x) =a + bx + cx 2 2 R[x] apple2. Applicando la definizione del prodotto scalare in questione risulta che: (x +,P(x)) = 0 P ( ) + P (0) + 2P () = a + 2(a + b + c) =3a + b + c. Dunque <x+>? = {a + bx + cx 2 3a + b + c =0} =< 3x 2,x x 2 >. (iii) (x 2,x+ ) (x + ) = 2 (x + ) (x +,x+ ) (a) Usando che la base è ortogonale si trova che v 2 = v v = P 3 i= u i u i = = 9. In conclusione v = 3. Therefore In modo simile si trova che: cos 2 = cos = v u v u = 2 3 p p 2 3, cos 3 = 3 3. (b) u ^ v è l area del parallelogramma costruito su u and v. Quindi è uguale a u v sin = 6 p 5/9 =2 p 5. Inoltre, poichè u e u 2 sono ortogonali, u ^ u 2 = u u 2 =2 p 2. (c) v (u ^ u 2 ) è il volume del parallelepipedo costruito su v, u,eu 2. È uguale a v u ^ u 2 ) cos 3 =2 p 2 p Ortogonalizzando u e v risultano u =(, 2, 2) e v 0 = 9 (, 3, 32). Normalizzando si ha u 0 = 9 (, 2, 2) e z = 9 p (, 3, 32). Dunque i versori 988 p 3 2 u0 ± 2 z stanno nel sottospazio vettoriale < u, v > e formano con u (o, equivalentemente, con u 0 ) un angolo il cui coseno è uguale a 2 = cos 3. Infatti, per costruzione, w u 0 w u 0 = 2 +0 = 2.
Prova scritta di Geometria 1 Docente: Giovanni Cerulli Irelli 20 Gennaio 2017
 Prova scritta di Geometria Docente: Giovanni Cerulli Irelli Gennaio 7 Esercizio. Si considerino i seguenti tre punti dello spazio euclideo: P :=, Q :=, R :=.. Dimostrare che P, Q ed R non sono collineari.
Prova scritta di Geometria Docente: Giovanni Cerulli Irelli Gennaio 7 Esercizio. Si considerino i seguenti tre punti dello spazio euclideo: P :=, Q :=, R :=.. Dimostrare che P, Q ed R non sono collineari.
SPAZI EUCLIDEI, APPLICAZIONI SIMMETRICHE, FORME QUADRATICHE
 SPAZI EUCLIDEI, APPLICAZIONI SIMMETRICHE, FORME QUADRATICHE. Esercizi Esercizio. In R calcolare il modulo dei vettori,, ),,, ) ed il loro angolo. Esercizio. Calcolare una base ortonormale del sottospazio
SPAZI EUCLIDEI, APPLICAZIONI SIMMETRICHE, FORME QUADRATICHE. Esercizi Esercizio. In R calcolare il modulo dei vettori,, ),,, ) ed il loro angolo. Esercizio. Calcolare una base ortonormale del sottospazio
Algebra Lineare - Autunno 2008
 Algebra Lineare - Autunno 2008 Kieran O Grady 1 29 Settembre: Vettori geometrici Segmenti orientati ed equipollenza. Vettori geometrici. Somma e prodotto per uno scalare: definizione e proprietà algebriche.
Algebra Lineare - Autunno 2008 Kieran O Grady 1 29 Settembre: Vettori geometrici Segmenti orientati ed equipollenza. Vettori geometrici. Somma e prodotto per uno scalare: definizione e proprietà algebriche.
Algebra e Geometria 2 per Informatica Primo Appello 23 giugno 2006 Tema A W = { A M 2 (R) A T = A }
 A T = A }") Algebra e Geometria per Informatica Primo Appello 3 giugno 6 Tema A Sia M (R lo spazio vettoriale delle matrici a coefficienti reali Sia W = { A M (R A T = A } il sottospazio vettoriale delle matrici simmetriche
Algebra e Geometria per Informatica Primo Appello 3 giugno 6 Tema A Sia M (R lo spazio vettoriale delle matrici a coefficienti reali Sia W = { A M (R A T = A } il sottospazio vettoriale delle matrici simmetriche
Complemento ortogonale e proiezioni
 Complemento ortogonale e proiezioni Dicembre 9 Complemento ortogonale di un sottospazio Sie E un sottospazio di R n Definiamo il complemento ortogonale di E come l insieme dei vettori di R n ortogonali
Complemento ortogonale e proiezioni Dicembre 9 Complemento ortogonale di un sottospazio Sie E un sottospazio di R n Definiamo il complemento ortogonale di E come l insieme dei vettori di R n ortogonali
(2) Dato il vettore w = (1, 1, 1), calcolare T (w). (3) Determinare la matrice A associata a T rispetto alla base canonica.
 Dato il vettore w = (1, 1, 1), calcolare T (w). (3) Determinare la matrice A associata a T rispetto alla base canonica.") 1. Applicazioni lineari Esercizio 1.1. Sia T : R 2 R 3 l applicazione lineare definita sulla base canonica di R 2 nel seguente modo: T (e 1 ) = (1, 2, 1), T (e 2 ) = (1, 0, 1). a) Esplicitare T (x, y).
1. Applicazioni lineari Esercizio 1.1. Sia T : R 2 R 3 l applicazione lineare definita sulla base canonica di R 2 nel seguente modo: T (e 1 ) = (1, 2, 1), T (e 2 ) = (1, 0, 1). a) Esplicitare T (x, y).
{Geometria per [Fisica e (Fisica e Astrofisica)]}
![{Geometria per [Fisica e (Fisica e Astrofisica)]}](/thumbs/103/157763717.jpg "{Geometria per [Fisica e (Fisica e Astrofisica)]}") {Geometria per [Fisica e (Fisica e Astrofisica)]} Foglio 9 - Soluzioni Esercizio (facoltativo) Un quadrato magico reale di ordine n è una matrice di M n n (R) tale che sommando gli elementi di ogni sua
{Geometria per [Fisica e (Fisica e Astrofisica)]} Foglio 9 - Soluzioni Esercizio (facoltativo) Un quadrato magico reale di ordine n è una matrice di M n n (R) tale che sommando gli elementi di ogni sua
1. Esercizi Geometria File n. 6: Diagonalizzazione, triangolarizzazione, teorema di Cayley-Hamilton, forma normale di Jordan.
 1 Esercizi Geometria 2 2017-18 File n 6: Diagonalizzazione, triangolarizzazione, teorema di Cayley-Hamilton, forma normale di Jordan ( ) cos θ sin θ Es 11 Sia θ [0, 2π) e sia A θ = (attenzione: non è la
1 Esercizi Geometria 2 2017-18 File n 6: Diagonalizzazione, triangolarizzazione, teorema di Cayley-Hamilton, forma normale di Jordan ( ) cos θ sin θ Es 11 Sia θ [0, 2π) e sia A θ = (attenzione: non è la
ESERCIZI DI GEOMETRIA E ALGEBRA LINEARE (II PARTE) In ogni sezione gli esercizi sono tendenzialmente ordinati per difficoltà crescente.
 In ogni sezione gli esercizi sono tendenzialmente ordinati per difficoltà crescente.") ESERCIZI DI GEOMETRIA E ALGEBRA LINEARE (II PARTE) versione: 24 maggio 27 In ogni sezione gli esercizi sono tendenzialmente ordinati per difficoltà crescente Autovettori e autovalori Esercizio Trova gli
ESERCIZI DI GEOMETRIA E ALGEBRA LINEARE (II PARTE) versione: 24 maggio 27 In ogni sezione gli esercizi sono tendenzialmente ordinati per difficoltà crescente Autovettori e autovalori Esercizio Trova gli
3. Determinare dimensione a basi per l annullatore ker(f) e per il complemento. Esercizio 2. Sia V uno spazio vettoriale reale di dimensione finita d.
 e per il complemento. Esercizio 2. Sia V uno spazio vettoriale reale di dimensione finita d.") Esercizi --- 5-- Esercizio. Sia f =: L A : R 4 R 4, ove A = 3 e sia B =:.. Dimostrare che B è una base di R 4.. Determinare la matrice di L A nella base B. 3. Determinare dimensione a basi per l annullatore
Esercizi --- 5-- Esercizio. Sia f =: L A : R 4 R 4, ove A = 3 e sia B =:.. Dimostrare che B è una base di R 4.. Determinare la matrice di L A nella base B. 3. Determinare dimensione a basi per l annullatore
Geometria BAER Canale A-K Esercizi 8
 Geometria BAER Canale A-K Esercizi 8 Esercizio. Si consideri il sottospazio U = L v =, v, v 3 =. (a) Si trovino le equazioni cartesiane ed una base ortonormale di U. (b) Si trovi una base ortonormale di
Geometria BAER Canale A-K Esercizi 8 Esercizio. Si consideri il sottospazio U = L v =, v, v 3 =. (a) Si trovino le equazioni cartesiane ed una base ortonormale di U. (b) Si trovi una base ortonormale di
Matrici simili. Matrici diagonalizzabili.
 Matrici simili. Matrici diagonalizzabili. Definizione (Matrici simili) Due matrici quadrate A, B si dicono simili se esiste una matrice invertibile P tale che B = P A P. () interpretazione: cambio di base.
Matrici simili. Matrici diagonalizzabili. Definizione (Matrici simili) Due matrici quadrate A, B si dicono simili se esiste una matrice invertibile P tale che B = P A P. () interpretazione: cambio di base.
Geometria 1 a.a. 2011/12 Esonero del 15/11/11
 Geometria a.a. 0/ Esonero del 5// () Determinare una base ortonormale del piano π di R 3 di equazione x + y z 0 (rispetto al prodotto scalare standard di R 3 ). Soluzioni. È sufficiente determinare una
Geometria a.a. 0/ Esonero del 5// () Determinare una base ortonormale del piano π di R 3 di equazione x + y z 0 (rispetto al prodotto scalare standard di R 3 ). Soluzioni. È sufficiente determinare una
Soluzioni della prova scritta di Geometria 1 del 27 giugno 2019 (versione I)
") Soluzioni della prova scritta di Geometria 1 del 7 giugno 019 (versione I) Esercizio 1. Sia R 4 lo spazio quadridimensionale standard munito del prodotto scalare standard con coordinate canoniche (x 1,
Soluzioni della prova scritta di Geometria 1 del 7 giugno 019 (versione I) Esercizio 1. Sia R 4 lo spazio quadridimensionale standard munito del prodotto scalare standard con coordinate canoniche (x 1,
PROGRAMMA DEL CORSO DI GEOMETRIA E ALGEBRA. A.A
 PROGRAMMA DEL CORSO DI GEOMETRIA E ALGEBRA. A.A. 2011-12 DOCENTE TITOLARE: FRANCESCO BONSANTE 1. Geometria analitica dello spazio (1) vettori applicati e lo spazio E 3 O: operazioni su vettori e proprietà.
PROGRAMMA DEL CORSO DI GEOMETRIA E ALGEBRA. A.A. 2011-12 DOCENTE TITOLARE: FRANCESCO BONSANTE 1. Geometria analitica dello spazio (1) vettori applicati e lo spazio E 3 O: operazioni su vettori e proprietà.
Soluzione. (a) L insieme F 1 e linearmente indipendente; gli insiemi F 2 ed F 3 sono linearmente
 L insieme F 1 e linearmente indipendente; gli insiemi F 2 ed F 3 sono linearmente") 1. Insiemi di generatori, lineare indipendenza, basi, dimensione. Consideriamo nello spazio vettoriale R 3 i seguenti vettori: v 1 = (0, 1, ), v = (1, 1, 1), v 3 = (, 1, 0), v 4 = (3, 3, ). Siano poi F
1. Insiemi di generatori, lineare indipendenza, basi, dimensione. Consideriamo nello spazio vettoriale R 3 i seguenti vettori: v 1 = (0, 1, ), v = (1, 1, 1), v 3 = (, 1, 0), v 4 = (3, 3, ). Siano poi F
Facoltà di Anno Accademico 2018/19 Registro lezioni del docente PINTUS NICOLA
 Facoltà di Anno Accademico 2018/19 Registro lezioni del docente PINTUS NICOLA Attività didattica GEOMETRIA E ALGEBRA [IN/0079] Partizionamento: Periodo di svolgimento: Docente titolare del corso: PINTUS
Facoltà di Anno Accademico 2018/19 Registro lezioni del docente PINTUS NICOLA Attività didattica GEOMETRIA E ALGEBRA [IN/0079] Partizionamento: Periodo di svolgimento: Docente titolare del corso: PINTUS
Prova scritta di Geometria 1 Docente: Giovanni Cerulli Irelli 15 Febbraio 2017
 Prova scritta di Geometria Docente: Giovanni Cerulli Irelli 5 Febbraio 7 Esercizio. Si considerino i due sottospazi π e π di R dati dalle seguenti equazioni: π : x y + z = ; π : x + y z =.. Trovare una
Prova scritta di Geometria Docente: Giovanni Cerulli Irelli 5 Febbraio 7 Esercizio. Si considerino i due sottospazi π e π di R dati dalle seguenti equazioni: π : x y + z = ; π : x + y z =.. Trovare una
0. Introduzione al linguaggio matematico
 Prof. Lidia Angeleri Università di Verona, 2014/15 Algebra Lineare ed Elementi di Geometria (Programma aggiornato in data 26 novembre 2014) 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Prof. Lidia Angeleri Università di Verona, 2014/15 Algebra Lineare ed Elementi di Geometria (Programma aggiornato in data 26 novembre 2014) 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Corso di Laurea in Matematica - Esame di Geometria 1. Prova scritta del 7 settembre 2015
 Corso di Laurea in Matematica - Esame di Geometria 1 Prova scritta del 7 settembre 215 Cognome Nome Numero di matricola Voto ATTENZIONE. Riportare lo svolgimento completo degli esercizi. corretti, non
Corso di Laurea in Matematica - Esame di Geometria 1 Prova scritta del 7 settembre 215 Cognome Nome Numero di matricola Voto ATTENZIONE. Riportare lo svolgimento completo degli esercizi. corretti, non
GEOMETRIA 1 Autovalori e autovettori
 GEOMETRIA 1 Autovalori e autovettori Gilberto Bini - Anna Gori - Cristina Turrini 2018/2019 Gilberto Bini - Anna Gori - Cristina Turrini (2018/2019) GEOMETRIA 1 1 / 28 index Matrici rappresentative "semplici"
GEOMETRIA 1 Autovalori e autovettori Gilberto Bini - Anna Gori - Cristina Turrini 2018/2019 Gilberto Bini - Anna Gori - Cristina Turrini (2018/2019) GEOMETRIA 1 1 / 28 index Matrici rappresentative "semplici"
Geometria A. Università degli Studi di Trento Corso di laurea in Matematica A.A. 2017/ Maggio 2018 Prova Intermedia
 Geometria A Università degli Studi di Trento Corso di laurea in Matematica A.A. 7/8 Maggio 8 Prova Intermedia Il tempo per la prova è di ore. Durante la prova non è permesso l uso di appunti e libri. Esercizio
Geometria A Università degli Studi di Trento Corso di laurea in Matematica A.A. 7/8 Maggio 8 Prova Intermedia Il tempo per la prova è di ore. Durante la prova non è permesso l uso di appunti e libri. Esercizio
Parte 8. Prodotto scalare, teorema spettrale
 Parte 8. Prodotto scalare, teorema spettrale A. Savo Appunti del Corso di Geometria 3-4 Indice delle sezioni Prodotto scalare in R n, Basi ortonormali, 4 3 Algoritmo di Gram-Schmidt, 7 4 Matrici ortogonali,
Parte 8. Prodotto scalare, teorema spettrale A. Savo Appunti del Corso di Geometria 3-4 Indice delle sezioni Prodotto scalare in R n, Basi ortonormali, 4 3 Algoritmo di Gram-Schmidt, 7 4 Matrici ortogonali,
ATTENZIONE: : giustificate le vostre argomentazioni! Geometria Canale 3. Lettere J-PE (Prof P. Piazza) Esame scritto del 12/02/2014. Compito A.
 Esame scritto del 12/02/2014. Compito A.") Geometria Canale. Lettere J-PE (Prof P. Piazza) Esame scritto del 12/02/2014. Compito A. Nome e Cognome: Numero di Matricola: Esercizio Punti totali Punteggio 1 7 2 6 6 4 6+1 5 6+2 Totale 1+ ATTENZIONE:
Geometria Canale. Lettere J-PE (Prof P. Piazza) Esame scritto del 12/02/2014. Compito A. Nome e Cognome: Numero di Matricola: Esercizio Punti totali Punteggio 1 7 2 6 6 4 6+1 5 6+2 Totale 1+ ATTENZIONE:
Sapienza Università di Roma Corso di laurea in Ingegneria Energetica Geometria A.A ESERCIZI DA CONSEGNARE prof.
 Sapienza Università di Roma Corso di laurea in Ingegneria Energetica Geometria A.A. 2015-2016 ESERCIZI DA CONSEGNARE prof. Cigliola Consegna per Martedì 6 Ottobre Esercizio 1. Una matrice quadrata A si
Sapienza Università di Roma Corso di laurea in Ingegneria Energetica Geometria A.A. 2015-2016 ESERCIZI DA CONSEGNARE prof. Cigliola Consegna per Martedì 6 Ottobre Esercizio 1. Una matrice quadrata A si
PROGRAMMA DEL CORSO DI GEOMETRIA E ALGEBRA. A.A
 PROGRAMMA DEL CORSO DI GEOMETRIA E ALGEBRA. A.A. 2010-11 DOCENTE TITOLARE: FRANCESCO BONSANTE 1. Geometria analitica dello spazio (1) vettori applicati e lo spazio E 3 O: operazioni su vettori e proprietà.
PROGRAMMA DEL CORSO DI GEOMETRIA E ALGEBRA. A.A. 2010-11 DOCENTE TITOLARE: FRANCESCO BONSANTE 1. Geometria analitica dello spazio (1) vettori applicati e lo spazio E 3 O: operazioni su vettori e proprietà.
APPUNTI SULLA DIAGONALIZZAZIONE Corso Prof. F.Podestà, a.a
 APPUNTI SULLA DIAGONALIZZAZIONE Corso Prof FPodestà, aa 003-004 Sia V uno spazio vettoriale e sia f : V V una applicazione lineare una tale applicazione da uno spazio vettoriale in se stesso è chiamata
APPUNTI SULLA DIAGONALIZZAZIONE Corso Prof FPodestà, aa 003-004 Sia V uno spazio vettoriale e sia f : V V una applicazione lineare una tale applicazione da uno spazio vettoriale in se stesso è chiamata
0. Introduzione al linguaggio matematico
 Prof. Lidia Angeleri Università di Verona, 2009/2010 Algebra Lineare ed Elementi di Geometria Programma svolto nel Modulo Algebra Lineare 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Prof. Lidia Angeleri Università di Verona, 2009/2010 Algebra Lineare ed Elementi di Geometria Programma svolto nel Modulo Algebra Lineare 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Algebra lineare e geometria AA Appunti sul cambio di base in uno spazio vettoriale
 Algebra lineare e geometria AA. 8-9 Appunti sul cambio di base in uno spazio vettoriale Matrice di un applicazione lineare Siano V e W due spazi vettoriali su un campo K {R, C}, entrambi finitamente generati,
Algebra lineare e geometria AA. 8-9 Appunti sul cambio di base in uno spazio vettoriale Matrice di un applicazione lineare Siano V e W due spazi vettoriali su un campo K {R, C}, entrambi finitamente generati,
INGEGNERIA EDILE ARCHITETTURA ELEMENTI DI ALGEBRA LINEARE E GEOMETRIA 17 SETTEMBRE 2012
 INGEGNERIA EDILE ARCHITETTURA ELEMENTI DI ALGEBRA LINEARE E GEOMETRIA 7 SETTEMBRE 202 Esercizio. Sia V = R[X] 2 lo spazio vettoriale dei polinomi ax 2 + bx + c nella variabile X di grado al più 2 a coefficienti
INGEGNERIA EDILE ARCHITETTURA ELEMENTI DI ALGEBRA LINEARE E GEOMETRIA 7 SETTEMBRE 202 Esercizio. Sia V = R[X] 2 lo spazio vettoriale dei polinomi ax 2 + bx + c nella variabile X di grado al più 2 a coefficienti
Algebra lineare e geometria AA Appunti sul cambio di base in uno spazio vettoriale
 Algebra lineare e geometria AA. -7 Appunti sul cambio di base in uno spazio vettoriale Matrice di un applicazione lineare Siano V e W due spazi vettoriali su un campo K {R, C}, entrambi finitamente generati,
Algebra lineare e geometria AA. -7 Appunti sul cambio di base in uno spazio vettoriale Matrice di un applicazione lineare Siano V e W due spazi vettoriali su un campo K {R, C}, entrambi finitamente generati,
Esame di Geometria e Algebra Lineare
 Esame di Geometria e Algebra Lineare Esame scritto: 28 Luglio 2014 Esame orale: Cognome: Nome: Matricola: Tutte le risposte devono essere motivate. Gli esercizi vanno svolti su questi fogli, nello spazio
Esame di Geometria e Algebra Lineare Esame scritto: 28 Luglio 2014 Esame orale: Cognome: Nome: Matricola: Tutte le risposte devono essere motivate. Gli esercizi vanno svolti su questi fogli, nello spazio
Algebra lineare e geometria AA Esercitazione del 14/6/2018
 Algebra lineare e geometria AA. 2017-2018 Esercitazione del 14/6/2018 1) Siano A, B due matrici n n tali che 0 < rk(a) < rk(b) = n. (a) AB è invertibile. (b) rk(ab) = nrk(b). (c) det(ab) = det(a). (d)
Algebra lineare e geometria AA. 2017-2018 Esercitazione del 14/6/2018 1) Siano A, B due matrici n n tali che 0 < rk(a) < rk(b) = n. (a) AB è invertibile. (b) rk(ab) = nrk(b). (c) det(ab) = det(a). (d)
ii 1.20 Rango di una matrice Studio dei sistemi lineari Teoremi di Cramer e Rouché-Capelli......
 Indice Prefazione vii 1 Matrici e sistemi lineari 1 1.1 Le matrici di numeri reali................. 1 1.2 Nomenclatura in uso per le matrici............ 3 1.3 Matrici ridotte per righe e matrici ridotte
Indice Prefazione vii 1 Matrici e sistemi lineari 1 1.1 Le matrici di numeri reali................. 1 1.2 Nomenclatura in uso per le matrici............ 3 1.3 Matrici ridotte per righe e matrici ridotte
Spazi euclidei, endomorfismi simmetrici, forme quadratiche. R. Notari
 Spazi euclidei, endomorfismi simmetrici, forme quadratiche R. Notari 14 Aprile 2006 1 1. Proprietà del prodotto scalare. Sia V = R n lo spazio vettoriale delle n-uple su R. Il prodotto scalare euclideo
Spazi euclidei, endomorfismi simmetrici, forme quadratiche R. Notari 14 Aprile 2006 1 1. Proprietà del prodotto scalare. Sia V = R n lo spazio vettoriale delle n-uple su R. Il prodotto scalare euclideo
Matrici jordanizzabili
 Capitolo 17 Matrici jordanizzabili 17.1 Introduzione Abbiamo visto che non tutte le matrici sono simili a matrici diagonali. Mostreremo in questo capitolo che alcune matrici sono simili a matrici di Jordan.
Capitolo 17 Matrici jordanizzabili 17.1 Introduzione Abbiamo visto che non tutte le matrici sono simili a matrici diagonali. Mostreremo in questo capitolo che alcune matrici sono simili a matrici di Jordan.
B = (e 1,..., e n ) di V, e una sequenza C = ( f 1,..., f n ) di vettori di. Lezione del 21 maggio.
 di V, e una sequenza C = ( f 1,..., f n ) di vettori di. Lezione del 21 maggio.") Lezione del maggio. Il riferimento principale di questa lezione e costituito da parti di: 3 Trasformazioni ortogonali, 4 Complemento ortogonale, 5 Matrici di Gram e proiezioni ortogonali, 6 Orientazione
Lezione del maggio. Il riferimento principale di questa lezione e costituito da parti di: 3 Trasformazioni ortogonali, 4 Complemento ortogonale, 5 Matrici di Gram e proiezioni ortogonali, 6 Orientazione
Facoltà di INGEGNERIA E ARCHITETTURA Anno Accademico 2016/17 Registro lezioni del docente ZUDDAS FABIO
 Facoltà di INGEGNERIA E ARCHITETTURA Anno Accademico 2016/17 Registro lezioni del docente ZUDDAS FABIO Attività didattica GEOMETRIA E ALGEBRA [IN/0079] Periodo di svolgimento: Secondo Semestre Docente
Facoltà di INGEGNERIA E ARCHITETTURA Anno Accademico 2016/17 Registro lezioni del docente ZUDDAS FABIO Attività didattica GEOMETRIA E ALGEBRA [IN/0079] Periodo di svolgimento: Secondo Semestre Docente
Esercizi di Complementi di Matematica (L-Z) a.a. 2015/2016
 a.a. 2015/2016") Esercizi di Complementi di Matematica (L-Z) a.a. 2015/2016 Prodotti scalari e forme bilineari simmetriche (1) Sia F : R 2 R 2 R un applicazione definita da F (x, y) = x 1 y 1 + 3x 1 y 2 5x 2 y 1 + 2x 2
Esercizi di Complementi di Matematica (L-Z) a.a. 2015/2016 Prodotti scalari e forme bilineari simmetriche (1) Sia F : R 2 R 2 R un applicazione definita da F (x, y) = x 1 y 1 + 3x 1 y 2 5x 2 y 1 + 2x 2
Prova scritta di Fondamenti di Algebra Lineare e Geometria Vicenza, 22 giugno 2015 TEMA 1
 TEMA 1 1. Dato il polinomio P (X) = X 4 + 8X 3 + 21X 2 + 32X + 68: (i) stabilire se (X 2i) divide il polinomio P (X); 2. Sia L a l endomorfismo di R 3 tale che L a (0, 1, 1) = (1, a 1, 2), L a (1, 1, 0)
TEMA 1 1. Dato il polinomio P (X) = X 4 + 8X 3 + 21X 2 + 32X + 68: (i) stabilire se (X 2i) divide il polinomio P (X); 2. Sia L a l endomorfismo di R 3 tale che L a (0, 1, 1) = (1, a 1, 2), L a (1, 1, 0)
Diagonalizzabilità di endomorfismi
 Capitolo 16 Diagonalizzabilità di endomorfismi 16.1 Introduzione Nei capitoli precedenti abbiamo definito gli endomorfismi su uno spazio vettoriale E. Abbiamo visto che, dato un endomorfismo η di E, se
Capitolo 16 Diagonalizzabilità di endomorfismi 16.1 Introduzione Nei capitoli precedenti abbiamo definito gli endomorfismi su uno spazio vettoriale E. Abbiamo visto che, dato un endomorfismo η di E, se
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura I Appello corso di Geometria a.a. 0/3 Docente F. Flamini NORME SVOLGIMENTO Negli appositi spazi scrivere
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura I Appello corso di Geometria a.a. 0/3 Docente F. Flamini NORME SVOLGIMENTO Negli appositi spazi scrivere
=. Il vettore non è della forma λ, dunque non è un. 2. Il vettore 8 2 non è della forma λ 1
 a.a. 2005-2006 Esercizi. Autovalori e autovettori. Soluzioni. Sia A = e sia x =. Dire se x è autovettore di A. Se si dire per quale 8 autovalore. Sol. Si ha =. Il vettore non è della forma λ dunque 8 29
a.a. 2005-2006 Esercizi. Autovalori e autovettori. Soluzioni. Sia A = e sia x =. Dire se x è autovettore di A. Se si dire per quale 8 autovalore. Sol. Si ha =. Il vettore non è della forma λ dunque 8 29
Autovalori e autovettori
 Autovalori e autovettori Definizione 1 (per endomorfismi). Sia V uno spazio vettoriale su di un campo K e f : V V un suo endomorfismo. Si dice autovettore per f ogni vettore x 0 tale che f(x) = λx, per
Autovalori e autovettori Definizione 1 (per endomorfismi). Sia V uno spazio vettoriale su di un campo K e f : V V un suo endomorfismo. Si dice autovettore per f ogni vettore x 0 tale che f(x) = λx, per
Geometria I. Soluzioni della prova scritta del 19 settembre 2016
 Geometria I Soluzioni della prova scritta del 9 settembre 6 Esercizio Consideriamo una forma bilineare simmetrica g : V V R su uno spazio vettoriale reale V di dimensione finita, una sua base B e la matrice
Geometria I Soluzioni della prova scritta del 9 settembre 6 Esercizio Consideriamo una forma bilineare simmetrica g : V V R su uno spazio vettoriale reale V di dimensione finita, una sua base B e la matrice
Prima prova scritta di Geometria 1, 26 gennaio 2018
 Prima prova scritta di Geometria 1, 26 gennaio 2018 1. Dimostrare che M A B : Hom(V,W) M(m n,k) è un isomorfismo (lineare, iniettivo e suriettivo), dove M A B associa a un applicazione lineare f : V W
Prima prova scritta di Geometria 1, 26 gennaio 2018 1. Dimostrare che M A B : Hom(V,W) M(m n,k) è un isomorfismo (lineare, iniettivo e suriettivo), dove M A B associa a un applicazione lineare f : V W
(V) (FX) L unione di due basi di uno spazio vettoriale è ancora una base dello spazio vettoriale.
 (FX) L unione di due basi di uno spazio vettoriale è ancora una base dello spazio vettoriale.") 8 gennaio 2009 - PROVA D ESAME - Geometria e Algebra T NOME: MATRICOLA: a=, b=, c= Sostituire ai parametri a, b, c rispettivamente la terzultima, penultima e ultima cifra del proprio numero di matricola
8 gennaio 2009 - PROVA D ESAME - Geometria e Algebra T NOME: MATRICOLA: a=, b=, c= Sostituire ai parametri a, b, c rispettivamente la terzultima, penultima e ultima cifra del proprio numero di matricola
0. Introduzione al linguaggio matematico
 Prof. Lidia Angeleri Università di Verona, 2012/13 Algebra Lineare ed Elementi di Geometria Programma svolto nel Modulo Algebra Lineare 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi 1.2
Prof. Lidia Angeleri Università di Verona, 2012/13 Algebra Lineare ed Elementi di Geometria Programma svolto nel Modulo Algebra Lineare 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi 1.2
2. Nello spazio vettoriale V delle matrici a coefficienti reali di ordine 2 si consideri il sottospazio vettoriale U delle matrici simmetriche (A = A
 Esame di Geometria del 19 luglio 2013 Nome: Cognome: Corso di Laurea: 5cf u Giustificare le risposte con spiegazioni chiare ed essenziali. Consegnare esclusivamente questi due fogli. 1. In R 3 si considerino
Esame di Geometria del 19 luglio 2013 Nome: Cognome: Corso di Laurea: 5cf u Giustificare le risposte con spiegazioni chiare ed essenziali. Consegnare esclusivamente questi due fogli. 1. In R 3 si considerino
Geometria BAER Canale A-K Esercizi 9
 Geometria BAER Canale A-K Esercizi 9 Esercizio Sia (V,, ) uno spazio metrico Si mostri che se U V, v V, p U la proiezione ortogonale su U, allora v p U (v) U Soluzione: Il vettore v si scrive in modo unico
Geometria BAER Canale A-K Esercizi 9 Esercizio Sia (V,, ) uno spazio metrico Si mostri che se U V, v V, p U la proiezione ortogonale su U, allora v p U (v) U Soluzione: Il vettore v si scrive in modo unico
Geometria BAER Canale A-K Esercizi 8
 Geometria BAER 6-7 Canale A-K Esercizi 8 Esercizio Si consideri il sottospazio (a) Si trovi una base ortonormale di U (b) Si trovi una base ortonormale di U U = L v =, v, v 3 = (c) Si scriva la matrice
Geometria BAER 6-7 Canale A-K Esercizi 8 Esercizio Si consideri il sottospazio (a) Si trovi una base ortonormale di U (b) Si trovi una base ortonormale di U U = L v =, v, v 3 = (c) Si scriva la matrice
Autovalori e autovettori di una matrice quadrata
 Autovalori e autovettori di una matrice quadrata Data la matrice A M n (K, vogliamo stabilire se esistono valori di λ K tali che il sistema AX = λx ammetta soluzioni non nulle. Questo risulta evidentemente
Autovalori e autovettori di una matrice quadrata Data la matrice A M n (K, vogliamo stabilire se esistono valori di λ K tali che il sistema AX = λx ammetta soluzioni non nulle. Questo risulta evidentemente
Autovettori e autovalori
 Autovettori e autovalori Definizione 1 Sia A Mat(n, n), matrice a coefficienti reali. Si dice autovalore di A un numero λ R tale che v 0 R n Av = λv. Ogni vettore non nullo v che soddisfa questa relazione
Autovettori e autovalori Definizione 1 Sia A Mat(n, n), matrice a coefficienti reali. Si dice autovalore di A un numero λ R tale che v 0 R n Av = λv. Ogni vettore non nullo v che soddisfa questa relazione
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA CHIMICA E DEI MATERIALI 27 GIUGNO 2016
 FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA CHIMICA E DEI MATERIALI 7 GIUGNO 06 MATTEO LONGO Ogni versione del compito contiene solo due tra i quattro esercizi 6-7-8-9. Esercizio. Considerare
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA CHIMICA E DEI MATERIALI 7 GIUGNO 06 MATTEO LONGO Ogni versione del compito contiene solo due tra i quattro esercizi 6-7-8-9. Esercizio. Considerare
Geometria Appello I Sessione Invernale Corso di laurea in fisica A.A 2018/2019 Canali A C, L Pa, Pb Z
 Geometria Appello I Sessione Invernale Corso di laurea in fisica A.A 8/9 Canali A C, L Pa, Pb Z Durata: ore e 3 minuti Alessandro D Andrea Simone Diverio Paolo Piccinni Riccardo Salvati Manni 5 giugno
Geometria Appello I Sessione Invernale Corso di laurea in fisica A.A 8/9 Canali A C, L Pa, Pb Z Durata: ore e 3 minuti Alessandro D Andrea Simone Diverio Paolo Piccinni Riccardo Salvati Manni 5 giugno
CORSO DI FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA - LAUREA IN INGEGNERIA AMBIENTE-TERRITORIO Padova I Appello TEMA n.1
 CORSO DI FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA - LAUREA IN INGEGNERIA AMBIENTE-TERRITORIO Padova 16-06-2012 I Appello TEMA n.1 Esercizio 1. (a) In R 3 dotato del prodotto scalare usuale, si consideri
CORSO DI FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA - LAUREA IN INGEGNERIA AMBIENTE-TERRITORIO Padova 16-06-2012 I Appello TEMA n.1 Esercizio 1. (a) In R 3 dotato del prodotto scalare usuale, si consideri
LAUREA IN INGEGNERIA CIVILE ED AMBIENTE-TERRITORIO Corso di Matematica 2 Padova TEMA n.1
 LAUREA IN INGEGNERIA CIVILE ED AMBIENTE-TERRITORIO Corso di Matematica Padova -8-8 TEMA n.1 PARTE 1. Quesiti preliminari Stabilire se le seguenti affermazioni sono vere o false giustificando brevemente
LAUREA IN INGEGNERIA CIVILE ED AMBIENTE-TERRITORIO Corso di Matematica Padova -8-8 TEMA n.1 PARTE 1. Quesiti preliminari Stabilire se le seguenti affermazioni sono vere o false giustificando brevemente
LAUREA IN INGEGNERIA CIVILE Corso di Matematica 2 II a prova di accertamento Padova Docenti: Chiarellotto - Cantarini TEMA n.
 LAUREA IN INGEGNERIA CIVILE Corso di Matematica II a prova di accertamento Padova 10-1-07 Docenti: Chiarellotto - Cantarini TEMA n.1 PARTE 1. Quesiti preliminari Stabilire se le seguenti affermazioni sono
LAUREA IN INGEGNERIA CIVILE Corso di Matematica II a prova di accertamento Padova 10-1-07 Docenti: Chiarellotto - Cantarini TEMA n.1 PARTE 1. Quesiti preliminari Stabilire se le seguenti affermazioni sono
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
NOME COGNOME MATRICOLA CANALE
 NOME COGNOME MATRICOLA CANALE Fondamenti di Algebra Lineare e Geometria Proff. R. Sanchez - T. Traetta - C. Zanella Ingegneria Gestionale, Meccanica e Meccatronica, dell Innovazione del Prodotto, Meccatronica
NOME COGNOME MATRICOLA CANALE Fondamenti di Algebra Lineare e Geometria Proff. R. Sanchez - T. Traetta - C. Zanella Ingegneria Gestionale, Meccanica e Meccatronica, dell Innovazione del Prodotto, Meccatronica
0 0 c. d 1. det (D) = d 1 d n ;
 = d 1 d n ;") Registro Lezione di Algebra lineare del 23 novembre 216 1 Matrici diagonali 2 Autovettori e autovalori 3 Ricerca degli autovalori, polinomio caratteristico 4 Ricerca degli autovettori, autospazi 5 Matrici
Registro Lezione di Algebra lineare del 23 novembre 216 1 Matrici diagonali 2 Autovettori e autovalori 3 Ricerca degli autovalori, polinomio caratteristico 4 Ricerca degli autovettori, autospazi 5 Matrici
Compiti di geometria & algebra lineare. Anno: 2004
 Compiti di geometria & algebra lineare Anno: 24 Anno: 24 2 Primo compitino di Geometria e Algebra 7 novembre 23 totale tempo a disposizione : 3 minuti Esercizio. [8pt.] Si risolva nel campo complesso l
Compiti di geometria & algebra lineare Anno: 24 Anno: 24 2 Primo compitino di Geometria e Algebra 7 novembre 23 totale tempo a disposizione : 3 minuti Esercizio. [8pt.] Si risolva nel campo complesso l
Geometria Appello I Sessione Invernale Corso di laurea in fisica A.A 2018/2019 Canali A C, L Pa, Pb Z
 Geometria Appello I Sessione Invernale Corso di laurea in fisica A.A 208/209 Canali A C, L Pa, Pb Z Durata: 2 ore e 30 minuti Alessandro D Andrea Simone Diverio Paolo Piccinni Riccardo Salvati Manni 2
Geometria Appello I Sessione Invernale Corso di laurea in fisica A.A 208/209 Canali A C, L Pa, Pb Z Durata: 2 ore e 30 minuti Alessandro D Andrea Simone Diverio Paolo Piccinni Riccardo Salvati Manni 2
Facoltà di Scienze Statistiche, Algebra Lineare 1 A, G. Parmeggiani - Programma
 Facoltà di Scienze Statistiche, Algebra Lineare 1 A, G. Parmeggiani - Programma Il testo di riferimento è: Appunti di Algebra Lineare, Gregorio, Parmeggiani, Salce 06/12/04 Matrici. Esempi. Tipi particolari
Facoltà di Scienze Statistiche, Algebra Lineare 1 A, G. Parmeggiani - Programma Il testo di riferimento è: Appunti di Algebra Lineare, Gregorio, Parmeggiani, Salce 06/12/04 Matrici. Esempi. Tipi particolari
Applicazioni lineari e diagonalizzazione
 Autovalori e autovettori Matrici associate a applicazioni lineari Endomorfismi semplici e matrici diagonalizzabili Prodotti scalari e Teorema Spettrale nel caso generale 2 2006 Politecnico di Torino 1
Autovalori e autovettori Matrici associate a applicazioni lineari Endomorfismi semplici e matrici diagonalizzabili Prodotti scalari e Teorema Spettrale nel caso generale 2 2006 Politecnico di Torino 1
Algebra lineare. Prova scritta - 22 gennaio 2019
 Algebra lineare Anno accademico 28/9 Prova scritta - 22 gennaio 29 Nome: Cognome: Numero di matricola: Canale: A-L (Fiorenza-De Concini) M-Z (Mondello) Esame completo Secondo esonero (solo esercizi 3-4)
Algebra lineare Anno accademico 28/9 Prova scritta - 22 gennaio 29 Nome: Cognome: Numero di matricola: Canale: A-L (Fiorenza-De Concini) M-Z (Mondello) Esame completo Secondo esonero (solo esercizi 3-4)
Università degli Studi Roma Tre - Corso di Laurea in Matematica Tutorato di Geometria 1
 Università degli Studi Roma Tre - Corso di Laurea in Matematica Tutorato di Geometria 1 A.A. 28-29 - Docente: Prof. E. Sernesi Tutori: Andrea Abbate e Matteo Acclavio Soluzioni del tutorato numero 1 14
Università degli Studi Roma Tre - Corso di Laurea in Matematica Tutorato di Geometria 1 A.A. 28-29 - Docente: Prof. E. Sernesi Tutori: Andrea Abbate e Matteo Acclavio Soluzioni del tutorato numero 1 14
SPAZI VETTORIALI CON PRODOTTO SCALARE A =
 SPAZI VETTORIALI CON PRODOTTO SCALARE Esercizi Esercizio. Nello spazio euclideo standard (R 2,, ) sia data la matrice 2 3 A = 3 2 () Determinare una base rispetto alla quale A sia la matrice di un endomorfismo
SPAZI VETTORIALI CON PRODOTTO SCALARE Esercizi Esercizio. Nello spazio euclideo standard (R 2,, ) sia data la matrice 2 3 A = 3 2 () Determinare una base rispetto alla quale A sia la matrice di un endomorfismo
Corso di Laurea in Matematica - Esame di Geometria UNO. Prova scritta del 22 gennaio 2015
 Corso di Laurea in Matematica - Esame di Geometria UNO Prova scritta del 22 gennaio 2015 Cognome Nome Numero di matricola Corso (A o B) Voto ATTENZIONE. Riportare lo svolgimento completo degli esercizi.
Corso di Laurea in Matematica - Esame di Geometria UNO Prova scritta del 22 gennaio 2015 Cognome Nome Numero di matricola Corso (A o B) Voto ATTENZIONE. Riportare lo svolgimento completo degli esercizi.
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria: Elettronica. Corso di Geometria ed Algebra Docente F. Flamini
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria: Elettronica Corso di Geometria ed Algebra Docente F. Flamini Capitolo IV - 3: Teorema Spettrale degli operatori autoaggiunti e Teorema
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria: Elettronica Corso di Geometria ed Algebra Docente F. Flamini Capitolo IV - 3: Teorema Spettrale degli operatori autoaggiunti e Teorema
Algebra Prof. A. D Andrea Quinto scritto
 Algebra Prof. A. D Andrea Quinto scritto 20 SETTEMBRE 2018 Nome e Cognome: Numero di Matricola: Esercizio Punti totali Punteggio 1 7 2 7 3 7 4 12 Totale 33 Occorre motivare le risposte. Una soluzione corretta
Algebra Prof. A. D Andrea Quinto scritto 20 SETTEMBRE 2018 Nome e Cognome: Numero di Matricola: Esercizio Punti totali Punteggio 1 7 2 7 3 7 4 12 Totale 33 Occorre motivare le risposte. Una soluzione corretta
Esercizi 2. Soluzioni. 1. Siano dati i vettori 1 1, 1 R 3.
 Esercizi. Soluzioni.. Siano dati i vettori,, R. (i) Far vedere che formano una base di R. (ii) Ortonormalizzarla col metodo di Gram-Schmidt. (iii) Calcolare le coordinate del vettore X = 5 Sol. (i) Usiamo
Esercizi. Soluzioni.. Siano dati i vettori,, R. (i) Far vedere che formano una base di R. (ii) Ortonormalizzarla col metodo di Gram-Schmidt. (iii) Calcolare le coordinate del vettore X = 5 Sol. (i) Usiamo
AUTOVALORI, AUTOVETTORI, AUTOSPAZI
 AUTOVALORI, AUTOVETTORI, AUTOSPAZI. Esercizi Esercizio. Sia f : R 3 R 3 l endomorfismo definito da f(x, y, z) = (x+y, y +z, x+z). Calcolare gli autovalori ed una base per ogni autospazio di f. Dire se
AUTOVALORI, AUTOVETTORI, AUTOSPAZI. Esercizi Esercizio. Sia f : R 3 R 3 l endomorfismo definito da f(x, y, z) = (x+y, y +z, x+z). Calcolare gli autovalori ed una base per ogni autospazio di f. Dire se
Corso di Geometria Ing. Informatica e Automatica Test 1: soluzioni
 Corso di Geometria Ing. Informatica e Automatica Test : soluzioni k Esercizio Data la matrice A = k dipendente dal parametro k, si consideri il k sistema lineare omogeneo AX =, con X = x x. Determinare
Corso di Geometria Ing. Informatica e Automatica Test : soluzioni k Esercizio Data la matrice A = k dipendente dal parametro k, si consideri il k sistema lineare omogeneo AX =, con X = x x. Determinare
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA INDUSTRIALE 27 GENNAIO 2014
 FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA INDUSTRIALE 27 GENNAIO 2014 DOCENTE: MATTEO LONGO Rispondere alle domande di Teoria in modo esauriente e completo. Svolgere il maggior numero di esercizi
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA INDUSTRIALE 27 GENNAIO 2014 DOCENTE: MATTEO LONGO Rispondere alle domande di Teoria in modo esauriente e completo. Svolgere il maggior numero di esercizi
Esame di Geometria e Algebra Lineare Politecnico di Milano Ingegneria informatica Appello 15 Settembre 2015 Cognome: Nome: Matricola:
 Esame di Geometria e Algebra Lineare Politecnico di Milano Ingegneria informatica Appello 5 Settembre 5 Cognome: Nome: Matricola: Tutte le risposte devono essere motivate. Gli esercizi vanno svolti su
Esame di Geometria e Algebra Lineare Politecnico di Milano Ingegneria informatica Appello 5 Settembre 5 Cognome: Nome: Matricola: Tutte le risposte devono essere motivate. Gli esercizi vanno svolti su
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA CHIMICA E DEI MATERIALI 8 LUGLIO 2015
 FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA CHIMICA E DEI MATERIALI 8 LUGLIO 2015 MATTEO LONGO Svolgere entrambe le parti (Teoria ed Esercizi Si richiede la sufficienza su entrambe le parti 1
FONDAMENTI DI ALGEBRA LINEARE E GEOMETRIA INGEGNERIA CHIMICA E DEI MATERIALI 8 LUGLIO 2015 MATTEO LONGO Svolgere entrambe le parti (Teoria ed Esercizi Si richiede la sufficienza su entrambe le parti 1
0. Introduzione al linguaggio matematico
 Prof. Lidia Angeleri Università di Verona, 2013/14 Algebra Lineare ed Elementi di Geometria (Programma aggiornato in data 23 gennaio 2014) 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Prof. Lidia Angeleri Università di Verona, 2013/14 Algebra Lineare ed Elementi di Geometria (Programma aggiornato in data 23 gennaio 2014) 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
CORSO DI ALGEBRA (M-Z) Prof. A. Venezia
 Prof. A. Venezia") CORSO DI ALGEBRA (M-Z) Prof. A. Venezia 2015-16 Complementi ed Esercizi 1. AUTOVETTORI e AUTOVALORI di ENDOMORFISMI e MATRICI Una applicazione lineare avente per dominio e condominio lo stesso spazio vettoriale
CORSO DI ALGEBRA (M-Z) Prof. A. Venezia 2015-16 Complementi ed Esercizi 1. AUTOVETTORI e AUTOVALORI di ENDOMORFISMI e MATRICI Una applicazione lineare avente per dominio e condominio lo stesso spazio vettoriale
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura IV Appello corso di Geometria Docente F. Flamini, Roma, 3/7/ NORME SVOLGIMENTO Scrivere negli appositi
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura IV Appello corso di Geometria Docente F. Flamini, Roma, 3/7/ NORME SVOLGIMENTO Scrivere negli appositi
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura II Appello corso di Geometria Docente F. Flamini, Roma, // NORME SVOLGIMENTO Scrivere negli appositi
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria - CCS Edilizia ed Edile/Architettura II Appello corso di Geometria Docente F. Flamini, Roma, // NORME SVOLGIMENTO Scrivere negli appositi
GE210 Geometria e algebra lineare 2 A.A. 2018/2019
 GE210, I Semestre, Crediti 9 GE210 Geometria e algebra lineare 2 A.A. 2018/2019 Prof. Angelo Felice Lopez 1. Forme bilineari e forme quadratiche Forme bilineari, simmetriche ed antisimmetriche. Esempi:
GE210, I Semestre, Crediti 9 GE210 Geometria e algebra lineare 2 A.A. 2018/2019 Prof. Angelo Felice Lopez 1. Forme bilineari e forme quadratiche Forme bilineari, simmetriche ed antisimmetriche. Esempi:
Note per il corso di Geometria Corso di laurea in Ing. Elettronica e delle Telecomunicazioni
 Note per il corso di Geometria 9- Corso di laurea in Ing. Elettronica e delle Telecomunicazioni Prodotto scalare e matrici simmetriche. Il prodotto scalare consente di introdurre in uno spazio vettoriale
Note per il corso di Geometria 9- Corso di laurea in Ing. Elettronica e delle Telecomunicazioni Prodotto scalare e matrici simmetriche. Il prodotto scalare consente di introdurre in uno spazio vettoriale
Endomorfismi e matrici simmetriche
 CAPITOLO Endomorfismi e matrici simmetriche Esercizio.. [Esercizio 5) cap. 9 del testo Geometria e algebra lineare di Manara, Perotti, Scapellato] Calcolare una base ortonormale di R 3 formata da autovettori
CAPITOLO Endomorfismi e matrici simmetriche Esercizio.. [Esercizio 5) cap. 9 del testo Geometria e algebra lineare di Manara, Perotti, Scapellato] Calcolare una base ortonormale di R 3 formata da autovettori
Prodotto scalare e matrici < PX,PY >=< X,Y >
 Prodotto scalare e matrici Matrici ortogonali Consideriamo in R n il prodotto scalare canonico < X,Y >= X T Y = x 1 y 1 + +x n y n. Ci domandiamo se esistono matrici P che conservino il prodotto scalare,
Prodotto scalare e matrici Matrici ortogonali Consideriamo in R n il prodotto scalare canonico < X,Y >= X T Y = x 1 y 1 + +x n y n. Ci domandiamo se esistono matrici P che conservino il prodotto scalare,
Appunti di Geometria - 2
 Appunti di Geometria - Samuele Mongodi - s.mongodi@sns.it Cambi di base e applicazioni lineari Richiami Sia V uno spazio vettoriale di dimensione n sul campo K, con base assegnata e,..., e n } (ad esempio
Appunti di Geometria - Samuele Mongodi - s.mongodi@sns.it Cambi di base e applicazioni lineari Richiami Sia V uno spazio vettoriale di dimensione n sul campo K, con base assegnata e,..., e n } (ad esempio
A.A. 2014/2015 Corso di Algebra Lineare
 A.A. 2014/2015 Corso di Algebra Lineare Stampato integrale delle lezioni Massimo Gobbino Indice Lezione 01: Vettori geometrici nel piano cartesiano. Operazioni tra vettori: somma, prodotto per un numero,
A.A. 2014/2015 Corso di Algebra Lineare Stampato integrale delle lezioni Massimo Gobbino Indice Lezione 01: Vettori geometrici nel piano cartesiano. Operazioni tra vettori: somma, prodotto per un numero,
Forme bilineari e prodotti scalari
 Forme bilineari e prodotti scalari Il prodotto scalare standard di R n può anche essere scritto come un prodotto riga per colonna u, v R n = u t Iv dove I è la matrice identità. Possiamo generalizzare
Forme bilineari e prodotti scalari Il prodotto scalare standard di R n può anche essere scritto come un prodotto riga per colonna u, v R n = u t Iv dove I è la matrice identità. Possiamo generalizzare
0.1 Coordinate in uno spazio vettoriale
 0.. COORDINATE IN UNO SPAZIO VETTORIALE 0. Coordinate in uno spazio vettoriale Sia V uno spazio vettoriale di dimensione finita n costruito sul campo K. D ora in poi, ogni volta che sia fissata una base
0.. COORDINATE IN UNO SPAZIO VETTORIALE 0. Coordinate in uno spazio vettoriale Sia V uno spazio vettoriale di dimensione finita n costruito sul campo K. D ora in poi, ogni volta che sia fissata una base
UNIVERSITÀ DEGLI STUDI ROMA TRE Corso di Laurea in Matematica GE210 - Geometria 2 a.a Prova scritta del TESTO E SOLUZIONI
 UNIVERSITÀ DEGLI STUDI ROMA TRE Corso di Laurea in Matematica GE0 - Geometria a.a. 08-09 Prova scritta del 0--09 TESTO E SOLUZIONI Svolgere tutti gli esercizi.. Sia V uno spazio vettoriale reale di dimensione
UNIVERSITÀ DEGLI STUDI ROMA TRE Corso di Laurea in Matematica GE0 - Geometria a.a. 08-09 Prova scritta del 0--09 TESTO E SOLUZIONI Svolgere tutti gli esercizi.. Sia V uno spazio vettoriale reale di dimensione
Diagonalizzazione di matrici: autovalori, autovettori e costruzione della matrice diagonalizzante 1 / 13
 Diagonalizzazione di matrici: autovalori, autovettori e costruzione della matrice diagonalizzante 1 / 13 Matrici diagonali 2 / 13 Ricordiamo che una matrice quadrata si dice matrice diagonale se a ij =
Diagonalizzazione di matrici: autovalori, autovettori e costruzione della matrice diagonalizzante 1 / 13 Matrici diagonali 2 / 13 Ricordiamo che una matrice quadrata si dice matrice diagonale se a ij =
Programma del corso Geometria 1 Sapienza-Università di Roma Ingegneria Civile, Ambiente e Territorio a.a. 2017/2018 Docente: Prof.
 Programma del corso Geometria 1 Sapienza-Università di Roma Ingegneria Civile, Ambiente e Territorio a.a. 2017/2018 Docente: Prof. Giovanni Cerulli Irelli Programma di massima Sistemi di equazioni lineari
Programma del corso Geometria 1 Sapienza-Università di Roma Ingegneria Civile, Ambiente e Territorio a.a. 2017/2018 Docente: Prof. Giovanni Cerulli Irelli Programma di massima Sistemi di equazioni lineari
(VX) (F) Se A e B sono due matrici simmetriche n n allora anche A B è una matrice simmetrica.
 (F) Se A e B sono due matrici simmetriche n n allora anche A B è una matrice simmetrica.") 5 luglio 010 - PROVA D ESAME - Geometria e Algebra T NOME: MATRICOLA: a=, b=, c= Sostituire ai parametri a, b, c rispettivamente la terzultima, penultima e ultima cifra del proprio numero di matricola
5 luglio 010 - PROVA D ESAME - Geometria e Algebra T NOME: MATRICOLA: a=, b=, c= Sostituire ai parametri a, b, c rispettivamente la terzultima, penultima e ultima cifra del proprio numero di matricola
; c. ; d nessuna delle precedenti
 Ing. aerospaziale e meccanica. Geometria e algebra T. Prova del 11/07/2018 cod. 8102170 Nome Cognome Matricola 1. La conica di equazione x + y 2 + 2y + 1 = 0 è: a un ellisse; b un iperbole; c una parabola;
Ing. aerospaziale e meccanica. Geometria e algebra T. Prova del 11/07/2018 cod. 8102170 Nome Cognome Matricola 1. La conica di equazione x + y 2 + 2y + 1 = 0 è: a un ellisse; b un iperbole; c una parabola;
PROVA SCRITTA DI GEOMETRIA 2 MATEMATICA, 20/09/2011
 PROVA SCRITTA DI GEOMETRIA 2 MATEMATICA, 20/09/2011 In questo elenco, la presenza di esercizi relativi ai singoli argomenti non è correlata alla loro rilevanza, né alla ricorrenza nella prova scritta.
PROVA SCRITTA DI GEOMETRIA 2 MATEMATICA, 20/09/2011 In questo elenco, la presenza di esercizi relativi ai singoli argomenti non è correlata alla loro rilevanza, né alla ricorrenza nella prova scritta.
2 Sistemi lineari. Metodo di riduzione a scala.
 Sistemi lineari. Metodo di riduzione a scala. Esercizio.1 Utilizzando il metodo di eliminazione di Gauss, risolvere i seguenti sistemi lineari: 1. 3. x 1 x + 3x 3 = 1 x 1 x x 3 = x 1 + x + 3x 3 = 5 x 1
Sistemi lineari. Metodo di riduzione a scala. Esercizio.1 Utilizzando il metodo di eliminazione di Gauss, risolvere i seguenti sistemi lineari: 1. 3. x 1 x + 3x 3 = 1 x 1 x x 3 = x 1 + x + 3x 3 = 5 x 1
Docente Dipartimento di Fisica Ore didattica assegnate 2016/17 Registro del docente PIGNATELLI ROBERTO. Ore didattica assegnate. Altre ore assegnate
 Docente Dipartimento di Fisica Ore didattica assegnate 2016/17 Registro del docente PIGNATELLI ROBERTO Tipo copertura: docente strutturato Attività didattica: Attività didattica [codice] Corso di studio
Docente Dipartimento di Fisica Ore didattica assegnate 2016/17 Registro del docente PIGNATELLI ROBERTO Tipo copertura: docente strutturato Attività didattica: Attività didattica [codice] Corso di studio
UNIVERSITÀ DEGLI STUDI ROMA TRE Corso di Laurea in Matematica GE110 - Geometria 1 a.a Seconda prova di esonero TESTO E SOLUZIONI
 UNIVERSITÀ DEGLI STUDI ROMA TRE Corso di Laurea in Matematica GE110 - Geometria 1 a.a. 2014-2015 Seconda prova di esonero TESTO E SOLUZIONI 1. Sia V uno spazio vettoriale di dimensione 4 con base {e 1,
UNIVERSITÀ DEGLI STUDI ROMA TRE Corso di Laurea in Matematica GE110 - Geometria 1 a.a. 2014-2015 Seconda prova di esonero TESTO E SOLUZIONI 1. Sia V uno spazio vettoriale di dimensione 4 con base {e 1,
Spazi vettoriali euclidei.
 Spazi vettoriali euclidei Prodotto scalare, lunghezza e ortogonalità in R n Consideriamo lo spazio vettoriale R n = { =,,, n R}, n con la somma fra vettori e il prodotto di un vettore per uno scalare definiti
Spazi vettoriali euclidei Prodotto scalare, lunghezza e ortogonalità in R n Consideriamo lo spazio vettoriale R n = { =,,, n R}, n con la somma fra vettori e il prodotto di un vettore per uno scalare definiti