PROBLEMI NON-LINEARI NEL CALCOLO STRUTTURALE
|
|
|
- Federico Massaro
- 7 anni fa
- Visualizzazioni
Transcript
1 PROBLEMI NON-LINEARI NEL CALCOLO STRUTTURALE 1/ Non-linearità geometrica: spostamenti e deformazioni finiti / Non-linearità materiale: legge costitutiva non-lineare, plasticità, meccanica del danno, ipoelasticità, RIF: M.Crisfield, Non-linear Finite Element Analysis of Solids and Structures, John Wiley & Sons, 1991 Cap 1 e Cap. 9 1

2 Soluzione di problemi NON-LINEARi 1 attivazione di una procedura iterativoincrementale basata sul Metodo di Newton-Raphson scelta della procedure di controllo dell evoluzione della curva strutturale.1 controllo di carico. controllo di spostamento. controllo misto carico/spostamento

3 SOLUZIONE DI UN EQUAZIONE NON-LINEARE Data la funzione a(b Essa puo essere espressa come: h(a(-b Risolvere a(b ~ risolvere h(0 In campo nonlineare la risoluzione di h(0 si affronta con una tecnica iterativa 3

4 SOLUZIONE DI UN EQUAZIONE NON-LINEARE 1. Si parte dal valore iniziale 0. Si genera una sequenza di valori iterativi n-1, n, n+1 convergenti alla soluzione * 3. Si itera secondo una procedura iterativa del tipo : n+1 F( n 4

5 METODO DI NEWTON-RAPHSON 5
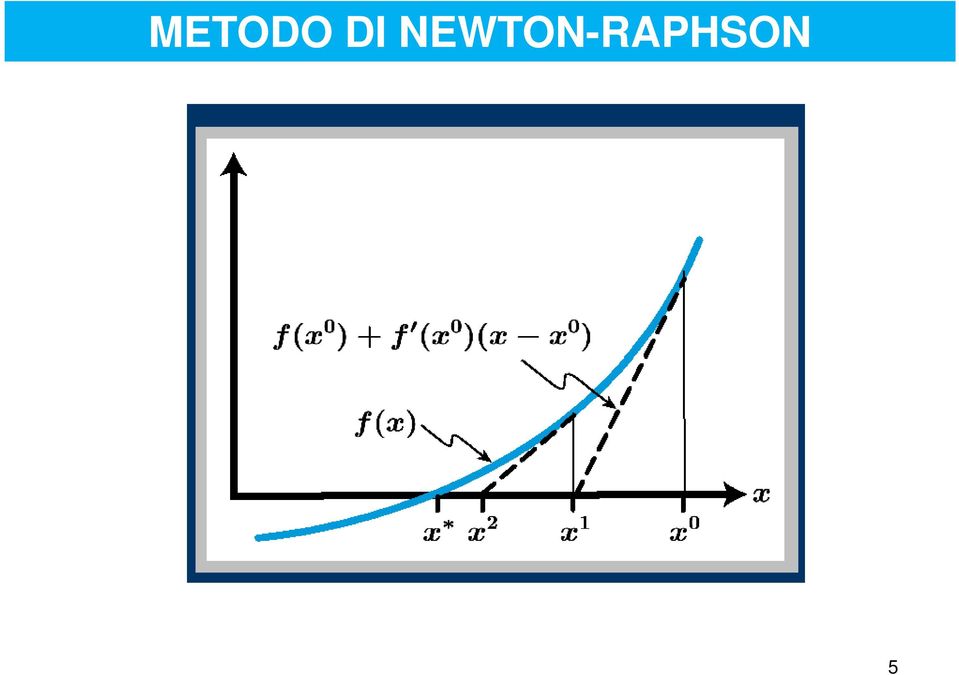
6 METODO DI NEWTON-RAPHSON Si sostituisce f( con la sua versione linearizzata iterativa funzione f d df d df f f Taylor Series d df f f 1 ( ( ( ( ( ( ( ( ( ( * * * Nota: ad ogni step occorre valutare f and f 6

7 Processo iterativo: ripeti da 0 a. METODO DI NEWTON-RAPHSON ( 1 df + 1 Fino a convergenza d DEF: una sequenza iterativa { ( } converge con l ordine q ad un valore * se esiste un vettore norma tale che per ogni N: + 1 * f ( * q 7

8 METODO DI NEWTON-RAPHSON Sappiamo che, se * e la soluzione di f(0, lo sviluppo in serie nell intorno di diventa df ( d d f ( ~ d * * * 0 f ( f ( + ( + ( Sappiamo inoltre che in base al Metodo di Newton Raphson 0 f ( + df ( d ( + 1 8

9 Sottraendo Moltiplicando per l inverso del gradiente 1 ( d f( d ( d df( * * ( ( f( d df ( * * + METODO DI NEWTON-RAPHSON Convergenza quadratica ( ( * * 1 1 K allora K d f d d df Sia + 1 ( ( d f( d d df ( * * + 9

10 METODO DI NEWTON-RAPHSON Vantaggi: -Convergenza quadratica quando si hanno radici con molteplicita semplice ed il gradiente esiste e si parte da una soluzione di tentativo sufficientemente vicina alla soluzione Svantaggi: -Occorre calcolare il gradiente, ma non sempre esso esiste -Occorre partire da una soluzione di tentativo sufficientemente vicina alla soluzione 10

11 Esempio di non-linearità geometrica ad 1 grado di libertà l Equilibrio verticale W Nsin θ N w + z l N w + l z 11

12 Deformazione nell asta Esempio di non-linearità geometrica ad 1 grado di libertà w 1 w z l (z l w z ( Deformazione nell asta supponendo piccolo θ ottenuta applicando il Teorema di Pitagora Sforzo nell asta 1 l w 1 l w l z l (z l (z l w (z ε + ε l w 1 l w l z EA EA N l z w l w 1 l w l z l z w N W Componente verticale

13 Esempio di non-linearità geometrica ad 1 grado di libertà W EA 3 (z w + zw + 3 l 1 w 3 W EA l z 3 w z 13

14 Esempio di non- linearità geometrica ad 1 grado di libertà con molla W EA (z w + zw + w + K 3 l S w W l EA z 3 1.3EAz K S 3 l EAz K S 3 l w z 14

15 Risoluzione del problema di non- linearità geometrica ad 1 grado di libertà mediante il METODO DI NEWTON- RAPHSON Introduciamo la differenza (detta residuo tra la forza interna, calcolata usando il legame costitutivo N-w, e la forza esterna reale applicata EA g (z w + zw + w W 0 3 l forza interna forza esterna Il nostro obiettivo è soddisfare esattamente l equazione g0, che, tuttavia, è non lineare in w Se g 0 l equazione di equilibrio non risulta soddisfatta Si supponga ora di adottare una procedura approssimata iterativa alla N-R per la soluzione dell equazione g0 15

16 Risoluzione del problema di non- linearità geometrica ad 1 grado di libertà mediante il METODO DI NEWTON-RAPHSON Approssimiamo il residuo valutato nella posizione n (new come polinomio di Taylor nell intorno della posizione precedente o (old troncato al I ordine 0 g n g 0 + dg0 dw δw + 1 d g dw 0 ( δw trascurabile Tangente Calcolata nella posizione old o 16

17 Risoluzione del problema di non- linearità geometrica ad 1 grado di libertà mediante il METODO DI NEWTON-RAPHSON Passo 3/ Si pone il residuo valutato nella posizione n uguale a 0 g n 0 Passo 4/ Si risolve l equazione ottenuta nell incremento δw 1 δw dg dw 0 0 g 0 ( w 0 Passo 5/ si ottiene una nuova stima per lo spostamento w w w + δw

18 Risoluzione del problema di non-linearità geometrica ad 1 grado di libertà mediante il METODO DI NEWTON-RAPHSON Si riparte quindi dall inizio con una nuova valutazione: δw dg dw 1 1 w 1 g ( 1 1 Fino a convergenza ovvero fino a quando g tol Si osservi che nel nostro caso g N(z + l w W Pertanto dg dw (z + w l dn dw + N l K t RIGIDEZZA TANGENTE 18

19 METODO DI NEWTON-RAPHSON 19

20 METODO DI NEWTON-RAPHSON:problemi connessi al calcolo della rigidezza tangente K t In generale K t può essere >0, 0, <0 oppure può non esistere Si preferiscono quindi metodi basati non sulla rigidezza tangente ma su approssimazioni della derivata dg/dw 0

21 METODO DI NEWTON-RAPHSON modificato secondo la rigidezza di inizio passo 1
22 METODO DI NEWTON-RAPHSON modificato secondo la rigidezza elastica iniziale
23 NB: errore numerico tra il percorso calcolato e quello reale 3
24 Tipologie di controllo della risposta strutturale carico-spostamento a Controllo di carico : Si procede incrementando il carico Finora abbiamo adottato questa procedura di incremento di carico b Controllo di spostamento : Si procede incrementando lo spostamento quando non e possibile incrementare il carico 4
25 Controllo di carico 5
26 Controllo di spostamento Si procede incrementando lo spostamento Se si controllasse l incremento di carico si perderebbe convergenza 6
27 Controllo di spostamento 7 Corso di Meccanica delle Strutture- ing. Elena Benvenuti
28 Necessità di tecniche avanzate: presenza di snap bac e snap through Controllo di spostamento e di carico falliscono: Arc length 8
29 Necessità di tecniche avanzate: presenza di snap bac e snap through Controllo di spostamento e di carico falliscono: Arc length 9
30 Necessita di tecniche avanzate: presenza di snap bac e snap through 30
31 Necessita di tecniche avanzate: presenza di snap bac e snap through 31
32 Necessita di tecniche avanzate: presenza di snap bac e snap through 3
33 METODO ARC-LENGTH Si consideri l equazione di equilibrio seguente g(p, λ qi (p λqef 0 dove: q i (p : forze interne funzioni del vettore spostamenti p q ef : vettore delle forze nodali esterne fissate λ: parametro di carico che moltiplica q ef 33
34 METODO ARC-LENGTH Si consideri l equazione di equilibrio g( p, λ q i λq ef Il metodo arc-length (Ris 197- Wempner 1971 si basa sulla ricerca dell intersezione tra la curva del percorso strutturale e l arco di circonferenza centrato nel punto iniziale del passo di equazione 0 s ds ds dp t dp + dλ ψ q t ef q ef Dove ψ e un parametro dimensionale necessario per poter calcolare ds 34
35 METODO ARC-LENGTH Dato l arco di raggio costante l, si studia la curva di equazione a T p p + λ ψ q q l T ef ef 0 Si tratta di un equazione non lineare, pertanto la si risolve con il metodo di N-R facendo sistema con l equazione di equilibrio g g gn g0 + δp + δλ g0 + K1δp qefδλ 0 p λ a n a 0 + p t δp + λδλψ q t ef q ef 0 35
36 METODO ARC-LENGTH 36
37 ARC-LENGTH sferico 37
38 ARC-LENGTH cilindrico 38
39 ARC-LENGTH ellittico 39
40 ARC-LENGTH linearizzato 40
41 Tecniche per aumentare la velocità di convergenza λ n n I d λ 0 I 0 Valore di tentativo iniziale 41
42 ANALISI ITERATIVA-INCREMENTALE 1/ Si applica un incremento di carico/spostamento e si risolve il problema nel passo finito / Anche il problema incrementale nel passo finito e non lineare e pertanto viene risolto con una procedura non-lineare alla N-R 4
43 ANALISI ITERATIVA-INCREMENTALE 43
44 ANALISI ITERATIVA-INCREMENTALE: ciclo 44
45 Esempio: von Mises truss 45
46 Esempio: von Mises truss 46
47 Esempio: von Mises truss Controllo di carico fallisce 47
48 Esempio: von Mises truss arc length robusto ed efficiente 48
49 Esempio: von Mises truss 49
50 Esempio: Lee frame 50
51 Esempio: Lee frame La convergenza non e sempre garantita 51
MECCANICA COMPUTAZIONALE
 MECCANICA COMPUTAZIONALE Capitolo 6 Introduzione all analisi non-lineare Rev. 1/06/006 (rev. 1/06/006) Capitolo 6: 1/5 Argomenti trattati nel capitolo 6 Non-linearità fisica e geometrica Metodi di analisi
MECCANICA COMPUTAZIONALE Capitolo 6 Introduzione all analisi non-lineare Rev. 1/06/006 (rev. 1/06/006) Capitolo 6: 1/5 Argomenti trattati nel capitolo 6 Non-linearità fisica e geometrica Metodi di analisi
Daniela Lera A.A. 2008-2009
 Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2008-2009 Equazioni non lineari Metodo di Newton Il metodo di Newton sfrutta le informazioni sulla funzione
Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2008-2009 Equazioni non lineari Metodo di Newton Il metodo di Newton sfrutta le informazioni sulla funzione
Derivazione numerica. Introduzione al calcolo numerico. Derivazione numerica (II) Derivazione numerica (III)
 Derivazione numerica (III)") Derivazione numerica Introduzione al calcolo numerico Il calcolo della derivata di una funzione in un punto implica un processo al limite che può solo essere approssimato da un calcolatore. Supponiamo
Derivazione numerica Introduzione al calcolo numerico Il calcolo della derivata di una funzione in un punto implica un processo al limite che può solo essere approssimato da un calcolatore. Supponiamo
Il metodo di Gauss-Newton per le regressioni non-lineari
 Il metodo di Gauss-Newton per le regressioni non-lineari Andrea Onofri Dipartimento di Scienze Agrarie ed Ambientali Università degli Studi di Perugia Versione on-line: http://www.unipg.it/ onofri/rtutorial/index.html
Il metodo di Gauss-Newton per le regressioni non-lineari Andrea Onofri Dipartimento di Scienze Agrarie ed Ambientali Università degli Studi di Perugia Versione on-line: http://www.unipg.it/ onofri/rtutorial/index.html
Claudio Estatico Equazioni non-lineari
 Claudio Estatico (claudio.estatico@uninsubria.it) Equazioni non-lineari 1 Equazioni non-lineari 1) Equazioni non-lineari e metodi iterativi. 2) Metodo di bisezione, metodo regula-falsi. 3) Metodo di Newton.
Claudio Estatico (claudio.estatico@uninsubria.it) Equazioni non-lineari 1 Equazioni non-lineari 1) Equazioni non-lineari e metodi iterativi. 2) Metodo di bisezione, metodo regula-falsi. 3) Metodo di Newton.
Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]).
![Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]).](/thumbs/102/156832982.jpg "Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]).") Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]). Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]). Esempio 1: equazioni polinomiali p N (x)
Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]). Equazioni non lineari: esempi. Risoluzione f (x) = 0 con x [a,b] R, f C([a,b]). Esempio 1: equazioni polinomiali p N (x)
Metodi di Iterazione Funzionale
 Appunti di Matematica Computazionale Lezione Metodi di Iterazione Funzionale Il problema di calcolare il valore per cui F() = si può sempre trasformare in quello di trovare il punto fisso di una funzione
Appunti di Matematica Computazionale Lezione Metodi di Iterazione Funzionale Il problema di calcolare il valore per cui F() = si può sempre trasformare in quello di trovare il punto fisso di una funzione
Daniela Lera A.A
 Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2016-2017 Problemi non lineari Definizione f : R R F : R n R m f (x) = 0 F(x) = 0 In generale si determina
Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2016-2017 Problemi non lineari Definizione f : R R F : R n R m f (x) = 0 F(x) = 0 In generale si determina
METODO DEGLI ELEMENTI FINITI
 L'equazione di equilibrio di una struttura discretizzata in elementi finiti è: {F}=[K]{d} nella quale {F} è il vettore delle forze nodali, [K] è la matrice di rigidezza della struttura e {d} è il vettore
L'equazione di equilibrio di una struttura discretizzata in elementi finiti è: {F}=[K]{d} nella quale {F} è il vettore delle forze nodali, [K] è la matrice di rigidezza della struttura e {d} è il vettore
Metodi di Ricerca Lineare
 Metodi di Ricerca Lineare Stefano Gualandi Università di Pavia, Dipartimento di Matematica email: twitter: blog: stefano.gualandi@unipv.it @famo2spaghi http://stegua.github.com Metodi di Ottimizzazione
Metodi di Ricerca Lineare Stefano Gualandi Università di Pavia, Dipartimento di Matematica email: twitter: blog: stefano.gualandi@unipv.it @famo2spaghi http://stegua.github.com Metodi di Ottimizzazione
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dott.ssa M.C. De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Risoluzione di Equazioni non lineari Sia
Corso di Calcolo Numerico Dott.ssa M.C. De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Risoluzione di Equazioni non lineari Sia
Problema. Equazioni non lineari. Metodo grafico. Teorema. Cercare la soluzione di
 Problema Cercare la soluzione di Equazioni non lineari dove Se è soluzione dell equazione, cioè allora si dice RADICE o ZERO della funzione Metodo grafico Graficamente si tratta di individuare l intersezione
Problema Cercare la soluzione di Equazioni non lineari dove Se è soluzione dell equazione, cioè allora si dice RADICE o ZERO della funzione Metodo grafico Graficamente si tratta di individuare l intersezione
Corso di Matematica per la Chimica. Dott.ssa Maria Carmela De Bonis a.a
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Risoluzione di Equazioni non lineari Sia F C 0 ([a, b]), cioé F è una funzione continua in un intervallo [a, b] R, tale che F(a)F(b) < 0 1.5 1 F(b) 0.5 0 a
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Risoluzione di Equazioni non lineari Sia F C 0 ([a, b]), cioé F è una funzione continua in un intervallo [a, b] R, tale che F(a)F(b) < 0 1.5 1 F(b) 0.5 0 a
Equazioni e sistemi non lineari
 Equazioni e sistemi non lineari Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di Newton-Raphson
Equazioni e sistemi non lineari Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di Newton-Raphson
Analisi non-lineare con FEMAS
 Corso di Meccanica Computazionale delle Strutture I Luca Salvatori Analisi non-lineare con FEMAS 1/29 Introduzione P Struttura V INPUT (carichi esterni) V Sistema fisico = (,"t" ) V P sistema di equazioni
Corso di Meccanica Computazionale delle Strutture I Luca Salvatori Analisi non-lineare con FEMAS 1/29 Introduzione P Struttura V INPUT (carichi esterni) V Sistema fisico = (,"t" ) V P sistema di equazioni
CALCOLO NUMERICO Laurea di base in Ingegneria Elettronica, delle Comunicazioni
 CALCOLO NUMERICO Laurea di base in Ingegneria Elettronica, delle Comunicazioni Prof.ssa Laura Pezza (A.A. 2017-2018) V Lezione del 15.03.2018 http://www.dmmm.uniroma1.it/ laura.pezza 1 Metodo di Newton:
CALCOLO NUMERICO Laurea di base in Ingegneria Elettronica, delle Comunicazioni Prof.ssa Laura Pezza (A.A. 2017-2018) V Lezione del 15.03.2018 http://www.dmmm.uniroma1.it/ laura.pezza 1 Metodo di Newton:
3.7 Metodi quasi-newton
 3.7 Metodi quasi-newton Varianti del metodo di Newton in cui invece di usare/invertire la matrice Hessiana di f si estraggono informazioni relative alle derivate seconde dalle variazioni di f. Si genera
3.7 Metodi quasi-newton Varianti del metodo di Newton in cui invece di usare/invertire la matrice Hessiana di f si estraggono informazioni relative alle derivate seconde dalle variazioni di f. Si genera
Equazioni e sistemi non lineari
 Equazioni e sistemi non lineari Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di Newton-Raphson
Equazioni e sistemi non lineari Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di Newton-Raphson
Analisi cinematica di meccanismi articolati
 Analisi cinematica di meccanismi articolati metodo dei numeri complessi rev 10 1 Il quadrilatero articolato b β a c α d γ Posizione a + b = c + d a e iα + b e iβ = c e iγ + d a cos α + b cos β = c cos
Analisi cinematica di meccanismi articolati metodo dei numeri complessi rev 10 1 Il quadrilatero articolato b β a c α d γ Posizione a + b = c + d a e iα + b e iβ = c e iγ + d a cos α + b cos β = c cos
Il Metodo di Newton, o delle Tangenti Federico Lastaria, Analisi e Geometria 1. Politecnico di Milano Corso di Analisi e Geometria 1
 Politecnico di Milano Corso di Analisi e Geometria 1 Federico Lastaria federico.lastaria@polimi.it Il Metodo di Newton, o delle Tangenti 6 Novembre 2016 Indice 1 Metodo di Newton, o delle tangenti 2 1.1
Politecnico di Milano Corso di Analisi e Geometria 1 Federico Lastaria federico.lastaria@polimi.it Il Metodo di Newton, o delle Tangenti 6 Novembre 2016 Indice 1 Metodo di Newton, o delle tangenti 2 1.1
Raccolta di esercizi di Calcolo Numerico Prof. Michela Redivo Zaglia
 Raccolta di esercizi di Calcolo Numerico Prof. Michela Redivo Zaglia Nota Bene: Gli esercizi di questa raccolta sono solo degli esempi. Non sono stati svolti né verificati e servono unicamente da spunto
Raccolta di esercizi di Calcolo Numerico Prof. Michela Redivo Zaglia Nota Bene: Gli esercizi di questa raccolta sono solo degli esempi. Non sono stati svolti né verificati e servono unicamente da spunto
Metodi iterativi per equazioni nonlineari.
 Metodi iterativi per equazioni nonlineari. Alvise Sommariva Università degli Studi di Padova Dipartimento di Matematica 9 aprile 2016 Alvise Sommariva Introduzione 1/ 14 Introduzione Si supponga sia f
Metodi iterativi per equazioni nonlineari. Alvise Sommariva Università degli Studi di Padova Dipartimento di Matematica 9 aprile 2016 Alvise Sommariva Introduzione 1/ 14 Introduzione Si supponga sia f
MECCANICA COMPUTAZIONALE DELLE STRUTTURE
 MEANIA OMPUTAZIONALE DELLE STRUTTURE Elio Sacco DiMSAT Università di assino Tel: 0776.299659 Email: sacco@unicas.it Motivazione Fenomeno in natura Leggi della fisica Risoluzione (Meccanica computazionale)
MEANIA OMPUTAZIONALE DELLE STRUTTURE Elio Sacco DiMSAT Università di assino Tel: 0776.299659 Email: sacco@unicas.it Motivazione Fenomeno in natura Leggi della fisica Risoluzione (Meccanica computazionale)
Figura 2.5. Arco a tre cerniere allineate sotto carico.
 10 Effetti geometrici in strutture elastiche 37 quelle di compatibilità cinematica ammettono sempre soluzione unica, per cui si possono sempre determinare gli sforzi normali dovuti ad un carico esterno
10 Effetti geometrici in strutture elastiche 37 quelle di compatibilità cinematica ammettono sempre soluzione unica, per cui si possono sempre determinare gli sforzi normali dovuti ad un carico esterno
Metodi di Ottimizzazione
 Metodi di Ottimizzazione Stefano Gualandi Università di Pavia, Dipartimento di Matematica email: twitter: blog: stefano.gualandi@unipv.it @famospaghi, @famoconti http://stegua.github.com Metodi di Ottimizzazione
Metodi di Ottimizzazione Stefano Gualandi Università di Pavia, Dipartimento di Matematica email: twitter: blog: stefano.gualandi@unipv.it @famospaghi, @famoconti http://stegua.github.com Metodi di Ottimizzazione
data una funzione f, non lineare calcolare le soluzioni dell equazione f(x) = 0 in un intervallo [a,b]
![data una funzione f, non lineare calcolare le soluzioni dell equazione f(x) = 0 in un intervallo [a,b]](/thumbs/103/161088450.jpg "data una funzione f, non lineare calcolare le soluzioni dell equazione f(x) = 0 in un intervallo [a,b]") RISOLUZIONE NUMERICA DI EQUAZIONI NON LINEARI PROBLEMA: data una funzione f, non lineare calcolare le soluzioni dell equazione f() = 0 in un intervallo [a,b] 1 f ( ) = log( ) +, (0,10) ξ Esiste una sola
RISOLUZIONE NUMERICA DI EQUAZIONI NON LINEARI PROBLEMA: data una funzione f, non lineare calcolare le soluzioni dell equazione f() = 0 in un intervallo [a,b] 1 f ( ) = log( ) +, (0,10) ξ Esiste una sola
Sistemi Intelligenti Relazione tra ottimizzazione e statistica - IV Alberto Borghese
 Sistemi Intelligenti Relazione tra ottimizzazione e statistica - IV Alberto Borghese Università degli Studi di Milano Laboratory of Applied Intelligent Systems (AIS-Lab) Dipartimento di Informatica borghese@di.unimi.it
Sistemi Intelligenti Relazione tra ottimizzazione e statistica - IV Alberto Borghese Università degli Studi di Milano Laboratory of Applied Intelligent Systems (AIS-Lab) Dipartimento di Informatica borghese@di.unimi.it
RISOLUZIONE APPROSSIMATA DI UN EQUAZIONE
 RISOLUZIONE APPROSSIMATA DI UN EQUAZIONE Introduzione Si vogliano individuare, se esistono, le radici o soluzioni dell equazione f(x)=0. Se f(x) è un polinomio di grado superiore al secondo o se è una
RISOLUZIONE APPROSSIMATA DI UN EQUAZIONE Introduzione Si vogliano individuare, se esistono, le radici o soluzioni dell equazione f(x)=0. Se f(x) è un polinomio di grado superiore al secondo o se è una
Elementi finiti solidi
 Esercitazioni del corso di Costruzione di Macchine 2 e Progettazione FEM a cura dell ing. Francesco Villa Elementi finiti solidi Costruzione di Macchine 2 e Progettazione FEM Prof. Sergio Baragetti Dalmine
Esercitazioni del corso di Costruzione di Macchine 2 e Progettazione FEM a cura dell ing. Francesco Villa Elementi finiti solidi Costruzione di Macchine 2 e Progettazione FEM Prof. Sergio Baragetti Dalmine
TECNICHE COMPUTAZIONALI AVANZATE
 TECNICHE COMPUTAZIONALI AVANZATE Francesca Pelosi e Salvatore Filippone Università di Roma Tor Vergata Problemi di diffusione, trasporto, reazione http://www.mat.uniroma2.it/ pelosi/ TECNICHE COMPUTAZIONALI
TECNICHE COMPUTAZIONALI AVANZATE Francesca Pelosi e Salvatore Filippone Università di Roma Tor Vergata Problemi di diffusione, trasporto, reazione http://www.mat.uniroma2.it/ pelosi/ TECNICHE COMPUTAZIONALI
Complementi di Matematica e Calcolo Numerico A.A Laboratorio 4 - Metodi di Newton e Punto fisso
 Complementi di Matematica e Calcolo Numerico A.A. 2011-2012 Laboratorio 4 - Metodi di Newton e Punto fisso [1] Metodo di Newton Costruire una MATLAB FUNCTION che, dati dall utente: una funzione f una funzione
Complementi di Matematica e Calcolo Numerico A.A. 2011-2012 Laboratorio 4 - Metodi di Newton e Punto fisso [1] Metodo di Newton Costruire una MATLAB FUNCTION che, dati dall utente: una funzione f una funzione
Metodi per il calcolo degli zeri di funzioni non lineari
 Metodi per il calcolo degli zeri di funzioni non lineari N. Del Buono 1 Introduzione Le radici di un equazione non lineare f(x) = 0 non possono, in generale, essere espresse esplicitamente e anche quando
Metodi per il calcolo degli zeri di funzioni non lineari N. Del Buono 1 Introduzione Le radici di un equazione non lineare f(x) = 0 non possono, in generale, essere espresse esplicitamente e anche quando
11 Piccole oscillazioni attorno a posizioni stabili
 11 Piccole oscillazioni attorno a posizioni stabili Consideriamo un sistema con l gradi di libertà descrivibile mediante le coordinate lagrangiane (q 1,..., q l ). Supponiamo che i vincoli siano lisci
11 Piccole oscillazioni attorno a posizioni stabili Consideriamo un sistema con l gradi di libertà descrivibile mediante le coordinate lagrangiane (q 1,..., q l ). Supponiamo che i vincoli siano lisci
Cenni sui metodi iterativi per sistemi lineari. Analisi Numerica Prof. M. Lucia Sampoli a.a. 2014/2015
 Cenni sui metodi iterativi per sistemi lineari Analisi Numerica Prof. M. Lucia Sampoli a.a. 2014/2015 Metodi numerici per sistemi lineari Nei metodi diretti la presenza di eventuali elementi nulli nella
Cenni sui metodi iterativi per sistemi lineari Analisi Numerica Prof. M. Lucia Sampoli a.a. 2014/2015 Metodi numerici per sistemi lineari Nei metodi diretti la presenza di eventuali elementi nulli nella
Polinomi. I polinomi della forma
 I polinomi della forma Polinomi p(x) = a 0 +a 1 x+a 2 x 2 + +a N x N richiedono N potenze, N somme e N moltiplicazioni per essere valutati Un metodo più efficiente (Horner) è p(x) = a 0 +x (a 1 +x (a 2
I polinomi della forma Polinomi p(x) = a 0 +a 1 x+a 2 x 2 + +a N x N richiedono N potenze, N somme e N moltiplicazioni per essere valutati Un metodo più efficiente (Horner) è p(x) = a 0 +x (a 1 +x (a 2
4.8 Metodi quasi-newton
 4.8 Metodi quasi-newton Varianti del metodo di Newton in cui invece di usare/invertire la matrice Hessiana di f (x) si estraggono informazioni relative alle derivate seconde dalle variazioni di f (x).
4.8 Metodi quasi-newton Varianti del metodo di Newton in cui invece di usare/invertire la matrice Hessiana di f (x) si estraggono informazioni relative alle derivate seconde dalle variazioni di f (x).
Metodi Numerici con elementi di Programmazione (A.A )
") Metodi Numerici con elementi di Programmazione (A.A. 2013-2014) Metodi Numerici Appunti delle lezioni: Sistemi non lineari Docente Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it Ufficio: Via A.
Metodi Numerici con elementi di Programmazione (A.A. 2013-2014) Metodi Numerici Appunti delle lezioni: Sistemi non lineari Docente Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it Ufficio: Via A.
Raccolta di Esercizi d esame ( di Calcolo Numerico) Prof. Laura Pezza. Equazioni non lineari
 Prof. Laura Pezza. Equazioni non lineari") Raccolta di Esercizi d esame ( di Calcolo Numerico) Prof. Laura Pezza Equazioni non lineari ESERCIZIO 1 Data l equazione ln(e + x) = 1 (1 + 4x) + 1 2 1.1 verificare analiticamente se sono soddisfatte le
Raccolta di Esercizi d esame ( di Calcolo Numerico) Prof. Laura Pezza Equazioni non lineari ESERCIZIO 1 Data l equazione ln(e + x) = 1 (1 + 4x) + 1 2 1.1 verificare analiticamente se sono soddisfatte le
Universita degli Studi di Ancona - Facolta di Ingegneria Laurea in Ing. Elettronica (VO) Ing. Informatica e Automatica - Ing. delle Telecomunicazioni
 Ing. Informatica e Automatica - Ing. delle Telecomunicazioni") Universita degli Studi di Ancona - Facolta di Ingegneria Laurea in Ing. Elettronica (VO) Ing. Informatica e Automatica - Ing. delle Telecomunicazioni ANALISI NUMERICA - Primo Parziale - TEMA A (Prof. A.M.Perdon)
Universita degli Studi di Ancona - Facolta di Ingegneria Laurea in Ing. Elettronica (VO) Ing. Informatica e Automatica - Ing. delle Telecomunicazioni ANALISI NUMERICA - Primo Parziale - TEMA A (Prof. A.M.Perdon)
Parte V: Rilassamento Lagrangiano
 Parte V: Rilassamento Lagrangiano Tecnica Lagrangiana Consideriamo il seguente problema di Programmazione Lineare Intera: P 1 min c T x L I Ax > b Cx > d x > 0, intera in cui A = matrice m x n C = matrice
Parte V: Rilassamento Lagrangiano Tecnica Lagrangiana Consideriamo il seguente problema di Programmazione Lineare Intera: P 1 min c T x L I Ax > b Cx > d x > 0, intera in cui A = matrice m x n C = matrice
Capitolo 3: Ottimizzazione non vincolata parte III. E. Amaldi DEI, Politecnico di Milano
 Capitolo 3: Ottimizzazione non vincolata parte III E. Amaldi DEI, Politecnico di Milano 3.4 Metodi di ricerca unidimensionale In genere si cerca una soluzione approssimata α k di min g(α) = f(x k +αd k
Capitolo 3: Ottimizzazione non vincolata parte III E. Amaldi DEI, Politecnico di Milano 3.4 Metodi di ricerca unidimensionale In genere si cerca una soluzione approssimata α k di min g(α) = f(x k +αd k
La determinazione delle radici in forma chiusa non è sempre possibile (già per polinomi di ordine 5 non è generalmente possibile).
.") SOLUZIONE DI EQUAZIONI NON-LINEARI Molti problemi sono espressi nella forma f(x) = 0 con f(x) funzione non lineare (es. log(x 2 + a) + b cos x = 0, x 5 + ax 3 + b = 0) La determinazione delle radici in
SOLUZIONE DI EQUAZIONI NON-LINEARI Molti problemi sono espressi nella forma f(x) = 0 con f(x) funzione non lineare (es. log(x 2 + a) + b cos x = 0, x 5 + ax 3 + b = 0) La determinazione delle radici in
Definizione (Derivata come limite del rapporto incrementale) Se esiste finito (cioè, non + o ) il limite del rapporto incrementale
 Se esiste finito (cioè, non + o ) il limite del rapporto incrementale") Funzione derivabile. La derivata. Dati: f I R funzione; I R intervallo aperto ; x 0 I. Definizione (Derivata come ite del rapporto incrementale) Se esiste finito (cioè, non + o ) il ite del rapporto incrementale
Funzione derivabile. La derivata. Dati: f I R funzione; I R intervallo aperto ; x 0 I. Definizione (Derivata come ite del rapporto incrementale) Se esiste finito (cioè, non + o ) il ite del rapporto incrementale
Richiami di topologia di R n e di calcolo differenziale in più variabili
 Anno accademico: 2016-2017 Corso di laurea in Ingegneria Aerospaziale e Ingegneria dell Autoveicolo Programma di Analisi Matematica II (6 CFU) (codice: 22ACILZ e 22ACILN) Docente: Lancelotti Sergio Richiami
Anno accademico: 2016-2017 Corso di laurea in Ingegneria Aerospaziale e Ingegneria dell Autoveicolo Programma di Analisi Matematica II (6 CFU) (codice: 22ACILZ e 22ACILN) Docente: Lancelotti Sergio Richiami
Equazioni non lineari
 Equazioni non lineari Corso di Calcolo Numerico, a.a. 2009/2010 Francesca Mazzia Dipartimento di Matematica Università di Bari Francesca Mazzia (Univ. Bari) Equazioni non lineari 1 / 40 Problema Data una
Equazioni non lineari Corso di Calcolo Numerico, a.a. 2009/2010 Francesca Mazzia Dipartimento di Matematica Università di Bari Francesca Mazzia (Univ. Bari) Equazioni non lineari 1 / 40 Problema Data una
Calcolo Numerico Laurea di base in Ingegneria Elettronica e delle Telecomunicazioni
 Calcolo Numerico Laurea di base in Ingegneria Elettronica e delle Telecomunicazioni Prof.ssa L. Pezza (A.A. 2017-2018) IV Lezione del 13.03.2018 http://www.dmmm.uniroma1.it/ laura.pezza 1 Equazioni non
Calcolo Numerico Laurea di base in Ingegneria Elettronica e delle Telecomunicazioni Prof.ssa L. Pezza (A.A. 2017-2018) IV Lezione del 13.03.2018 http://www.dmmm.uniroma1.it/ laura.pezza 1 Equazioni non
METODI DI PUNTO FISSO
 METODI DI PUNTO FISSO Sia ϕ : [a, b] R [a, b] continua. Def. α è punto fisso per ϕ se ϕ(α) = α Il metodo di punto fisso è: { x (0) dato x (k+1) = ϕ(x (k) ), per k 0 Scrivere una function per l approssimazione
METODI DI PUNTO FISSO Sia ϕ : [a, b] R [a, b] continua. Def. α è punto fisso per ϕ se ϕ(α) = α Il metodo di punto fisso è: { x (0) dato x (k+1) = ϕ(x (k) ), per k 0 Scrivere una function per l approssimazione
Lezioni sullo studio di funzione.
 Lezioni sullo studio di funzione. Schema. 1. Calcolare il dominio della funzione D(f).. Comportamento della funzione agli estremi del dominio. Ad esempio se D(f) = [a, b] si dovrà calcolare f(a) e f(b),
Lezioni sullo studio di funzione. Schema. 1. Calcolare il dominio della funzione D(f).. Comportamento della funzione agli estremi del dominio. Ad esempio se D(f) = [a, b] si dovrà calcolare f(a) e f(b),
Equazioni e sistemi non lineari
 Equazioni e sistemi non lineari Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 4 novembre 2007 Outline 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di
Equazioni e sistemi non lineari Lucia Gastaldi Dipartimento di Matematica, http://dm.ing.unibs.it/gastaldi/ 4 novembre 2007 Outline 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di
Metodi Numerici con elementi di Programmazione (A.A )
") Metodi Numerici con elementi di Programmazione (A.A. 2018-2019) Metodi Numerici Appunti delle lezioni: Sistemi non lineari Docente Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it Ufficio: Via A.
Metodi Numerici con elementi di Programmazione (A.A. 2018-2019) Metodi Numerici Appunti delle lezioni: Sistemi non lineari Docente Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it Ufficio: Via A.
Esercizi su polinomio di Taylor, metodi numerici per il calcolo di zeri di funzione e iterazioni di punto fisso
 Esercizi su polinomio di Taylor, metodi numerici per il calcolo di zeri di funzione e iterazioni di punto fisso 2 aprile 215 Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ). Richiami
Esercizi su polinomio di Taylor, metodi numerici per il calcolo di zeri di funzione e iterazioni di punto fisso 2 aprile 215 Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ). Richiami
Corso di Analisi Numerica - AN1. Parte 3: metodi iterativi per sistemi lineari ed. equazioni nonlineari. Roberto Ferretti
 Corso di Analisi Numerica - AN1 Parte 3: metodi iterativi per sistemi lineari ed equazioni nonlineari Roberto Ferretti Filosofia generale dei metodi iterativi Metodi iterativi per Sistemi Lineari Convergenza
Corso di Analisi Numerica - AN1 Parte 3: metodi iterativi per sistemi lineari ed equazioni nonlineari Roberto Ferretti Filosofia generale dei metodi iterativi Metodi iterativi per Sistemi Lineari Convergenza
Laboratorio di Calcolo Numerico
 Laboratorio di Calcolo Numerico M.R. Russo Università degli Studi di Padova Dipartimento di Matematica Pura ed Applicata A.A. 2009/2010 Equazioni non lineari Data una funzione consideriamo il problema
Laboratorio di Calcolo Numerico M.R. Russo Università degli Studi di Padova Dipartimento di Matematica Pura ed Applicata A.A. 2009/2010 Equazioni non lineari Data una funzione consideriamo il problema
Appunti sul corso di Complementi di Matematica mod. Analisi prof. B.Bacchelli - a.a. 2010/2011.
 Appunti sul corso di Complementi di Matematica mod. Analisi prof. B.Baccelli - a.a. 2010/2011. 06 - Derivate, differenziabilità, piano tangente, derivate di ordine superiore. Riferimenti: R.Adams, Calcolo
Appunti sul corso di Complementi di Matematica mod. Analisi prof. B.Baccelli - a.a. 2010/2011. 06 - Derivate, differenziabilità, piano tangente, derivate di ordine superiore. Riferimenti: R.Adams, Calcolo
Corso di Robotica 1 Cinematica inversa
 Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Analisi Numerica - AN410. Parte 3: metodi iterativi per sistemi lineari ed. equazioni nonlineari. Roberto Ferretti
 Corso di Analisi Numerica - AN410 Parte 3: metodi iterativi per sistemi lineari ed equazioni nonlineari Roberto Ferretti UNIVERSITÀ DEGLI STUDI ROMA TRE Filosofia generale dei metodi iterativi Metodi iterativi
Corso di Analisi Numerica - AN410 Parte 3: metodi iterativi per sistemi lineari ed equazioni nonlineari Roberto Ferretti UNIVERSITÀ DEGLI STUDI ROMA TRE Filosofia generale dei metodi iterativi Metodi iterativi
variabili. se i limiti esistono e si chiamano rispettivamente derivata parziale rispetto ad x e rispetto ad y.
 Funzioni di più variabili Derivate parziali Qui saranno considerate soltanto funzioni di due variabili, ma non c è nessuna difficoltà ad estendere le nuove nozioni a funzioni di n ( > variabili ( Definizione:
Funzioni di più variabili Derivate parziali Qui saranno considerate soltanto funzioni di due variabili, ma non c è nessuna difficoltà ad estendere le nuove nozioni a funzioni di n ( > variabili ( Definizione:
Corso di Laurea in Ingegneria Informatica Analisi Numerica
 Corso di Laurea in Ingegneria Informatica Lucio Demeio Dipartimento di Scienze Matematiche 1 2 Analisi degli errori Informazioni generali Libro di testo: J. D. Faires, R. Burden, Numerical Analysis, Brooks/Cole,
Corso di Laurea in Ingegneria Informatica Lucio Demeio Dipartimento di Scienze Matematiche 1 2 Analisi degli errori Informazioni generali Libro di testo: J. D. Faires, R. Burden, Numerical Analysis, Brooks/Cole,
3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI
 3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI ESISTENZA DI UN PUNTO DI OTTIMO VINCOLATO Il problema di ottimizzazione vincolata introdotto nel paragrafo precedente può essere formulato nel modo seguente:
3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI ESISTENZA DI UN PUNTO DI OTTIMO VINCOLATO Il problema di ottimizzazione vincolata introdotto nel paragrafo precedente può essere formulato nel modo seguente:
Soluzione numerica di equazioni differenziali
 Soluzione numerica di equazioni differenziali Laboratorio di programmazione e calcolo (Chimica e Tecnologie chimiche) Pierluigi Amodio Dipartimento di Matematica Università di Bari Soluzione numerica di
Soluzione numerica di equazioni differenziali Laboratorio di programmazione e calcolo (Chimica e Tecnologie chimiche) Pierluigi Amodio Dipartimento di Matematica Università di Bari Soluzione numerica di
Funzione derivabile. La derivata.
 Funzione derivabile. La derivata. Dati: f I R funzione; I R intervallo aperto ; x 0 I. Definizione (Derivata come limite del rapporto incrementale) Se esiste finito (cioè, non + o ) il limite del rapporto
Funzione derivabile. La derivata. Dati: f I R funzione; I R intervallo aperto ; x 0 I. Definizione (Derivata come limite del rapporto incrementale) Se esiste finito (cioè, non + o ) il limite del rapporto
Laboratorio di Calcolo Numerico A.A Laboratorio 4 Risoluzione di sistemi non lineari Metodo di punto fisso
 Laboratorio di Calcolo Numerico A.A. 2007-2008 Laboratorio 4 Risoluzione di sistemi non lineari Metodo di punto fisso Esercizio 1. Risoluzione di sistemi non lineari Si consideri il seguente sistema non
Laboratorio di Calcolo Numerico A.A. 2007-2008 Laboratorio 4 Risoluzione di sistemi non lineari Metodo di punto fisso Esercizio 1. Risoluzione di sistemi non lineari Si consideri il seguente sistema non
METODO DEGLI ELEMENTI FINITI
 Introduzione al METODO DEGLI ELEMENTI FINITI Osservazioni sui metodi variazionali approssimati classici Le funzioni approssimanti devono: Soddisfare i requisiti di continuità Essere linearmente indipendenti
Introduzione al METODO DEGLI ELEMENTI FINITI Osservazioni sui metodi variazionali approssimati classici Le funzioni approssimanti devono: Soddisfare i requisiti di continuità Essere linearmente indipendenti
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dott.ssa M.C. De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Risoluzione di Equazioni Algebriche Le equazioni
Corso di Calcolo Numerico Dott.ssa M.C. De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Risoluzione di Equazioni Algebriche Le equazioni
Dalla meccanica del continuo alle Equazioni di Lagrange g per i solidi elastici. Dinamica delle Strutture Aerospaziali
 Dalla meccanica del continuo alle Equazioni di Lagrange g per i solidi elastici Franco Mastroddi http://www.diaa.uniroma1.it/docenti/f.mastroddi dal Dinamica delle Strutture Aerospaziali Anno Accademico
Dalla meccanica del continuo alle Equazioni di Lagrange g per i solidi elastici Franco Mastroddi http://www.diaa.uniroma1.it/docenti/f.mastroddi dal Dinamica delle Strutture Aerospaziali Anno Accademico
Compito numero 2 - Compito intero
 Esercitazione 6 - Correzione esame dell 8//3 Lucia Pilleri 9//3 Compito numero - Compito intero Esercizio del parziale - del compito intero Risolvere, mediante la fattorizzazione P A = LU, il sistema lineare
Esercitazione 6 - Correzione esame dell 8//3 Lucia Pilleri 9//3 Compito numero - Compito intero Esercizio del parziale - del compito intero Risolvere, mediante la fattorizzazione P A = LU, il sistema lineare
Argomento 6: Derivate Esercizi. I Parte - Derivate
 6: Derivate Esercizi I Parte - Derivate E. 6.1 Calcolare le derivate delle seguenti funzioni: 1) log 5 3 + cos ) + 3 + 4 + 3 3) 5 tan 4) ( + 3e ) sin 5) arctan( + 1) 6) log 7) 10) + + 3 8) 3 3 1 + 16 11)
6: Derivate Esercizi I Parte - Derivate E. 6.1 Calcolare le derivate delle seguenti funzioni: 1) log 5 3 + cos ) + 3 + 4 + 3 3) 5 tan 4) ( + 3e ) sin 5) arctan( + 1) 6) log 7) 10) + + 3 8) 3 3 1 + 16 11)
PALI DI FONDAZIONE E PALIFICATE
 PALI DI FONDAZIONE E PALIFICATE 7. ANALISI DELLE FONDAZIONI IN CONDIZIONI DI ESERCIZIO ANALISI DEL PALO SINGOLO Palo soggetto a forze verticali - stima attraverso relazioni empiriche - metodo delle curve
PALI DI FONDAZIONE E PALIFICATE 7. ANALISI DELLE FONDAZIONI IN CONDIZIONI DI ESERCIZIO ANALISI DEL PALO SINGOLO Palo soggetto a forze verticali - stima attraverso relazioni empiriche - metodo delle curve
Riferimenti: R.Adams, Calcolo Differenziale 2. Capitoli 3.4, 3.9. Esercizi 3.4, 3.9.
 Appunti sul corso di Complementi di Matematica - mod Analisi prof. B.Baccelli 200/ 07 - Funzioni vettoriali, derivata della funzione composta, formula di Taylor. Riferimenti: R.Adams, Calcolo Differenziale
Appunti sul corso di Complementi di Matematica - mod Analisi prof. B.Baccelli 200/ 07 - Funzioni vettoriali, derivata della funzione composta, formula di Taylor. Riferimenti: R.Adams, Calcolo Differenziale
Metodi Numerici con elementi di Programmazione (A.A )
") Metodi Numerici con elementi di Programmazione (A.A. 2013-2014) Metodi Numerici Appunti delle lezioni: Equazioni non lineari Metodi di linearizzazione Docente Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it
Metodi Numerici con elementi di Programmazione (A.A. 2013-2014) Metodi Numerici Appunti delle lezioni: Equazioni non lineari Metodi di linearizzazione Docente Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it
Capitolo 2. Equazioni non lineari. 2.1 Metodo di bisezione. 2.2 Ordine dei metodi
 Capitolo 2 Equazioni non lineari 2.1 Metodo di bisezione Data la successione {x n } n prodotta dal metodo di bisezione convergente alla radice ξ di f(x), il criterio d arresto basato sul residuo (cioè
Capitolo 2 Equazioni non lineari 2.1 Metodo di bisezione Data la successione {x n } n prodotta dal metodo di bisezione convergente alla radice ξ di f(x), il criterio d arresto basato sul residuo (cioè
SISSA Area Matematica Esame di ammissione per il corso di Analisi Matematica, Modelli e Applicazioni 2 maggio 2017
 SISSA Area Matematica Esame di ammissione per il corso di Analisi Matematica, Modelli e Applicazioni 2 maggio 217 Il candidato risolva CINQUE dei seguenti problemi, e indichi chiaramente sulla prima pagina
SISSA Area Matematica Esame di ammissione per il corso di Analisi Matematica, Modelli e Applicazioni 2 maggio 217 Il candidato risolva CINQUE dei seguenti problemi, e indichi chiaramente sulla prima pagina
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Risoluzione di Equazioni Algebriche Le equazioni algebriche sono equazioni del tipo P(x) = 0 dove P è un polinomio di grado n cioé P(x) = a 1 x n + a 2 x n
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Risoluzione di Equazioni Algebriche Le equazioni algebriche sono equazioni del tipo P(x) = 0 dove P è un polinomio di grado n cioé P(x) = a 1 x n + a 2 x n
Metodi numerici per zeri di funzioni
 CALCOLO NUMERICO Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari Metodi numerici per zeri di funzioni 1 Metodo delle successive bisezioni Se f(x) C([a, b]) ed f(a) f(b)
CALCOLO NUMERICO Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari Metodi numerici per zeri di funzioni 1 Metodo delle successive bisezioni Se f(x) C([a, b]) ed f(a) f(b)
RENDITE. Ricerca del tasso di una rendita
 RENDITE Ricerca del tasso di una rendita Un problema che si presenta spesso nelle applicazioni è quello di calcolare il tasso di interesse associato a una rendita quando siano note le altre grandezze 1
RENDITE Ricerca del tasso di una rendita Un problema che si presenta spesso nelle applicazioni è quello di calcolare il tasso di interesse associato a una rendita quando siano note le altre grandezze 1
ANALISI MATEMATICA II Sapienza Università di Roma - Laurea in Ingegneria Informatica Esame del 16 febbraio 2016 - Soluzioni compito 1
 ANALISI MATEMATICA II Sapienza Università di Roma - Laurea in Ingegneria Informatica Esame del 6 febbraio 206 - Soluzioni compito E Calcolare, usando i metodi della variabile complessa, il seguente integrale
ANALISI MATEMATICA II Sapienza Università di Roma - Laurea in Ingegneria Informatica Esame del 6 febbraio 206 - Soluzioni compito E Calcolare, usando i metodi della variabile complessa, il seguente integrale
Esercitazione di Calcolo Numerico 1 27 Maggio Calcolare la fattorizzazione P A = LU della matrice A =
 Esercitazione di Calcolo Numerico 1 27 Maggio 29 1. Calcolare la fattorizzazione P A = LU della matrice 1 2 3 A = 2 3 3, ed utilizzarla per risolvere il sistema lineare Ax = b, con b = (1, 2,, 16) T. 2.
Esercitazione di Calcolo Numerico 1 27 Maggio 29 1. Calcolare la fattorizzazione P A = LU della matrice 1 2 3 A = 2 3 3, ed utilizzarla per risolvere il sistema lineare Ax = b, con b = (1, 2,, 16) T. 2.
Istituto d Istruzione Superiore A. Tilgher Ercolano (Na)
") Premessa Istituto d Istruzione Superiore A. Tilgher Ercolano (Na) Questa breve trattazione non vuole costituire una guida completa ed esauriente sull argomento, ma vuole fornire solamente i concetti fondamentali
Premessa Istituto d Istruzione Superiore A. Tilgher Ercolano (Na) Questa breve trattazione non vuole costituire una guida completa ed esauriente sull argomento, ma vuole fornire solamente i concetti fondamentali
26 - Funzioni di più Variabili Limiti e Derivate
 Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 26 - Funzioni di più Variabili Limiti e Derivate Anno Accademico 2013/2014 M.
Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 26 - Funzioni di più Variabili Limiti e Derivate Anno Accademico 2013/2014 M.
APPUNTI DI CALCOLO NUMERICO
 Premessa APPUNTI DI CALCOLO NUMERICO Equazioni non lineari Mawell Sia data una unzione ( ) : non lineare e si cerchino le radici (o gli zeri) della seguente equazione ( ) = di variabile reale con valori
Premessa APPUNTI DI CALCOLO NUMERICO Equazioni non lineari Mawell Sia data una unzione ( ) : non lineare e si cerchino le radici (o gli zeri) della seguente equazione ( ) = di variabile reale con valori
Calcolo Numerico con elementi di programmazione
 Calcolo Numerico con elementi di programmazione (A.A. 2014-2015) Appunti delle lezioni sui metodi per la soluzione di sistemi di equazioni non lineari Sistemi di equazioni non lineari Un sistema di equazioni
Calcolo Numerico con elementi di programmazione (A.A. 2014-2015) Appunti delle lezioni sui metodi per la soluzione di sistemi di equazioni non lineari Sistemi di equazioni non lineari Un sistema di equazioni
Risoluzione di sistemi lineari sparsi e di grandi dimensioni
 Risoluzione di sistemi lineari sparsi e di grandi dimensioni Un sistema lineare Ax = b con A R n n, b R n, è sparso quando il numero di elementi della matrice A diversi da zero è αn, con n α. Una caratteristica
Risoluzione di sistemi lineari sparsi e di grandi dimensioni Un sistema lineare Ax = b con A R n n, b R n, è sparso quando il numero di elementi della matrice A diversi da zero è αn, con n α. Una caratteristica
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame
 Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
inferiore ai 180, ha area uguale al quadrato della corda AD che sottende un arco uguale alla somma dell arco AC e dell arco 180
 L approssimazione di π secondo al-kashi Al-Kashi calcola il π in modo tale che soddisfi una condizione, detta Condizione di Al-Kashi : La circonferenza di un cerchio deve essere espressa in funzione del
L approssimazione di π secondo al-kashi Al-Kashi calcola il π in modo tale che soddisfi una condizione, detta Condizione di Al-Kashi : La circonferenza di un cerchio deve essere espressa in funzione del
Corso di Analisi Numerica
 Corso di Laurea in Ingegneria Informatica Corso di 5 - INTEGRAZIONE NUMERICA Lucio Demeio Dipartimento di Scienze Matematiche 1 Integrazione numerica: formule di Newton-Cotes semplici 2 3 Introduzione
Corso di Laurea in Ingegneria Informatica Corso di 5 - INTEGRAZIONE NUMERICA Lucio Demeio Dipartimento di Scienze Matematiche 1 Integrazione numerica: formule di Newton-Cotes semplici 2 3 Introduzione
VALUTAZIONE DEL RISCHIO SISMICO
 Ing. Emanuele De Angelis SOMMARIO: Scopi dell analisi Criteri di calcolo Livelli prestazionali Curve Push-over e curve di capacità L analisi del rischio sismico di un ponte esistente ha lo scopo di valutare
Ing. Emanuele De Angelis SOMMARIO: Scopi dell analisi Criteri di calcolo Livelli prestazionali Curve Push-over e curve di capacità L analisi del rischio sismico di un ponte esistente ha lo scopo di valutare
1. Sia data la funzione f(x) = x + log x nel proprio insieme di definizione D.
 = x + log x nel proprio insieme di definizione D.") PROVA PRATICA di CALCOLO NUMERICO per Matematica Applicata e Informatica Multimediale Prof. Stefano De Marchi, Dott. Marco Caliari Verona, 08 luglio 2008 Il candidato dovrà scrivere su ogni foglio o file
PROVA PRATICA di CALCOLO NUMERICO per Matematica Applicata e Informatica Multimediale Prof. Stefano De Marchi, Dott. Marco Caliari Verona, 08 luglio 2008 Il candidato dovrà scrivere su ogni foglio o file
Introduzione al problema
 INTRODUZIONE AL PROBLEMA 1 di Simone BIANCO 1 Introduzione al problema Lo scopo della tesi svolta e quello di ricalibrare il colore nelle immagini fotografiche, ovvero: si supponga di avere un immagine
INTRODUZIONE AL PROBLEMA 1 di Simone BIANCO 1 Introduzione al problema Lo scopo della tesi svolta e quello di ricalibrare il colore nelle immagini fotografiche, ovvero: si supponga di avere un immagine
METODO DEGLI ELEMENTI FINITI
 3.4 CENNI SULLA FORMULAZIONE VARIAZIONALE DEL METODO DEGLI SPOSTAMENTI In un corpo elastico caricato da un sistema di forze, l'energia potenziale totale П uguaglia la somma della energia di deformazione
3.4 CENNI SULLA FORMULAZIONE VARIAZIONALE DEL METODO DEGLI SPOSTAMENTI In un corpo elastico caricato da un sistema di forze, l'energia potenziale totale П uguaglia la somma della energia di deformazione
Capitolo 3: Ottimizzazione non vincolata parte II. E. Amaldi DEI, Politecnico di Milano
 Capitolo 3: Ottimizzazione non vincolata parte II E. Amaldi DEI, Politecnico di Milano 3.3 Metodi basati su direzioni di ricerca Problema di ottimizzazione non vincolata: min x R n f(x) con f : R n R di
Capitolo 3: Ottimizzazione non vincolata parte II E. Amaldi DEI, Politecnico di Milano 3.3 Metodi basati su direzioni di ricerca Problema di ottimizzazione non vincolata: min x R n f(x) con f : R n R di
ESERCITAZIONE SUL CRITERIO
 TECNOLOGIE DELLE COSTRUZIONI AEROSPAZIALI ESERCITAZIONE SUL CRITERIO DI JUVINALL Prof. Claudio Scarponi Ing. Carlo Andreotti Ing. Carlo Andreotti 1 IL CRITERIO DI JUVINALL La formulazione del criterio
TECNOLOGIE DELLE COSTRUZIONI AEROSPAZIALI ESERCITAZIONE SUL CRITERIO DI JUVINALL Prof. Claudio Scarponi Ing. Carlo Andreotti Ing. Carlo Andreotti 1 IL CRITERIO DI JUVINALL La formulazione del criterio
Corso di Calcolo Numerico
 Prof. L. Brandolini Corso di Calcolo Numerico Dott.ssa N. Franchina Laboratorio 5 Equazioni differenziali ordinarie: metodi espliciti 25 Novembre 215 Esercizi di implementazione Un equazione differenziale
Prof. L. Brandolini Corso di Calcolo Numerico Dott.ssa N. Franchina Laboratorio 5 Equazioni differenziali ordinarie: metodi espliciti 25 Novembre 215 Esercizi di implementazione Un equazione differenziale
ESERCIZI DI CALCOLO NUMERICO
 Mawell ESERCZ D CLCOLO NUMERCO Sistemi lineari Esercizio : Date e erminare la fattorizzazione LU applicando il pivoting parziale; usando la fattorizzazione LU, risolvere il sistema lineare. Svolgiamo l
Mawell ESERCZ D CLCOLO NUMERCO Sistemi lineari Esercizio : Date e erminare la fattorizzazione LU applicando il pivoting parziale; usando la fattorizzazione LU, risolvere il sistema lineare. Svolgiamo l
MECCANICA APPLICATA. Esercizi di ALLE MACCHINE I POLITECNICO DI BARI. PhD Student: Ing. Ilario De Vincenzo
 POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
3. CALCOLO DIFFERENZIALE PER FUNZIONI DI UNA VARIABILE REALE.
 3. CALCOLO DIFFERENZIALE PER FUNZIONI DI UNA VARIABILE REALE. Molto spesso y = f(x) rappresenta l evoluzione di un fenomeno al passare del tempo x.se siamo interessati a sapere con che rapidità il fenomeno
3. CALCOLO DIFFERENZIALE PER FUNZIONI DI UNA VARIABILE REALE. Molto spesso y = f(x) rappresenta l evoluzione di un fenomeno al passare del tempo x.se siamo interessati a sapere con che rapidità il fenomeno
Premessa 1. Notazione e simbologia Notazione matriciale Notazione tensoriale Operazioni tensoriali in notazione matriciale 7
 Premessa 1 Notazione e simbologia 3 0.1 Notazione matriciale 3 0.2 Notazione tensoriale 4 0.3 Operazioni tensoriali in notazione matriciale 7 Capitolo 7 La teoria delle travi 9 7.1 Le teorie strutturali
Premessa 1 Notazione e simbologia 3 0.1 Notazione matriciale 3 0.2 Notazione tensoriale 4 0.3 Operazioni tensoriali in notazione matriciale 7 Capitolo 7 La teoria delle travi 9 7.1 Le teorie strutturali
Calcolo Numerico A.A Laboratorio 11 Risoluzione di equazioni differenziali ordinarie
 Calcolo Numerico A.A. 2006-2007 Laboratorio 11 Risoluzione di equazioni differenziali ordinarie Esercizio 1. Sia A R 4 4 la matrice A = 4 1 0 0 1 4 1 0 0 1 4 1 0 0 1 4 e A = D + L + U lo splitting di A
Calcolo Numerico A.A. 2006-2007 Laboratorio 11 Risoluzione di equazioni differenziali ordinarie Esercizio 1. Sia A R 4 4 la matrice A = 4 1 0 0 1 4 1 0 0 1 4 1 0 0 1 4 e A = D + L + U lo splitting di A
Fondamenti di Informatica, A.A Compito A
 Fondamenti di Informatica, A.A. 2013-2014 - Compito A 30/07/2014 Prova Pratica L integrale definito di una funzione continua su un intervallo chiuso e limitato può essere calcolato con la regola dei trapezi
Fondamenti di Informatica, A.A. 2013-2014 - Compito A 30/07/2014 Prova Pratica L integrale definito di una funzione continua su un intervallo chiuso e limitato può essere calcolato con la regola dei trapezi