Esercitazione 7: Fattorizzazione QR e Minimi quadrati.
|
|
|
- Raffaella Marra
- 7 anni fa
- Visualizzazioni
Transcript
1 Esercitazione 7: Fattorizzazione QR e Minimi quadrati. Richiami di Teoria Teorema: Data una matrice A R m n, (m n), esiste una matrice ortogonale Q R m m (QQ T = Q T Q = I) tale che ( ) R1 A = QR = Q, 0 dove R R m n con r i,j = 0, i > j (R 1 R n n è triangolare superiore). Osservazione 0: La matrice Q è ortogonale e questo significa che la sua inversa coincide con la trasposta, cioè Q 1 = Q T. Osservazione 1: Se il rango di A è n (massimo), allora R 1 è non singolare. Osservazione 2: La fattorizzazione QR è anche usata per risolvere sistemi lineari sovra- e sotto-determinati nel senso dei minimi quadrati (argomento non ancora trattato). Ma può essere usata anche per sistemi quadrati. Infatti si può scrivere { Qy = b y = Q A = QR = Ax = QRx = b T b Rx = y Osservazione 3: La routine MatLab che implementa la fattorizzazione QR è qr. Esercizio 1 Fattorizzazione QR di una matrice. Risolvere il sistema lineare Ax = b mediante l uso della fattorizzazione QR, dove A = e b è scelto in modo tale che il vettore soluzione x sia il vettore di tutti 1. 1
, allora R 1 è non singolare.")
2 Richiami di Teoria Riflettore elemetare di Householder. Definiamo un tipo speciale di matrice ortogonale e simmetrica H (H T = H 1 = H) detta matrice di riflessione di Householder. Sia u R n un vettore normalizzato ( u 2 = 1), allora è possibile definire la seguente matrice che risulta essere simmetrica ed ortogonale. Interpretazione geometrica H = I 2uu T Moltiplicare una matrice di riflessione per un vettore è equivalente a riflettere tale vettore attraverso l iperpiano perpendicolare ad u. Sia Π l iperpiano ortogonale ad u, sia x un vettore ed y = Hx il vettore trasformato, ovvero si ha che y = Hx = (I 2uu T )x = x 2(u T x)u dove u T x è la componente di x nella direzione di u e x y = 2(u T x)u per la regola del parallelogramma. Sia veda la figura sottostante per un interpretazione grafica nello spazio R 2 con u = e 1 = (1, 0) T e x = (1/2, 1/4) T. 2 / 21
x = x 2(u T x)u dove u T x è la componente di x nella direzione di u e x y =")
3 Riflessione lungo il primo vettore canonico Se x R n è un vettore non nullo, allora esiste sempre una matrice di riflessione di Householder H = I 2uu T ed un numero reale α tali che Hx = αe 1 dove e 1 = (1, 0,..., 0) T è il primo vettore della base canonica di R n. Il vettore u ed il valore α sono ottenuti come : α = sign(x 1 ) x 2 v = x + αe 1 u = v v 2 H = I 2 vvt v T v = I 2 vvt v 2 2 con x 1 prima componente di x. Esercizio 2 = I 2uu T Scrivere una routine MatLab per calcolare il riflettore elementare di Householder. L algoritmo riceve in ingresso il vettore x e restituisce in uscita la matrice H. H HRiflettore ( x ) 1 α sign(x 1 ) x 2 2 v x + αe 1 3 u v v 2 4 H I 2uu T Nota: Attenzione alla funzione sign di MatLab che restituisce 0 se in ingresso viene passato uno zero. e 1 può essere generatore come eye(n,1). Generare la matrice di riflessione H relativa alla prima colonna della matrice A = / 21

4 e calcolare HA ottenendo come risultato HA = Fattorizzazione QR di una marice A mediante uso dei riflettori di Householder. Una matrice A di ordine m n viene trasformata in una matrice triangolare superiore mediante l applicazione successiva di trasformazioni elementari di Householder. Ad esempio, per m = 6 e n = 5 supponiamo di aver già calcolato due matrici di trasformazione H 1 e H 2 tali che: 0 H 2 H 1 A = 0 0 x 0 0 x 0 0 x 0 0 x ed allora cerchiamo una matrice di Householder H 3 di ordine 4 4 tale che x y H 3 x x = 0 0. x 0 Allora poniamo quindi H 3 = diag(i 2, H 3 ), ottenendo: 0 H 3 H 2 H 1 A = 0 0 y Alla fine H n H n 1 H 1 A = R è una matrice triangolare superiore e ponendo Q = H 1 H n si ottiene A = QR. 4 / 21

5 Esercizio 3 Scrivere una routine MatLab per calcolare la fattorizzazione QR di una matrice generica A mediante l uso dei riflettori elementari di Householder. L algoritmo riceve in ingresso la matrice A e restituisce in uscita le matrici Q ed R. [Q, R] QRwithH ( A ) 1 [m,n] size ( A ) 2 // inizializzazione di R uguale ad A 3 R A 4 // inizializzazione di Q pari a identita di dimensione m 5 Q I m 6 // calcolo quante matrici di Householder devo calcolare : 7 // minimo tra m-1 e n 8 d min(m 1, n) 9 // ciclo sulle possibili matrici elementari 10 for k 1 to d 11 // estraggo vettore x della trasformazione elementare dalla matrice R 12 x (r k,k, r k+1,k,..., r m,k ) T 13 // costruisco matrice elementare di Householder 14 P HRiflettore ( x ) 15 // costruisco matrice H 16 H I m 17 H k...m,k...m H 18 // aggiorno R 19 R H R 20 // aggiorno Q 21 Q Q H 22 end Come esempio si consideri la seguente matrice: A = / 21
![[Q, R] QRwithH ( A ) 1 [m,n] size ( A ) 2 // inizializzazione di R uguale ad A 3 R A 4 // inizializzazione di Q pari a identita di dimensione m 5 Q I m 6 // calcolo quante matrici di Householder devo](/docs-images/49/21001137/images/page_5.jpg "calcolare : 7 // minimo tra m-1 e n 8 d min(m 1, n) 9 // ciclo sulle possibili matrici elementari 10 for k 1 to d 11 // estraggo vettore x della trasformazione elementare dalla matrice R 12 x (r k,k,")
6 Risultati A = Q = R = / 21
7 Richiami di Teoria Minimi quadrati (retta di regressione). Siano dati m punti (x i, y i ), 1 i m. Sia p(x) = a 0 + a 1 x il polinomio (lineare) di grado n = 1 con cui vogliamo approssimare i dati. Il problema dei minimi quadrati consiste nel rendere minima la seguente quantità (scarti al quadrato): m m S = d(p, a 0, a 1 ) = (p(x i ) y i ) 2 = (a 0 + a 1 x i y i ) 2 i=1 La quantità S è la somma dei quadrati degli scarti verticali e risulta essere anche una funzione derivabile. Il minimo della funzione S è un punto di stazionarietà. Valgono perciò le seguenti condizioni (necessarie e sufficienti) dette equazioni normali: cioè perciò avremo S a r = 2 S a r = 0 i=1 r = 0,..., n m (a 0 + a 1 x i )x r i = 0 r = 0,..., n i=1 m (a 0 + a 1 x i )x r i = i=1 m y i x r i i=1 r = 0,..., n ed in forma matriciale ( m m i=1 x i m i=1 x i m i=1 x2 i ) ( a0 a 1 ) = ( m i=1 y ) i m i=1 y. ix i Il sistema precedente può essere riscritto nella forma definendo 1 x 1 1 x 2 A =.., a = 1 x m A T Aa = A T y ( a0 a 1 ) e y = y 1 y 2. y m. Con queste definizioni il problema originario può essere formulato come segue: min Aa y 2 a R 2 2. Nel caso generale di un approssimazione mediante un polinomio della forma p(x) = a 0 + a 1 x + a 2 x a n x n 7 / 21
 dette equazioni normali: cioè perciò avremo S a r = 2 S a r = 0 i=1 r = 0,..., n m (a 0 + a 1 x i )x r i = 0 r = 0,.")
8 la matrice A assume la forma 1 x 1 x x n 1 1 x 1 x x n 2 A =.. 1 x 1 x 2 m... x n m e viene detta matrice di Vandermonde; Tale matrice risulta essere mal condizionata. Soluzione del sistema delle equazioni normali 1 Utilizzando Cholesky Nel caso generale n > 1, il sistema delle equazioni normali A T Ax = A T b con A R m n, essendo simmetrico e definito positivo (se rango di A massimo cioè punti x i distinti) si può risolvere tramite la fattorizzazione di Cholesky della matrice A T A = L T L, da cui A T Ax = A T b L(L T x) = A T b { Ly = A T b sost. avanti L T x = y sost. indietro In aritmetica finita la matrice A T A può essere malcondizionata (ed eventualmente con numero di condizionamento elevato) in quanto gli inevitabili errori di arrotondamento possono portare a matrici le cui colonne sono linearmente dipendenti. Quindi è preferibile utilizzare per la risoluzione numerica o la fattorizzazone QR o la fattorizzazione SVD. Utilizzando QR Un metodo che evita questo inconveniente perchè usa direttamente la matrice A è offerto dalla fattorizzazione QR, da cui Ax b 2 = QRx b 2 = Q(Rx Q T b) 2 = Rx Q T b 2. La matrice R ha la forma R = ( R1 0 ) n righe m n righe con R 1 una matrice triangolare superiore non singolare in quanto A ha rango massimo. Ponendo c = Q T b e partizionandolo coerentemente con la partizione di R, ossia c = ( c1 c 2 ) n componenti m n componenti 1 Sistema con un numero maggiore di righe rispetto alle incognite quindi si tratta di un sistema sovradeterminato. 8 / 21

9 abbiamo ( R1 x c Rx c = 1 c 2 ) n componenti m n componenti Quindi il problema di minimo diventa min Ax x R b 2 n 2 = min Rx x R c 2 n 2 = min [ R1 x c 1 2 x R n 2 + c 2 2 ] 2 = c min x R n R 1x c Poiché R 1 è non singolare, la soluzione x del sistema lineare è tale che R 1 x = c 1 min R 1x c 1 2 x R n 2 = R 1x c = 0. Ne segue che x è soluzione del problema di minimo ed inoltre min Ax x R b 2 n 2 = c Osservazione: Se la matrice A non ha rango massimo, la mtrice R 1 ottenuta ha almeno un elemento diagonale nullo e quindi non è possibile calcolare la soluzione del sistema lineare R 1 x = c 1. Questa difficoltà viene superata applicando il metodo QR con la tecnica del massimo pivot per colonne (QR con pivoting) e associare alla variabile il cui elemento è zero (o vicino a zero) il valore zero. Utilizzando SVD Teorema: Data una matrice A R m n, esiste una fattorizzazione della forma con A = UΣV T, ˆ U una matrice unitaria di dimensioni m m; ˆ Σ una matrice diagonale di dimensioni m n che contiene i valori singolari σ 1 σ 2... σ p con p = min(m, n) della matrice A (i valori singolari σ i e gli autovalori di λ i di A T A, ordinati in modo decrescente, sono legati dalla seguente relazione σ i = λ i ); ˆ V una matrice unitaria di dimensioni n n; ˆ il comando MatLab che esegue la SVD è svd.. 9 / 21

10 Utilizzando la SVD abbiamo Ax b 2 = UΣV T x b 2 = U(ΣV T x U T b) 2 = per cui ponendo y = V T x e d = U T b si ha U(ΣV T x U T b) 2 = Σy d 2. La matrice Σ è della forma per cui partizionando d i nella forma coerentemente con Σ si ha: Σ = ( diag(σi ) 0 d = ( d1 d 2 ) ) min Ax x R b 2 n 2 = Σy d 2 2 = d min diag(σ i)y d 1 2 y R n 2 da cui y i = d i /σ i e quindi x = V y. 10 / 21
 0 d = ( d1 d 2 ) ) min Ax x R b 2 n 2 = Σy d 2 2 = d 2 2 2 + min diag(σ i)y d 1 2 y")
11 Esercizio 4 Siano dati le seguenti coppie di valori. x i y i = f(x i ) Si vuole calcolare la retta di regressione utilizzando : 1. la soluzione delle equazioni normali attraverso Cholesky; 2. mediante fattorizzazione QR della matrice; 3. mediante fattorizzazione SV D della matrice; 4. il comando \ di MatLab o Octave. La soluzione procede nel seguente modo: ˆ Scrivere una routine che costruisca la matrice A della retta di regressione ai minimi quadrati. L algoritmo riceve in ingresso il vettore x e restituisce in uscita la matrice A. A CostruisciA ( x ) 1 n length ( x ) 2 // affianco vettore di tutti 1 il vettore x per colonna 3 A [1 n x] ˆ (Risoluzione delle equazioni normali) Dato K = A T A e F = A T y si deve risolvere il sistema lineare 2 2 Ka = F sfruttando la fattorizzazione di Cholesky di K. Attenzione: La routine MatLab chol restituisce una matrice triangolare superiore, i.e. L T. ˆ (Risoluzione mediante QR) Dato la fattorizzazione QR di A si deve risolvere il sistema R 1 a = c 1 di dimensione 2 2, precisamente ˆ (Risoluzione mediante SVD) Data la fattorizzazione SVD di A si deve calcolare d = U T y, ŷ i = d i /σ i ed infine x = V ŷ. ˆ (Risoluzione mediante comando MatLab) si deve risolvere il sistema Aa = y. ˆ Visualizzare i risultati ottenuti (anche graficamente). 11 / 21

12 1 //calcola fattorizzazione QR 2 [Q, R] QRwithH ( A ) 3 c Q T y 4 c 1 (c 1,..., c n ) T 5 R 1 R 1 n,1 n 6 //calcolo soluzione di R 1 x = c 1 con sostituzione all indietro 7 a RisolviSistemaTriSup ( R 1, c 1 ) 12 / 21

13 Esercizio 5 Ripetere l esercizio precedente calcolando la parabola (polinomio di grado 2) che meglio approssima i dati. In questo caso la matrice A è della forma [1 n x x. 2 ] con n = 3 parametri. 13 / 21

14 Esercizio 6 Ripetere l esercizio precedente sul seguente insieme di dati (anche con x ripetute) x i y i = f(x i ) / 21
 18 7 5 0 2 7 16 10 50 67 70 14 / 21")
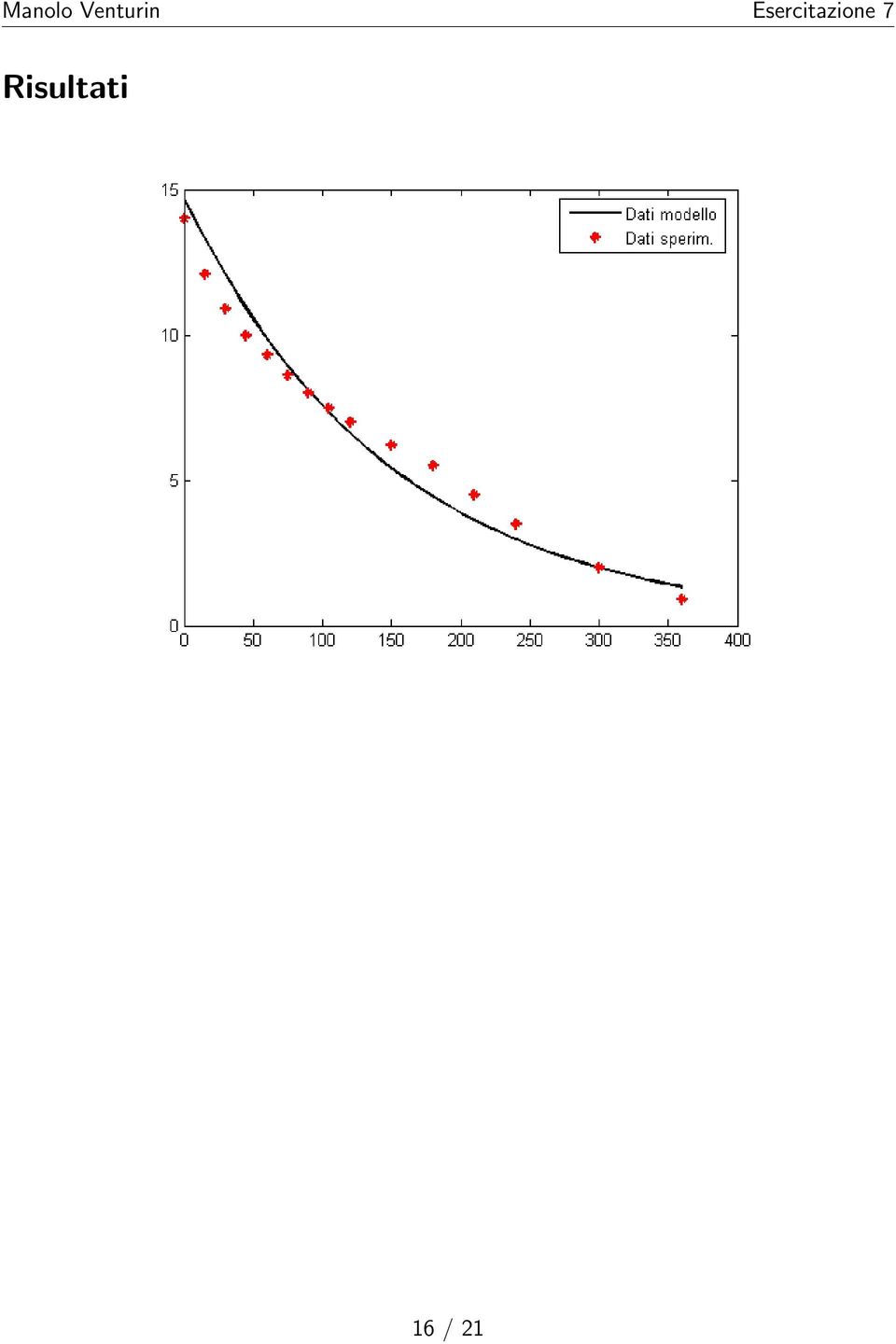
15 Esercizio 7 2 L equazione differenziale la cui soluzione analitica è dn dt = λn. N(t) = N 0 e λt. viene utilizzata per modellare fenomenti in cui una quantità (con N 0 quantità iniziale) decade e questo decadimento è proporzionale (con valore costante λ) alla quantità rimasta. Tipicamente dalle misure di laboratorio si hanno i valori di t i e N(t i ) cioè la quantità rimasta oppure t i e N(t i )/N 0 [%] cioè la percentuale di riduzione della quantità dopo un certo intervallo di tempo. Lo scopo dell approssimazione, in questo caso, è trovare i valore λ e N 0 che meglio descrivono (nel senso dei minimi quadrati) il fenomeno fisico. Per ricondurre il problema della ricerca dei parametri N 0 e λ di un modello non lineare (in questo caso esponenziale) possiamo considerare, in questo particolare caso, la versione in cui viene applicato il lagaritmo, cioè log(n(t)) = log(n 0 ) λt che diventa un problema di interpolazione polinomia quando i dati y i vengono trasformati mediante il logaritmo. Quindi per risolvere il problema eseguiamo i seguenti passi: ˆ defininamo il nostro modello polinomiale attraverso a 0 = log(n 0 ) e a 1 = λ; ˆ eseguiamo il logaritmo dei dati, cioè log(y i ); ˆ calcoliamo il polinomio (retta) di miglior approssimazione con il comando polyfit; ˆ calcoliamo N 0 e λ dai coefficienti del polinomio. Un esempio di fenomeno fisico che può essere descritto da un decadimento di tipo esponenziale è l andamento dell altezza della schiuma della birra 3 dove la legge di decadimento esponenziale può essere derivata dall ipotesi che la variazione della schiuma sia proporzionale al volume della schiuma presente mediante una relazione del tipo dv = (V/τ)dt = λdt con λ = τ. Nella tabella seguente sono riportati i valori medi relativi alla birra Budweiser Budvar t i [s] h i [cm] dove è riportato a diversi istanti temporali t i [s] il valore dell altezza della schiuma h i in [cm]. Calcolare il valore di λ e N 0. 2 Facoltativo. 3 Per maggiori dettagli si veda Demonstration of the exponential decay law using beer froth, di A. Leike, in European Journal of Physics, 23 (2002) pag / 21
![Tipicamente dalle misure di laboratorio si hanno i valori di t i e N(t i ) cioè la quantità rimasta oppure t i e N(t i )/N 0 [%] cioè la percentuale di riduzione della quantità dopo un certo](/docs-images/49/21001137/images/page_15.jpg "intervallo di tempo. Lo scopo dell approssimazione, in questo caso, è trovare i valore λ e N 0 che meglio descrivono (nel senso dei minimi quadrati) il fenomeno fisico.")
16 Risultati 16 / 21
17 Differenze tra soluzione con QR e SVD Nel risolvere il sistema delle equazioni normali nel caso in cui la matrice A ha rango massimo sia la fattorizzazione QR che la SVD portano ai medesimi risultati. In questo caso si preferisce utilizzare la fattorizzazione SVD in quanto è quella numericamente più stabile. Invece, la differenza tra QR e SVD si può apprezzare quando si richiede di risolvere, nel senso dei minimi quadrati, un sistema sotto determinato, cioè un sistema con un numero maggiore di incognite rispetto al numero di equazioni. Questo significa che ci sono più soluzioni che produco il minimo. Sia nel caso della QR che nella SVD si fissano a zero le variabili che non compaiono nella soluzione del sistema (si noti che nella fattorizzazione non si fissano le x a zero ma, nella nostra notazione le y) questo si traduce nel seguente fatto: la fattorizzazione QR realizza la soluzione con più zeri, cioè quella più sparsa mentre la fattorizzazione SVD si può dimostrare che realizza la soluzione x quella di norma minima ( x 2 2) cioè quella più vicina al vettore nullo. Ad esempio se consideriamo il seguente sistema lineare { x1 + 2x 2 + x 3 + x 4 = 2 ed utilizzando le seguenti istruzioni MatLab x 1 2x 2 + x 3 x 4 = 0 A = [ ; ]; b = [2 0]' % QR con pivoting e versione economica % [Q,R,E] = qr(a,0) c = Q'*b x qr = zeros(4,1); x qr(e(1:2)) = R(1:2,1:2)\c % SVD in versione economica % [U,S,V] = svd(a,0) d = U'*b z = zeros(4,1); z(1:2) = d./diag(s) x svd = V*z norm(x qr)ˆ2 norm(x svd)ˆ2 si hanno i seguenti risultati x_qr = / 21

18 % con norma x_svd = % con norma Esercizio 8 4 Un interessante applicazione della SVD è alla compressione delle immagini. Data una immagine o matrice A di dimensione m n la vogliamo approssimare rimuovendo informazione ridondante o meno significativa. L idea è di sfruttrare la fattorizzazione SVD ed eliminare i valori singolari piccoli; questo può essere spiegato dal fatto che i valori singolari sono ordinati in modo decrescente e valori singolari piccoli contribuiscono poco alla formazione della matrice risultante finale. Matematicamente vogliamo approssimare una matrice A con una matrice à di rango inferiore, diciamo r misurando l errore in norma di Frobenius cioè A à F. Grazie al teorema dimostrato da Eckart-Young (1936) per far questo basta considerare la decomposizione SVD della matrice A e considerare solo i primi r valori singolari. L errore che si commette è A à n F = σi 2. i=r+1 Nella figura sottostante è rappresentata la fattorizzazione SVD in versione economica dove sono mostrate solamente le matrici coinvolte nel risultato finale se si considerano solamente un numero limitato di valori singolari. Figura 1: Fattorizzazione SVD ridotta Attenzione che la scelta di r deve essere tale che il costo per la memorizzazione di U, Σ e V ridotte alle prime r componenti sia inferiore al costro di memorizzazione la matrice completa A. Il seguente codice mostra una bozza di codice MatLab per questa tipologia di applicazioni. L immagine test per eccellenza in queste applicazione è quella di lena. 4 Facoltativo. 18 / 21

19 close all clear all clc [A,map]= imread('lena.gif'); B = im2double(a,'indexed'); figure; imshow(b,map); [U,S,V]=svd(B); k = 128; C = zeros(size(b)); for j=1:k C = C + S(j,j)*U(:,j)*V(:,j)'; end % caricamento immagine % conversione in numeri reali % visualizzazione % decomposizione ai valori singolari % numero di valori singolari che vogliamo tenere figure; imshow(c,map); % visualizza immagine Si chiede di provare il codice per vedere come si comporta l algoritmo sui primi valori singolari. Risultati Nella prima figura vengono mostrati il valore dei singoli valori singolari. Figura 2: Valore dei valori singolari Nella figura successiva vengono mostrate (da sinistra verso destra e dall alto verso il basso) le prime 16 immagini ottenute dai primi 16 valori singolari. 19 / 21


20 Figura 3: Immagini da 1 a 16 valori singolari 20 / 21

.")
21 Figura 4: Confronto tra immagine originale (in alto) e l immagine con i primi 128 valori singolari (in basso). 21 / 21
b vettore(termine noto) y* proiezione ortogonale di b
 y* proiezione ortogonale di b") Carla Guerrini 1 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione
Carla Guerrini 1 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Sistemi sovradeterminati
 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione lineare di
Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione lineare di
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
n +1 determinanti (D i, i =1,...,n e det A) n! prodotti per ciascun determinante n 1 moltiplicazioni per ciascun prodotto
 n! prodotti per ciascun determinante n 1 moltiplicazioni per ciascun prodotto") METODI NUMERICI (A.A. 2007-2008) Prof. F.Pitolli Appunti delle lezioni sui sistemi lineari: metodi diretti; condizionamento Metodi diretti per la soluzione di sistemi lineari Metodi diretti Sono basati
METODI NUMERICI (A.A. 2007-2008) Prof. F.Pitolli Appunti delle lezioni sui sistemi lineari: metodi diretti; condizionamento Metodi diretti per la soluzione di sistemi lineari Metodi diretti Sono basati
Esercitazione 5: Sistemi a risoluzione immediata.
 Esercitazione 5: Sistemi a risoluzione immediata. Ipotesi: Supponiamo le matrici non singolari. Nota: Per verificare che si ha risolto correttamente il sistema lineare Ax = b basta calcolare la norma del
Esercitazione 5: Sistemi a risoluzione immediata. Ipotesi: Supponiamo le matrici non singolari. Nota: Per verificare che si ha risolto correttamente il sistema lineare Ax = b basta calcolare la norma del
Interpolazione polinomiale. Interpolazione polinomiale
 1 Polinomiale Rappresentazione Lagrangiana Polinomio interpolante di Newton Errore nell interpolazione polinomiale 2 Approssimazione ai minimi quadrati nel discreto 1 Polinomiale Rappresentazione Lagrangiana
1 Polinomiale Rappresentazione Lagrangiana Polinomio interpolante di Newton Errore nell interpolazione polinomiale 2 Approssimazione ai minimi quadrati nel discreto 1 Polinomiale Rappresentazione Lagrangiana
Daniela Lera A.A
 Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2014-2015 Metodi per similitudine Matrici simili hanno gli stessi autovalori. Consideriamo trasformazioni per
Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2014-2015 Metodi per similitudine Matrici simili hanno gli stessi autovalori. Consideriamo trasformazioni per
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame
 Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Sistemi sovradeterminati. b vettore(termine noto) V n. y* proiezione ortogonale di b. Carla Guerrini 1
 V n. y* proiezione ortogonale di b. Carla Guerrini 1") Carla Guerrini 1 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m si vuole trovare una soluzione del sistema sovradeterminato Ax = b. Nel caso in cui la matric A abbia rango pieno, cioé
Carla Guerrini 1 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m si vuole trovare una soluzione del sistema sovradeterminato Ax = b. Nel caso in cui la matric A abbia rango pieno, cioé
1. Si scriva una function Matlab che implementa il seguente metodo di punto fisso
 Domanda 1 1. Si scriva una function Matlab che implementa il seguente metodo di punto fisso x n+1 = x n f(x n), n = 0, 1, 2,... K dove x 0 è il punto iniziale, f(x) = x 3 cos(x) e K è una costante assegnata.
Domanda 1 1. Si scriva una function Matlab che implementa il seguente metodo di punto fisso x n+1 = x n f(x n), n = 0, 1, 2,... K dove x 0 è il punto iniziale, f(x) = x 3 cos(x) e K è una costante assegnata.
Problema ai minimi quadrati nella risoluzione di sistemi lineari indeterminati
 UNIVERSITÀ DEGLI STUDI DI CAGLIARI Facoltà di Ingegneria e Architettura Corso di laurea triennale in Ingegneria Elettrica ed Elettronica Problema ai minimi quadrati nella risoluzione di sistemi lineari
UNIVERSITÀ DEGLI STUDI DI CAGLIARI Facoltà di Ingegneria e Architettura Corso di laurea triennale in Ingegneria Elettrica ed Elettronica Problema ai minimi quadrati nella risoluzione di sistemi lineari
Complementi di Matematica e Calcolo Numerico A.A
 Complementi di Matematica e Calcolo Numerico A.A. 207-208 Laboratorio 5 Metodi diretti per sistemi lineari Siano A R n n una matrice quadrata non singolare (det(a) 0) e b R n un vettore assegnati, allora
Complementi di Matematica e Calcolo Numerico A.A. 207-208 Laboratorio 5 Metodi diretti per sistemi lineari Siano A R n n una matrice quadrata non singolare (det(a) 0) e b R n un vettore assegnati, allora
Il problema lineare dei minimi quadrati
 Il problema lineare dei minimi quadrati APPLICAZIONE: Il polinomio di migliore approssimazione nel senso dei minimi quadrati Felice Iavernaro Dipartimento di Matematica Università di Bari 15 Gennaio 2009
Il problema lineare dei minimi quadrati APPLICAZIONE: Il polinomio di migliore approssimazione nel senso dei minimi quadrati Felice Iavernaro Dipartimento di Matematica Università di Bari 15 Gennaio 2009
UNIVERSITÀ DEGLI STUDI DI CAGLIARI FACOLTÀ DI INGEGNERIA
 UNIVERSITÀ DEGLI STUDI DI CAGLIARI FACOLTÀ DI INGEGNERIA Fattorizzazione QR e problemi ai minimi quadrati. Seminario: Numerical Linear Algebra (Professor Rodriguez) Giulia Marcello Francesca Marcello ANNO
UNIVERSITÀ DEGLI STUDI DI CAGLIARI FACOLTÀ DI INGEGNERIA Fattorizzazione QR e problemi ai minimi quadrati. Seminario: Numerical Linear Algebra (Professor Rodriguez) Giulia Marcello Francesca Marcello ANNO
Sistemi lineari. Lucia Gastaldi. DICATAM - Sez. di Matematica,
 Sistemi lineari Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Risoluzione di sistemi lineari Risoluzione di sistemi lineari in Matlab Metodi di risoluzione Fattorizzazione
Sistemi lineari Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Risoluzione di sistemi lineari Risoluzione di sistemi lineari in Matlab Metodi di risoluzione Fattorizzazione
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Complementi di Matematica e Calcolo Numerico A.A
 Complementi di Matematica e Calcolo Numerico A.A. 205-206 Laboratorio 9 Metodo di Eliminazione Gaussiana per sistemi lineari Siano A R n n una matrice quadrata non singolare (det(a) 0) e b R n un vettore
Complementi di Matematica e Calcolo Numerico A.A. 205-206 Laboratorio 9 Metodo di Eliminazione Gaussiana per sistemi lineari Siano A R n n una matrice quadrata non singolare (det(a) 0) e b R n un vettore
Sistemi lineari. Lucia Gastaldi. DICATAM - Sez. di Matematica,
 Sistemi lineari Lucia Gastaldi DICATAM - Sez. di Matematica, http://www.ing.unibs.it/gastaldi/ Indice 1 Risoluzione di sistemi lineari Risoluzione di sistemi lineari in Matlab Metodi di risoluzione Fattorizzazione
Sistemi lineari Lucia Gastaldi DICATAM - Sez. di Matematica, http://www.ing.unibs.it/gastaldi/ Indice 1 Risoluzione di sistemi lineari Risoluzione di sistemi lineari in Matlab Metodi di risoluzione Fattorizzazione
1. Calcolo dell indice di condizionamento di una matrice
 1 Esercizi sul condizionamento con matlab laboratorio di Calcolo Scientifico per Geofisici Prof. A. Murli a.a. 2006/07 1. Calcolo dell indice di condizionamento di una matrice Determinare una function
1 Esercizi sul condizionamento con matlab laboratorio di Calcolo Scientifico per Geofisici Prof. A. Murli a.a. 2006/07 1. Calcolo dell indice di condizionamento di una matrice Determinare una function
Trasformazioni elementari di Givens (rotazioni elementari)
") Trasformazioni elementari di Givens (rotazioni elementari) Si dice trasformazione elementare di Givens o matrice di rotazione elementare G ij di ordine n una matrice che coincide con l identità di ordine
Trasformazioni elementari di Givens (rotazioni elementari) Si dice trasformazione elementare di Givens o matrice di rotazione elementare G ij di ordine n una matrice che coincide con l identità di ordine
Capitolo 1. Esercizi a.a Esercizi. Esercizio 1.1 Dimostrare che il metodo iterativo
 Capitolo Esercizi a.a. 206-7 Esercizi Esercizio. Dimostrare che il metodo iterativo x k+ = Φ(x k ), k = 0,,..., se convergente a x, deve verificare la condizione di consistenza x = Φ(x ). Ovvero, la soluzione
Capitolo Esercizi a.a. 206-7 Esercizi Esercizio. Dimostrare che il metodo iterativo x k+ = Φ(x k ), k = 0,,..., se convergente a x, deve verificare la condizione di consistenza x = Φ(x ). Ovvero, la soluzione
SISTEMI LINEARI MATRICI E SISTEMI 1
 MATRICI E SISTEMI SISTEMI LINEARI Sistemi lineari e forma matriciale (definizioni e risoluzione). Teorema di Rouché-Capelli. Sistemi lineari parametrici. Esercizio Risolvere il sistema omogeneo la cui
MATRICI E SISTEMI SISTEMI LINEARI Sistemi lineari e forma matriciale (definizioni e risoluzione). Teorema di Rouché-Capelli. Sistemi lineari parametrici. Esercizio Risolvere il sistema omogeneo la cui
Problemi ai minimi quadrati
 Seminario di matematica applicata avanzata Problemi ai minimi quadrati Sanna Mirko Matricola: 44464 Ingegneria elettrica ed elettronica Indice Introduzione - Il problema dei minimi quadrati - I vari tipi
Seminario di matematica applicata avanzata Problemi ai minimi quadrati Sanna Mirko Matricola: 44464 Ingegneria elettrica ed elettronica Indice Introduzione - Il problema dei minimi quadrati - I vari tipi
Esercitazione di Calcolo Numerico 1 27 Maggio Calcolare la fattorizzazione P A = LU della matrice A =
 Esercitazione di Calcolo Numerico 1 27 Maggio 29 1. Calcolare la fattorizzazione P A = LU della matrice 1 2 3 A = 2 3 3, ed utilizzarla per risolvere il sistema lineare Ax = b, con b = (1, 2,, 16) T. 2.
Esercitazione di Calcolo Numerico 1 27 Maggio 29 1. Calcolare la fattorizzazione P A = LU della matrice 1 2 3 A = 2 3 3, ed utilizzarla per risolvere il sistema lineare Ax = b, con b = (1, 2,, 16) T. 2.
A =, c d. d = ad cb. c d A =
 Geometria e Algebra (II), 271112 1 Definizione D ora innanzi, al posto di dire matrice quadrata di tipo n n o matrice quadrata n n diremo matrice quadrata di ordine n o in breve matrice di ordine n Il
Geometria e Algebra (II), 271112 1 Definizione D ora innanzi, al posto di dire matrice quadrata di tipo n n o matrice quadrata n n diremo matrice quadrata di ordine n o in breve matrice di ordine n Il
Approssimazione di dati
 Approssimazione di dati Lucia Gastaldi DICATAM - Sez. di Matematica, http://dm.ing.unibs.it/gastaldi/ Indice 1 Approssimaz. di dati Approssimazione di dati 2 Minimi quadrati lineari Regressione lineare
Approssimazione di dati Lucia Gastaldi DICATAM - Sez. di Matematica, http://dm.ing.unibs.it/gastaldi/ Indice 1 Approssimaz. di dati Approssimazione di dati 2 Minimi quadrati lineari Regressione lineare
Approssimazione di dati
 Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 2 Regressione lineare : caso generale Legge di Ohm La legge di Ohm afferma che la differenza di potenziale V ai capi
Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 2 Regressione lineare : caso generale Legge di Ohm La legge di Ohm afferma che la differenza di potenziale V ai capi
Approssimazione ai minimi quadrati nel discreto
 Approssimazione ai minimi quadrati nel discreto 1 È assegnato un insieme di m punti (x i, y i ), i = 1,..., m, che descrivono un certo fenomeno. Vogliamo trovare un polinomio p n (x) = c 0 + c 1 x +...
Approssimazione ai minimi quadrati nel discreto 1 È assegnato un insieme di m punti (x i, y i ), i = 1,..., m, che descrivono un certo fenomeno. Vogliamo trovare un polinomio p n (x) = c 0 + c 1 x +...
Applicazioni lineari e diagonalizzazione. Esercizi svolti
 . Applicazioni lineari Esercizi svolti. Si consideri l applicazione f : K -> K definita da f(x,y) = x + y e si stabilisca se è lineare. Non è lineare. Possibile verifica: f(,) = 4; f(,4) = 6; quindi f(,4)
. Applicazioni lineari Esercizi svolti. Si consideri l applicazione f : K -> K definita da f(x,y) = x + y e si stabilisca se è lineare. Non è lineare. Possibile verifica: f(,) = 4; f(,4) = 6; quindi f(,4)
Approssimazione di dati
 Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 2 Regressione lineare : caso generale Legge di Ohm La legge di Ohm afferma che la differenza di potenziale V ai capi
Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 2 Regressione lineare : caso generale Legge di Ohm La legge di Ohm afferma che la differenza di potenziale V ai capi
Metodi diretti: eliminazione gaussiana
 Calcolo numerico 08/09 p. 1/1 SISTEMI LINEARI Metodi diretti: eliminazione gaussiana Calcolo numerico 08/09 p. 2/1 Sistemi lineari Ax = b, A R n n, b R n b INPUT x OUTPUT A relazione funzionale non ambigua
Calcolo numerico 08/09 p. 1/1 SISTEMI LINEARI Metodi diretti: eliminazione gaussiana Calcolo numerico 08/09 p. 2/1 Sistemi lineari Ax = b, A R n n, b R n b INPUT x OUTPUT A relazione funzionale non ambigua
Approssimazione di dati
 Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 2 Regressione lineare : caso generale Legge di Ohm La legge di Ohm afferma che la differenza di potenziale V ai capi
Lucia Gastaldi DICATAM - Sez. di Matematica, http://lucia-gastaldi.unibs.it Indice 1 2 Regressione lineare : caso generale Legge di Ohm La legge di Ohm afferma che la differenza di potenziale V ai capi
Complementi di Matematica e Calcolo Numerico C.L. Chimica Industriale A.A
 Complementi di Matematica e Calcolo Numerico C.L. Chimica Industriale A.A. 208-209 Laboratorio 4-4 aprile 209 Metodo delle sostituzioni in avanti per sistemi lineari con matrice triangolare inferiore Siano
Complementi di Matematica e Calcolo Numerico C.L. Chimica Industriale A.A. 208-209 Laboratorio 4-4 aprile 209 Metodo delle sostituzioni in avanti per sistemi lineari con matrice triangolare inferiore Siano
Note per il corso di Geometria Corso di laurea in Ing. Edile/Architettura. 4 Sistemi lineari. Metodo di eliminazione di Gauss Jordan
 Note per il corso di Geometria 2006-07 Corso di laurea in Ing. Edile/Architettura Sistemi lineari. Metodo di eliminazione di Gauss Jordan.1 Operazioni elementari Abbiamo visto che un sistema di m equazioni
Note per il corso di Geometria 2006-07 Corso di laurea in Ing. Edile/Architettura Sistemi lineari. Metodo di eliminazione di Gauss Jordan.1 Operazioni elementari Abbiamo visto che un sistema di m equazioni
2. Risolvere con il metodo di eliminazione di Gauss con pivoting parziale il seguente sistema lineare:
 Esercizi sui metodi diretti per la risoluzione di sistemi lineari 1. Data la matrice 1 0 2 1 3 1 5 2 1 determinare la sua fattorizzazione P LR. Risolvere il sistema Ax = b con b = (3, 5, 6) T mediante
Esercizi sui metodi diretti per la risoluzione di sistemi lineari 1. Data la matrice 1 0 2 1 3 1 5 2 1 determinare la sua fattorizzazione P LR. Risolvere il sistema Ax = b con b = (3, 5, 6) T mediante
10 Metodi diretti per la risoluzione di sistemi lineari: fattorizzazione QR
 10 Metodi diretti per la risoluzione di sistemi lineari: fattorizzazione QR 101 Metodo di ortonormalizzazione di Gram-Schmidt Per descrivere il metodo di ortonormalizzazione di Gram-Schmidt occorre la
10 Metodi diretti per la risoluzione di sistemi lineari: fattorizzazione QR 101 Metodo di ortonormalizzazione di Gram-Schmidt Per descrivere il metodo di ortonormalizzazione di Gram-Schmidt occorre la
Sistemi di equazioni lineari
 Sistemi di equazioni lineari I sistemi di equazioni si incontrano in natura in molti problemi di vita reale. Per esempio, prendiamo in considerazione una bevanda a base di uova, latte e succo d arancia.
Sistemi di equazioni lineari I sistemi di equazioni si incontrano in natura in molti problemi di vita reale. Per esempio, prendiamo in considerazione una bevanda a base di uova, latte e succo d arancia.
Altre trasformazioni elementari
 Altre trasformazioni elementari Si possono definire altri tipi di trasformazioni elementari Analogamente alle trasformazioni di Gauss, esse danno luogo a fattorizzazioni Trasformazione elementari di Givens
Altre trasformazioni elementari Si possono definire altri tipi di trasformazioni elementari Analogamente alle trasformazioni di Gauss, esse danno luogo a fattorizzazioni Trasformazione elementari di Givens
Applicazioni eliminazione di Gauss
 Applicazioni eliminazione di Gauss. Premessa Nel seguito supporremo sempre di applicare il metodo di eliminazione di Gauss allo scopo di trasformare la matrice del sistema Ax = b in una matrice triangolare
Applicazioni eliminazione di Gauss. Premessa Nel seguito supporremo sempre di applicare il metodo di eliminazione di Gauss allo scopo di trasformare la matrice del sistema Ax = b in una matrice triangolare
Implementazione degli algoritmi.
 Implementazione degli algoritmi. 4.1. Introduzione. In questo capitolo sarà discussa l implementazione software per l ambiente MATLAB 6.1 che è stata fatta degli algoritmi di identificazione presentati
Implementazione degli algoritmi. 4.1. Introduzione. In questo capitolo sarà discussa l implementazione software per l ambiente MATLAB 6.1 che è stata fatta degli algoritmi di identificazione presentati
VETTORI E MATRICI. Ing. Nicola Cappuccio 2014 U.F.5 ELEMENTI SCIENTIFICI ED ELETTRONICI APPLICATI AI SISTEMI DI TELECOMUNICAZIONI
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 I VETTRORI E MATRICI (RICHIAMI) Ad ogni matrice quadrata a coefficienti reali è possibile associare un numero reale, detto determinante, calcolato
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 I VETTRORI E MATRICI (RICHIAMI) Ad ogni matrice quadrata a coefficienti reali è possibile associare un numero reale, detto determinante, calcolato
ossia può anche essere localizzato univocamente sul piano complesso con la sua forma polare.
 ALGEBRA COMPLESSA Nel corso dei secoli gli insiemi dei numeri sono andati man mano allargandosi per rispondere all esigenza di dare soluzione a equazioni e problemi sempre nuovi I numeri complessi sono
ALGEBRA COMPLESSA Nel corso dei secoli gli insiemi dei numeri sono andati man mano allargandosi per rispondere all esigenza di dare soluzione a equazioni e problemi sempre nuovi I numeri complessi sono
Algebra Lineare Numerica A.A Lab.6
 Algebra Lineare Numerica A.A. 2005-2006 - Lab.6 Stabilità di algoritmi per la risoluzione di problemi ai minimi quadrati Si considerino la seguente matrice A e il seguente vettore b 1 1 2 A = 1 1.0001,
Algebra Lineare Numerica A.A. 2005-2006 - Lab.6 Stabilità di algoritmi per la risoluzione di problemi ai minimi quadrati Si considerino la seguente matrice A e il seguente vettore b 1 1 2 A = 1 1.0001,
Richiami di algebra delle matrici a valori reali
 Richiami di algebra delle matrici a valori reali Vettore v n = v 1 v 2. v n Vettore trasposto v n = (v 1, v 2,..., v n ) v n = (v 1, v 2,..., v n ) A. Pollice - Statistica Multivariata Vettore nullo o
Richiami di algebra delle matrici a valori reali Vettore v n = v 1 v 2. v n Vettore trasposto v n = (v 1, v 2,..., v n ) v n = (v 1, v 2,..., v n ) A. Pollice - Statistica Multivariata Vettore nullo o
INTERPOLAZIONI CON SPLINE
 INTERPOLAZIONI CON SPLINE Assegnati gli n +1valori che la funzione f assume nei nodi x i, si costruisce un interpolazione polinomiale a tratti. In ognuno degli intervalli [x i 1,x i ] il polinomio interpolatore
INTERPOLAZIONI CON SPLINE Assegnati gli n +1valori che la funzione f assume nei nodi x i, si costruisce un interpolazione polinomiale a tratti. In ognuno degli intervalli [x i 1,x i ] il polinomio interpolatore
ALGEBRA LINEARE PARTE III
 DIEM sez Matematica Finanziaria Università degli studi di Genova Dicembre 200 Indice PREMESSA 2 GENERALITA 2 RAPPRESENTAZIONE DI UN SISTEMA LINEARE IN FORMA MATRI- CIALE 2 3 SOLUZIONE DI SISTEMI LINEARI
DIEM sez Matematica Finanziaria Università degli studi di Genova Dicembre 200 Indice PREMESSA 2 GENERALITA 2 RAPPRESENTAZIONE DI UN SISTEMA LINEARE IN FORMA MATRI- CIALE 2 3 SOLUZIONE DI SISTEMI LINEARI
ESAME DI MATEMATICA I parte Vicenza, 05/06/2017. x log 2 x?
 A. Peretti Svolgimento dei temi d esame di Matematica A.A. 6/7 ESAME DI MATEMATICA I parte Vicenza, 5/6/7 log? Domanda. Per quali valori di è definita l espressione L espressione è definita se l argomento
A. Peretti Svolgimento dei temi d esame di Matematica A.A. 6/7 ESAME DI MATEMATICA I parte Vicenza, 5/6/7 log? Domanda. Per quali valori di è definita l espressione L espressione è definita se l argomento
SISTEMI LINEARI. Metodi diretti. Calcolo numerico 07/08 p. 1/1
 SISTEMI LINEARI Metodi diretti Calcolo numerico 07/08 p. 1/1 Sistemi lineari Ax = b, A R n n, b R n b INPUT x OUTPUT A relazione funzionale non ambigua det(a) 0 ( un unica soluzione) (Esercizio 1) Se det
SISTEMI LINEARI Metodi diretti Calcolo numerico 07/08 p. 1/1 Sistemi lineari Ax = b, A R n n, b R n b INPUT x OUTPUT A relazione funzionale non ambigua det(a) 0 ( un unica soluzione) (Esercizio 1) Se det
Elementi di Algebra Lineare
 Elementi di Algebra Lineare Corso di Calcolo Numerico, a.a. 2009/2010 Francesca Mazzia Dipartimento di Matematica Università di Bari 13 Marzo 2006 Francesca Mazzia (Univ. Bari) Elementi di Algebra Lineare
Elementi di Algebra Lineare Corso di Calcolo Numerico, a.a. 2009/2010 Francesca Mazzia Dipartimento di Matematica Università di Bari 13 Marzo 2006 Francesca Mazzia (Univ. Bari) Elementi di Algebra Lineare
SISTEMI LINEARI. Ax = b
 SISTEMI LINEARI Un sistema lineare di n equazioni algebriche in n incognite è esprimibile come: a 11 x 1 + a 1 x + a 13 x 3 +... + a 1n x n = b 1 a 1 x 1 + a x + a 3 x 3 +... + a n x n = b a n1 x 1 + a
SISTEMI LINEARI Un sistema lineare di n equazioni algebriche in n incognite è esprimibile come: a 11 x 1 + a 1 x + a 13 x 3 +... + a 1n x n = b 1 a 1 x 1 + a x + a 3 x 3 +... + a n x n = b a n1 x 1 + a
Laboratorio di Calcolo Numerico
 Laboratorio di Calcolo Numerico M.R. Russo Università degli Studi di Padova Dipartimento di Matematica Pura ed Applicata A.A. 2009/2010 INDICE Sistemi lineari Casi particolari Eliminazione di Gauss Fattorizzazione
Laboratorio di Calcolo Numerico M.R. Russo Università degli Studi di Padova Dipartimento di Matematica Pura ed Applicata A.A. 2009/2010 INDICE Sistemi lineari Casi particolari Eliminazione di Gauss Fattorizzazione
Esercitazione 4: Vettori e Matrici
 Esercitazione 4: Vettori e Matrici Richiami di teoria: Norme di vettore Principali norme di vettore:. x = n i= x i 2. x 2 = n i= x i 2 3. x = max i n x i Ad esempio dato il vettore x = (, 2, 3, 4) abbiamo.
Esercitazione 4: Vettori e Matrici Richiami di teoria: Norme di vettore Principali norme di vettore:. x = n i= x i 2. x 2 = n i= x i 2 3. x = max i n x i Ad esempio dato il vettore x = (, 2, 3, 4) abbiamo.
La forma normale di Schur
 La forma normale di Schur Dario A Bini, Università di Pisa 30 ottobre 2013 Sommario Questo modulo didattico contiene risultati relativi alla forma normale di Schur, alle sue proprietà e alle sue applicazioni
La forma normale di Schur Dario A Bini, Università di Pisa 30 ottobre 2013 Sommario Questo modulo didattico contiene risultati relativi alla forma normale di Schur, alle sue proprietà e alle sue applicazioni
3 Soluzione di sistemi lineari
 3 Soluzione di sistemi lineari Prima di addentrarci nello studio dei metodi numerici, è doveroso introdurre le matrici e alcune strutture particolari di matrici nonchè alcuni concetti fondamentali quali
3 Soluzione di sistemi lineari Prima di addentrarci nello studio dei metodi numerici, è doveroso introdurre le matrici e alcune strutture particolari di matrici nonchè alcuni concetti fondamentali quali
Complementi di Matematica e Calcolo Numerico A.A
 Complementi di Matematica e Calcolo Numerico A.A. 20-206 Laboratorio 8. (punteggio 3/3/) Si consideri la funzione f(x) = sin(e x/2 ).. Si approssimi la radice α di f nell intervallo [0, 3.] utilizzando
Complementi di Matematica e Calcolo Numerico A.A. 20-206 Laboratorio 8. (punteggio 3/3/) Si consideri la funzione f(x) = sin(e x/2 ).. Si approssimi la radice α di f nell intervallo [0, 3.] utilizzando
SOTTOSPAZI E OPERAZIONI IN SPAZI DIVERSI DA R n
 SPAZI E SOTTOSPAZI 1 SOTTOSPAZI E OPERAZIONI IN SPAZI DIVERSI DA R n Spazi di matrici. Spazi di polinomi. Generatori, dipendenza e indipendenza lineare, basi e dimensione. Intersezione e somma di sottospazi,
SPAZI E SOTTOSPAZI 1 SOTTOSPAZI E OPERAZIONI IN SPAZI DIVERSI DA R n Spazi di matrici. Spazi di polinomi. Generatori, dipendenza e indipendenza lineare, basi e dimensione. Intersezione e somma di sottospazi,
Sistemi II. Sistemi II. Elisabetta Colombo
 Corso di Approfondimenti di Matematica per Biotecnologie, Anno Accademico 2011-2012, http://users.mat.unimi.it/users/colombo/programmabio.html 1 2 3 con R.C.+ o 1.10 Rango massimo e determinante con R.C.+
Corso di Approfondimenti di Matematica per Biotecnologie, Anno Accademico 2011-2012, http://users.mat.unimi.it/users/colombo/programmabio.html 1 2 3 con R.C.+ o 1.10 Rango massimo e determinante con R.C.+
Sistemi lineari. Lucia Gastaldi. 11 novembre Dipartimento di Matematica,
 Sistemi lineari Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 11 novembre 2007 Outline 1 Come risolvere un sistema lineare con MATLAB Il comando per risolvere i sistemi lineari
Sistemi lineari Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 11 novembre 2007 Outline 1 Come risolvere un sistema lineare con MATLAB Il comando per risolvere i sistemi lineari
Sistemi lineari. Sia A R m n, x R n Ax = b è un vettore di m componenti. a m,1 x 1 + a m,2 x a m,n x n = b m
 1 Sistemi lineari. Sia A R m n, x R n Ax = b è un vettore di m componenti. Numero di operazioni per calcolare b: m n moltiplicazioni m (n 1) addizioni. a 1,1 x 1 + a 1,2 x 2 +... + a 1,n x n = b 1 a 2,1
1 Sistemi lineari. Sia A R m n, x R n Ax = b è un vettore di m componenti. Numero di operazioni per calcolare b: m n moltiplicazioni m (n 1) addizioni. a 1,1 x 1 + a 1,2 x 2 +... + a 1,n x n = b 1 a 2,1
Trasformazione elementari di Givens
 Trasformazione elementari di Givens dove Osservazione Esprime una rotazione di ampiezza ϕ Esempio (n=2) Osservazione Rotazione nel senso positivo degli archi In generale Il prodotto matrice vettore equivale
Trasformazione elementari di Givens dove Osservazione Esprime una rotazione di ampiezza ϕ Esempio (n=2) Osservazione Rotazione nel senso positivo degli archi In generale Il prodotto matrice vettore equivale
Sistemi di equazioni lineari
 Sistemi di equazioni lineari A. Bertapelle 25 ottobre 212 Cos è un sistema lineare? Definizione Un sistema di m equazioni lineari (o brevemente sistema lineare) nelle n incognite x 1,..., x n, a coefficienti
Sistemi di equazioni lineari A. Bertapelle 25 ottobre 212 Cos è un sistema lineare? Definizione Un sistema di m equazioni lineari (o brevemente sistema lineare) nelle n incognite x 1,..., x n, a coefficienti
Analisi Numerica: Introduzione
 Analisi Numerica: Introduzione S. Maset Dipartimento di Matematica e Geoscienze, Università di Trieste Analisi numerica e calcolo numerico Analisi numerica e calcolo numerico La matematica del continuo
Analisi Numerica: Introduzione S. Maset Dipartimento di Matematica e Geoscienze, Università di Trieste Analisi numerica e calcolo numerico Analisi numerica e calcolo numerico La matematica del continuo
Problema. Sistemi lineari. Problema. Problema. Quali sono i potenziali in ogni nodo? Leggi di Kirkoff e di Ohm:
 Problema 4 Ω 3 3 Ω 2 2 Ω 40 V Sistemi lineari 2 Ω Ω 2 Ω Ω 5 6 7 8 Ω 4 Ω Ω 0 V Quali sono i potenziali in ogni nodo? 2 4 Ω Problema 3 3 Ω 2 2 Ω 40 V 4 Ω Problema 3 3 Ω 2 2 Ω 40 V 2 Ω Ω 2 Ω Ω 2 Ω Ω 2 Ω Ω
Problema 4 Ω 3 3 Ω 2 2 Ω 40 V Sistemi lineari 2 Ω Ω 2 Ω Ω 5 6 7 8 Ω 4 Ω Ω 0 V Quali sono i potenziali in ogni nodo? 2 4 Ω Problema 3 3 Ω 2 2 Ω 40 V 4 Ω Problema 3 3 Ω 2 2 Ω 40 V 2 Ω Ω 2 Ω Ω 2 Ω Ω 2 Ω Ω
Richiami di Algebra Lineare
 Richiami di Algebra Lineare Eduardo Rossi Università degli Studi di Pavia Corso di Econometria Marzo 2012 Rossi Algebra Lineare 2012 1 / 59 Vettori Prodotto interno a : (n 1) b : (n 1) a b = a 1 b 1 +
Richiami di Algebra Lineare Eduardo Rossi Università degli Studi di Pavia Corso di Econometria Marzo 2012 Rossi Algebra Lineare 2012 1 / 59 Vettori Prodotto interno a : (n 1) b : (n 1) a b = a 1 b 1 +
Complementi di Matematica e Calcolo Numerico A.A
 Complementi di Matematica e Calcolo Numerico A.A. 206-207 Laboratorio Autovalori, raggio spettrale e norme di matrici Sia A una matrice quadrata di ordine n a valori reali o complessi, il numero λ C si
Complementi di Matematica e Calcolo Numerico A.A. 206-207 Laboratorio Autovalori, raggio spettrale e norme di matrici Sia A una matrice quadrata di ordine n a valori reali o complessi, il numero λ C si
Quali condizionisi si possono richiedere sulla funzione interpolante?
 INTERPOLAZIONE Problema generale di INTERPOLAZIONE Dati n punti distinti ( i, i ) i=,..,n si vuole costruire una funzione f() tale che nei nodi ( i ) i=,..n soddisfi a certe condizioni, dette Condizioni
INTERPOLAZIONE Problema generale di INTERPOLAZIONE Dati n punti distinti ( i, i ) i=,..,n si vuole costruire una funzione f() tale che nei nodi ( i ) i=,..n soddisfi a certe condizioni, dette Condizioni
Note per le esercitazioni di Geometria 1 a.a. 2007/08 A. Lotta. Metodi per il calcolo del rango di una matrice
 Note per le esercitazioni di Geometria 1 a.a. 2007/08 A. Lotta Versione del 21/12/07 Metodi per il calcolo del rango di una matrice Sia A M m,n (K). Denotiamo con A (i) la riga i-ma di A, i {1,..., m}.
Note per le esercitazioni di Geometria 1 a.a. 2007/08 A. Lotta Versione del 21/12/07 Metodi per il calcolo del rango di una matrice Sia A M m,n (K). Denotiamo con A (i) la riga i-ma di A, i {1,..., m}.
Esercizi svolti. Geometria analitica: rette e piani
 Esercizi svolti. Sistemi di riferimento e vettori. Dati i vettori v = i + j k, u =i + j + k determinare:. il vettore v + u ;. gli angoli formati da v e u;. i vettore paralleli alle bisettrici di tali angoli;
Esercizi svolti. Sistemi di riferimento e vettori. Dati i vettori v = i + j k, u =i + j + k determinare:. il vettore v + u ;. gli angoli formati da v e u;. i vettore paralleli alle bisettrici di tali angoli;
MATRICI E VETTORI APPROFONDIMENTO PER IL CORSO DI LABORATORIO DI INFORMATICA SARA POLTRONIERI
 MATRICI E VETTORI APPROFONDIMENTO PER IL CORSO DI LABORATORIO DI INFORMATICA SARA POLTRONIERI LE MATRICI DEFINIZIONE: Una matrice è un insieme di numeri disposti su righe e colonne. 1 3 7 M = 2 5 1 M è
MATRICI E VETTORI APPROFONDIMENTO PER IL CORSO DI LABORATORIO DI INFORMATICA SARA POLTRONIERI LE MATRICI DEFINIZIONE: Una matrice è un insieme di numeri disposti su righe e colonne. 1 3 7 M = 2 5 1 M è
Quale delle seguenti rappresentazioni del numero reale è in virgola mobile normalizzata?
 Quale delle seguenti istruzioni MATLAB esegue il calcolo del raggio spettrale di una matrice quadrata A? a. max(eig(abs(a))) b. max(abs(eig(a))) c. abs(max(eig(a))) d. max(abs(eig(a *A))) Il raggio spettrale
Quale delle seguenti istruzioni MATLAB esegue il calcolo del raggio spettrale di una matrice quadrata A? a. max(eig(abs(a))) b. max(abs(eig(a))) c. abs(max(eig(a))) d. max(abs(eig(a *A))) Il raggio spettrale
Risoluzione di sistemi lineari sparsi e di grandi dimensioni
 Risoluzione di sistemi lineari sparsi e di grandi dimensioni Un sistema lineare Ax = b con A R n n, b R n, è sparso quando il numero di elementi della matrice A diversi da zero è αn, con n α. Una caratteristica
Risoluzione di sistemi lineari sparsi e di grandi dimensioni Un sistema lineare Ax = b con A R n n, b R n, è sparso quando il numero di elementi della matrice A diversi da zero è αn, con n α. Una caratteristica
+ Analisi Numerica (1 modulo) Docente: M.Gaviano; domande di ripasso a.a
 Docente: M.Gaviano; domande di ripasso a.a") + Analisi Numerica ( modulo) Docente: M.Gaviano; domande di ripasso a.a. - Idee di base e richiami. Quale è lo scopo dell Analisi numerica. Attraverso quali fasi si passa nel risolvere un problema reale..
+ Analisi Numerica ( modulo) Docente: M.Gaviano; domande di ripasso a.a. - Idee di base e richiami. Quale è lo scopo dell Analisi numerica. Attraverso quali fasi si passa nel risolvere un problema reale..
Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari
 Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari 4 maggio Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ) Esercizio Siano 3 6 8 6 4 3 3 ) determinare
Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari 4 maggio Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ) Esercizio Siano 3 6 8 6 4 3 3 ) determinare
3. Elementi di Algebra Lineare.
 CALCOLO NUMERICO Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari 3. Elementi di Algebra Lineare. 1 Sistemi lineari Sia A IR m n, x IR n di n Ax = b è un vettore di m componenti.
CALCOLO NUMERICO Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari 3. Elementi di Algebra Lineare. 1 Sistemi lineari Sia A IR m n, x IR n di n Ax = b è un vettore di m componenti.
Nozioni e notazioni: concetti primitivi di insieme, elemento ed appartenenza.
 Geometria I lezione del 30 settembre 2013 Presentazione del corso. Nozioni e notazioni: concetti primitivi di insieme, elemento ed appartenenza. Insiemi numerici: i numeri naturali, gli interi, i numeri
Geometria I lezione del 30 settembre 2013 Presentazione del corso. Nozioni e notazioni: concetti primitivi di insieme, elemento ed appartenenza. Insiemi numerici: i numeri naturali, gli interi, i numeri
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Argomento 13 Sistemi lineari
 Sistemi lineari: definizioni Argomento Sistemi lineari Un equazione nelle n incognite x,, x n della forma c x + + c n x n = b ove c,, c n sono numeri reali (detti coefficienti) e b è un numero reale (detto
Sistemi lineari: definizioni Argomento Sistemi lineari Un equazione nelle n incognite x,, x n della forma c x + + c n x n = b ove c,, c n sono numeri reali (detti coefficienti) e b è un numero reale (detto
APPLICAZIONI. Im f = {b B a A tale che f (a) = b}.
 = b}.") APPLICAZIONI Diremo applicazione (o funzione) da un insieme A ad un insieme B una legge f che associa ad ogni elemento a A uno ed un solo elemento b B. Scriviamo f : A B e il corrispondente o immagine
APPLICAZIONI Diremo applicazione (o funzione) da un insieme A ad un insieme B una legge f che associa ad ogni elemento a A uno ed un solo elemento b B. Scriviamo f : A B e il corrispondente o immagine
Sistemi lineari. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Derivate di ordine superiore
 Derivate di ordine superiore Derivate di ordine superiore Il processo che porta alla definizione di derivabilta e di derivata di una funzione in un punto si puo iterare per dare per ogni intero positivo
Derivate di ordine superiore Derivate di ordine superiore Il processo che porta alla definizione di derivabilta e di derivata di una funzione in un punto si puo iterare per dare per ogni intero positivo
Compito numero 2 - Compito intero
 Esercitazione 6 - Correzione esame dell 8//3 Lucia Pilleri 9//3 Compito numero - Compito intero Esercizio del parziale - del compito intero Risolvere, mediante la fattorizzazione P A = LU, il sistema lineare
Esercitazione 6 - Correzione esame dell 8//3 Lucia Pilleri 9//3 Compito numero - Compito intero Esercizio del parziale - del compito intero Risolvere, mediante la fattorizzazione P A = LU, il sistema lineare
Appunti di Geometria - 2
 Appunti di Geometria - Samuele Mongodi - s.mongodi@sns.it Cambi di base e applicazioni lineari Richiami Sia V uno spazio vettoriale di dimensione n sul campo K, con base assegnata e,..., e n } (ad esempio
Appunti di Geometria - Samuele Mongodi - s.mongodi@sns.it Cambi di base e applicazioni lineari Richiami Sia V uno spazio vettoriale di dimensione n sul campo K, con base assegnata e,..., e n } (ad esempio
La lunghezza dei vettori e legata alle operazioni sui vettori nel modo seguente: Consideriamo due vettori v, w e il vettore v + w loro somma.
 Matematica II, 20.2.. Lunghezza di un vettore nel piano Consideriamo il piano vettoriale geometrico P O. Scelto un segmento come unita, possiamo parlare di lunghezza di un vettore v P O rispetto a tale
Matematica II, 20.2.. Lunghezza di un vettore nel piano Consideriamo il piano vettoriale geometrico P O. Scelto un segmento come unita, possiamo parlare di lunghezza di un vettore v P O rispetto a tale
APPUNTI DI ALGEBRA LINEARE
 APPUNTI DI ALGEBRA LINEARE. Definizione Si dice spazio vettoriale (sul campo dei numeri reali R) un insieme V per il quale siano definite l operazione interna di somma (che ad ogni coppia di vettori e
APPUNTI DI ALGEBRA LINEARE. Definizione Si dice spazio vettoriale (sul campo dei numeri reali R) un insieme V per il quale siano definite l operazione interna di somma (che ad ogni coppia di vettori e
Diagonalizzazione di matrici: autovalori, autovettori e costruzione della matrice diagonalizzante 1 / 13
 Diagonalizzazione di matrici: autovalori, autovettori e costruzione della matrice diagonalizzante 1 / 13 Matrici diagonali 2 / 13 Ricordiamo che una matrice quadrata si dice matrice diagonale se a ij =
Diagonalizzazione di matrici: autovalori, autovettori e costruzione della matrice diagonalizzante 1 / 13 Matrici diagonali 2 / 13 Ricordiamo che una matrice quadrata si dice matrice diagonale se a ij =
Fattorizzazione QR e matrici di Householder
 Fattorizzazione QR e matrici di Householder ottobre 009 In questa nota considereremo un tipo di fattorizzazione che esiste sempre nel caso di matrici quadrate non singolari ad entrate reali. Definizione
Fattorizzazione QR e matrici di Householder ottobre 009 In questa nota considereremo un tipo di fattorizzazione che esiste sempre nel caso di matrici quadrate non singolari ad entrate reali. Definizione
SISTEMI LINEARI. x 2y 2z = 0. Svolgimento. Procediamo con operazioni elementari di riga sulla matrice del primo sistema: 1 1 1 3 1 2 R 2 R 2 3R 0 4 5.
 SISTEMI LINEARI Esercizi Esercizio. Risolvere, se possibile, i seguenti sistemi: x y z = 0 x + y + z = 3x + y + z = 0 x y = 4x + z = 0, x y z = 0. Svolgimento. Procediamo con operazioni elementari di riga
SISTEMI LINEARI Esercizi Esercizio. Risolvere, se possibile, i seguenti sistemi: x y z = 0 x + y + z = 3x + y + z = 0 x y = 4x + z = 0, x y z = 0. Svolgimento. Procediamo con operazioni elementari di riga
PreCorso di Matematica - PCM Corso M-Z
 PreCorso di Matematica - PCM Corso M-Z DOCENTE: M. Auteri Outline Docente: Auteri PreCorso di Matematica 2016 2 Definizione di matrice Una matrice (di numeri reali) è una tabella di m x n numeri disposti
PreCorso di Matematica - PCM Corso M-Z DOCENTE: M. Auteri Outline Docente: Auteri PreCorso di Matematica 2016 2 Definizione di matrice Una matrice (di numeri reali) è una tabella di m x n numeri disposti
Complementi di Matematica e Calcolo Numerico A.A
 Complementi di Matematica e Calcolo Numerico A.A. 0-0 Laboratorio 9 Autovalori, raggio spettrale e norme di matrici Sia A una matrice quadrata di ordine n a valori reali o complessi, il numero λ C si dice
Complementi di Matematica e Calcolo Numerico A.A. 0-0 Laboratorio 9 Autovalori, raggio spettrale e norme di matrici Sia A una matrice quadrata di ordine n a valori reali o complessi, il numero λ C si dice
Note sull algoritmo di Gauss
 Note sull algoritmo di Gauss 29 settembre 2009 Generalità Un sistema lineare di m equazioni in n incognite x,..., x n è un espressione del tipo: a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n
Note sull algoritmo di Gauss 29 settembre 2009 Generalità Un sistema lineare di m equazioni in n incognite x,..., x n è un espressione del tipo: a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n
Approssimazione numerica
 Approssimazione numerica Laboratorio di programmazione e calcolo (Chimica e Tecnologie chimiche) Pierluigi Amodio Dipartimento di Matematica Università di Bari Approssimazione numerica p.1/10 Problema
Approssimazione numerica Laboratorio di programmazione e calcolo (Chimica e Tecnologie chimiche) Pierluigi Amodio Dipartimento di Matematica Università di Bari Approssimazione numerica p.1/10 Problema
1. Martedì 1/10/2013, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2013/2014 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 18 dicembre 2013 1. Martedì 1/10/2013, 12 14. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2013/2014 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 18 dicembre 2013 1. Martedì 1/10/2013, 12 14. ore:
Vettori e matrici. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Vettori e matrici Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utentiunifeit/lorenzopareschi/ lorenzopareschi@unifeit Lorenzo Pareschi Univ Ferrara
Vettori e matrici Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utentiunifeit/lorenzopareschi/ lorenzopareschi@unifeit Lorenzo Pareschi Univ Ferrara
Corso di Analisi Numerica
 con pivoting Corso di Laurea in Ingegneria Informatica Corso di Analisi Numerica 6 - METODI DIRETTI PER I SISTEMI LINEARI Lucio Demeio Dipartimento di Scienze Matematiche con pivoting 1 2 3 con pivoting
con pivoting Corso di Laurea in Ingegneria Informatica Corso di Analisi Numerica 6 - METODI DIRETTI PER I SISTEMI LINEARI Lucio Demeio Dipartimento di Scienze Matematiche con pivoting 1 2 3 con pivoting
3x 2 = 6. 3x 2 x 3 = 6
 Facoltà di Scienze Statistiche, Algebra Lineare 1 A, GParmeggiani LEZIONE 7 Sistemi lineari Scrittura matriciale di un sistema lineare Def 1 Un sistema di m equazioni ed n incognite x 1, x 2, x n, si dice
Facoltà di Scienze Statistiche, Algebra Lineare 1 A, GParmeggiani LEZIONE 7 Sistemi lineari Scrittura matriciale di un sistema lineare Def 1 Un sistema di m equazioni ed n incognite x 1, x 2, x n, si dice
Richiami di Algebra Lineare
 Università di Pavia Richiami di Algebra Lineare Eduardo Rossi Vettori a : (n 1) b : (n 1) Prodotto interno a b = a 1 b 1 + a 2 b 2 +... + a n b n Modulo (lunghezza): a = a 2 1 +... + a2 n Vettori ortogonali:
Università di Pavia Richiami di Algebra Lineare Eduardo Rossi Vettori a : (n 1) b : (n 1) Prodotto interno a b = a 1 b 1 + a 2 b 2 +... + a n b n Modulo (lunghezza): a = a 2 1 +... + a2 n Vettori ortogonali:
Sequenze (Sistemi) di Variabili Aleatorie Se consideriamo un numero di variabili aleatorie, generalmente dipendenti si parla equivalentemente di:
 di Variabili Aleatorie Se consideriamo un numero di variabili aleatorie, generalmente dipendenti si parla equivalentemente di:") Teoria dei Fenomeni Aleatori AA 01/13 Sequenze (Sistemi) di Variabili Aleatorie Se consideriamo un numero di variabili aleatorie, generalmente dipendenti si parla equivalentemente di: N-pla o Sequenza
Teoria dei Fenomeni Aleatori AA 01/13 Sequenze (Sistemi) di Variabili Aleatorie Se consideriamo un numero di variabili aleatorie, generalmente dipendenti si parla equivalentemente di: N-pla o Sequenza
Interpolazione. Corso di Calcolo Numerico, a.a. 2008/2009. Francesca Mazzia. Dipartimento di Matematica Università di Bari.
 Interpolazione Corso di Calcolo Numerico, a.a. 2008/2009 Francesca Mazzia Dipartimento di Matematica Università di Bari 17 Aprile 2009 Francesca Mazzia (Univ. Bari) Interpolazione 17/04/2006 1 / 37 Interpolazione
Interpolazione Corso di Calcolo Numerico, a.a. 2008/2009 Francesca Mazzia Dipartimento di Matematica Università di Bari 17 Aprile 2009 Francesca Mazzia (Univ. Bari) Interpolazione 17/04/2006 1 / 37 Interpolazione