Controlli Industriali
|
|
|
- Cosimo Di Giovanni
- 7 anni fa
- Visualizzazioni
Transcript

1 UNIVERSITÀ DEGLI STUDI DI PERUGIA 1 FACOLTA DI INGEGNERIA Polo Scientifico Didattico di Terni A.A Controlli Industriali
2 Docente: Dot. Mario Luca Fravolini Articolazione del corso Lezioni ed Esercitazioni in aula Orario lezioni Mercoledì: (9-13), Mercoledì: (15-16) Ricevimento studenti: Sistemi di Controllo ed Automazione (A.A ) Prerequisiti: Analisi matematica I, Analisi matematica II, Fisica I,Fisica generale II, (Analisi dei Sistemi?) 2 Obiettivi formativi: Comprendere i principi generali e le modalità di funzionamento dei sistemi di controllo. Comprendere i fondamenti della teoria del controllo allo scopo di saper scegliere ed utilizzare i principali strumenti per L ANALISI e la SINTESI dei sistemi di controllo
3 3 Testo consigliato: Fondamenti di controlli automatici 3/ed Mc Graw-Hill, 2008 P. Bolzern, R. Scattolini, N. Schiavoni Materiale didattico: Lucidi delle Lezioni (disponibili elettronico presso la pagina web del corso). Files Matlab e Simulink relativi ad esempi trattati a lezione. Dispense Integrative.
4 Prova scritta: Modalità d Esame o 1-2 esercizi su ANALISI e SINTESI dei Sistemi di Controllo 4 Punteggio massimo prova scritta : 30 punti Tempo a disposizione prova scritta: ore (alla prova scritta non sono ammessi appunti di alcun genere) Prova orale: A scelta del Docente nel caso in cui si ritenga necessario un approfondimento in seguito alla valutazione della prova scritta (Colloquio esteso a tutti gli argomenti trattati nel corso)

5 Problema del Controllo 5
6 Problema del Controllo 6 Imporre a certe variabili di processo o di sistema y(t) un andamento desiderato. Processo o Sistema: Oggetto su cui viene posto il problema del controllo Funzionamento Desiderato: Si desidera che alcune variabili di processo seguano un andamento temporale assegnato chiamato segnale di riferimento r(t) Variabile Controllata y(t) = Segnale di Riferimento r(t) Obbiettivo ideale del Controllo

7 Settori Applicativi dei Sistemi di Controlli Automatico 7

8 8

9 9

10 10

11 11

12 12
13 13

14 14

15 Esempio di azioni di controllo eseguite dall'uomo Controllo (manuale) di livello 15 r(t) Cervello Umano legge di controllo Occhio: Sensore di misura Misura dal sistema retroazione Feedback Segnale di controllo da controllare Trasformazione del segnale di comando nell azione di controllo attuatore h Il sistema di controllo Uomo in base alla misura visiva del livello di liquido decide di quanto aprire o di quanto chiudere il rubinetto. Lo scopo è quello di mantenere il livello del liquido ad un valore desiderato.
 t vdes () t")

16 Schematizzazione del controllo manuale di velocità di una vettura 16 vdes () t vdes () t et () vt () Algoritmo Di controllo RETROAZIONE Attuatore Sensore di misura Sistema da Controllare
17 Controllo Automatico 17 Controllo di un sistema:insieme delle azioni volte a far variare nel modo desiderato una grandezza Controllo Automatico: l azione di controllo è svolta da dispositivi capaci di sostituire l intervento umano Sistemi di Controllo Automatico: dispositivi (controllori, regolatori) mediante i quali si attua l azione di controllo (elettronici, software, meccanici, pneumatici.) Andamento Desiderato SITEMA DI CONTROLLO AUTOMATICO (CONTROLLORE) Azione di Controllo Misure dal Sistema Disturbi SISTEMA Variabile controllata
18 Fasi di progetto di un Controllo Automatico Andamento Desiderato SITEMA DI CONTROLLO AUTOMATICO (CONTROLLORE) Azione di Controllo Misure dal Sistema Disturbi SISTEMA Variabile controllata 18 Definizione Obbiettivi Specifiche di Progetto Analisi Sistema da Controllare Analisi Progetto Dispositivi di Controllo Sintesi
19 Specifiche di Progetto Obbiettivo PRATICO del progetto di un sistema di controllo: VARIABILE CONTROLLATA SEGNALE DI RIFERIMENTO K r( t) y ( t) y( t) d des K d =costante di regolazione La differenza viene quantificata definendo un segnale di errore e(t) 19 rt () e( t) y ( t) y( t) des Definizione di errore Andamento desiderato K d SISTEMA controllato () des t Il segnale e(t) si deve mantenere piccolo in tutte le condizioni operative y yt () et () per l uscita y(t).
20 Specifiche di Progetto SPECIFICHE: grandezze caratteristiche che riassumono in maniera sintetica e completa gli obbiettivi del progetto L ingegnere SISTEMISTA deve progettare un sistema di controllo in grado di soddisfare le specifiche. EX. Garantire che la risposta del sistema ad un segnale di riferimento a gradino sia confinata in una regione ammissibile, lo stesso deve valere per un disturbo a gradino. 20 Frontiera della regione ammissibile
21 y(t) Disturbo Classificazione Specifiche di Progetto Andamento tipico della risposta e dell errore y () des t e(t) specifiche Dinamiche specifiche Statiche 21 e ss e( t) y ( t) y( t) des 1) STABILITA DEL SISTEMA CONTROLLATO L'uscita deve rimanere comunque limitata, nei limiti di sicurezza di funzionamento del sistema Ingresso limitato - Uscita limitata Zero input stability
22 Classificazione Specifiche di Progetto 22 y(t) Disturbo y () des t e(t) specifiche Dinamiche specifiche Statiche e ss e( t) y ( t) y( t) des 2) FEDELTA DI RISPOSTA STATICA: e ss (t) In seguito alla variazione del Set-Point (Es: all'accensione dell'impianto) l'errore deve tendere a zero, oppure tendere ad un valore piccolo che può essere calcolato ed imposto dal sistema di controllo.
23 Classificazione Specifiche di Progetto 23 y(t) Disturbo y () des t e(t) specifiche Dinamiche specifiche Statiche 3) FEDELTA DI RISPOSTA DINAMICA: e(t) e ss e( t) y ( t) y( t) Alcuni parametri che caratterizzano la risposta durante il transitorio devono assumere dei valori di specifica assegnati (tipicamente si fa riferimento alla risposta al gradino ) TEMPO DI RISPOSTA SOVRAELONGAZIONE TEMPO DI ASSESTAMENTO des
24 Classificazione Specifiche di Progetto 24 y(t) Disturbo y () des t e(t) specifiche Dinamiche specifiche Statiche 4) REIEZIONE DEI DISTURBI Il sistema di controllo deve essere in grado di minimizzare l effetto dei disturbi. (Ex. Minimizzare l effetto del vento su una nave che deve navigare seguendo una ben definita direzione). Esistono disturbi Aleatori e disturbi Deterministici e ss e( t) y ( t) y( t) des
25 Classificazione Specifiche di Progetto 25 y(t) Disturbo y () des t e(t) specifiche Dinamiche specifiche Statiche 5) ROBUSTEZZA DELLE PRESTAZIONI: e ss e( t) y ( t) y( t) Il sistema di controllo deve essere in grado di garantire le prestazioni 1,2,3,4 anche nel caso in cui ci siano delle variazioni nella dinamica del processo (usura dei componenti,guasti parziali, ). Un sistema di controllo che garantisce queste proprietà si dice ROBUSTO des
26 Modelli Matematici di Sistemi (ruolo della modellistica matematica) 26 Per affrontare il problema di analisi e quindi di progetto del dispositivi di controllo automatico è necessario formulare il problema in termini matematici. A questo proposito è necessario: 1) Esprimere le specifiche di progetto in termini formali 2) Sviluppare una descrizione matematica del comportamento del sistema da controllare Modello Matematico del Sistema da Controllare
27 Modello Matematico del Sistema da Controllare 27 Un modello matematico di un sistema viene costruito sulla base delle leggi fisiche che regolano il rapporto di causa-effetto tra le variabili che descrivono il sistema Un modello matematico è quindi un rappresentazione più o meno fedele della realtà Grado di accuratezza del modello adeguato alle richieste del problema Sistemi molto diversi possono essere descritti da modelli matematici con struttura MATEMATICA simile ciò facilita la trattazione unitaria del problema del controllo Teoria del controllo automatico (AUTOMATICA)
28 Rappresentazione di un sistema con modello Linearizzato 28 Equazioni diff. Non lineari x( t) f ( x( t), u( t), t) y( t) g( x( t), u( t), t) Linearizzazione intorno ad un punto di lavoro (x 0,u 0 ) x( t) Ax( t) Bu( t) y( t) Cx( t) Du( t) Ps () 1 P( s) C( si A) B D a s... a m s b s b n1 n1 0 m1 m Trasformata di Laplace u(t) Schema a Blocchi u(t) f(x,u,t) P(s) y(t) y(t) Classi di Modelli Lineari u 1 (t) y 1 (t) SISO u 1 (t) u 2 (t) Sistema MIMO y 1 (t) y 2 (t)
29 Relazione tra f.d.t. e rappresentazione nello spazio degli stati 29 x( t) Ax( t) Bu( t) y( t) Cx( t) Du( t) sx ( s) x(0) AX ( s) BU ( s) Y ( s) CX ( s) DU ( s) 1 1 Y ( s) C( si A) x(0) C( si A) B D U( s) Risposta Libera Risposta Forzata G( s) C( si A) 1 B D indipendente dalla particolare forma di stato utilizzata
30 u () t 1 u () t 2 u () n t Modelli Matematici: (schematizzazione) SISTEMA DA CONTROLLARE x ( t) x ( t) x ( t) 1 2 p y () t y 1 2 () t y () m t 30 d ( t) d ( t) d ( t) 1 2 [ u 1 (t), u 2 (t),..., u n (t)] = Variabili manipolabili (Ingressi o Cause). Tali variabili sono imposte dal sistema di controllo [ x 1 (t), x 2 (t),..., x p (t)] = Variabili di Stato del modello del sistema [ y 1 (t), y 2 (t),..., y m (t)] = Variabili di Uscita (effetti), alcune sono misurate [ d 1 (t), d 2 (t),..., d s (t)] =Variabili non Manipolabili (Disturbi) che agiscono indipendentemente in funzione di cause esterne (non desiderate) s
31 32 STRUTTURE BASE DEI SISTEMI DI CONTROLLO
32 33 La classificazione è fatta in base alle INFORMAZIONI di cui dispone il CONTROLLORE durante il funzionamento Controllo in ANELLO APERTO o ad azione diretta d(t) Disturbo Variabile di Riferimento Variabile di Controllo Variabile Controllata r(t) CONTROLLORE u(t) SISTEMA y(t) CARATTERISTICHE PRINCIPALI Il controllore utilizza solo informazioni sul segnale di riferimento r(t) e disturbo d(t) (se misurabile) per generare il segnale di comando u(t). Tale strategia quindi non utilizza alcuna misura di variabili di sistema ( non c è feedback dal sistema)
33 Controllo in ANELLO APERTO o ad azione diretta 34 d(t) Disturbo Variabile di Riferimento r(t) CONTROLLORE CARATTERISTICHE PRINCIPALI Variabile di Controllo u(t) SISTEMA Variabile Controllata y(t) Tale strategia è detto anche Controllo Predittivo o Controllo in Avanti o feedforward Sensibile ai Disturbi non misurabili (non si accorge dei disturbi ) Molto sensibile alle variazioni dei parametri (non si accorge di eventuali variazioni che si possono verificare sui parametri del sistema Vantaggio: è richiesta poca Strumentazione

34 Schema Generale di un sistema di Controllo in anello aperto 35
35 38 Controllo in ANELLO CHIUSO o in RETROZIONE (feedback) Disturbo r(t) + e(t) - CONTROLLORE u(t) SISTEMA y(t) CARATTERISTICHE PRINCIPALI Il Controllore utilizza non solo il segnale di riferimento r(t) ma anche la VARIABILE CONTROLLATA y(t) per calcolare la variabile di controllo u(t) Tale strategia di controllo è chiamata esplorativa Il controllore vede i disturbi in seguito al loro effetto sull uscita y(t) Il controllore vede eventuali var. parametriche in seguito al loro effetto sulla var. di uscita y(t)
36 Controllo in RETROAZINE CON COMPENSAZIONE DEI DISTURBI 39 Compensatore Disturbo u 2 (t) r(t) + - e(t) Controllore u 1 (t) + SISTEMA y(t) CARATTERISTICHE PRINCIPALI Nel caso in cui la variabile di disturbo sia MISURABILE si può aggiungere al controllore in retroazione un regolatore feedforward che COMPENSA l effetto del disturbo.
37 r(t) + Controllo in RETROAZINE+FEEDFORWARD CONTROLLER FEEDFORWARD CONTROLLER FEEDBACK r(t) - e(t) u 1 (t) azione in avanti d(t) u 2 (t) SISTEMA y(t) 40 retroazione CARATTERISTICHE PRINCIPALI E presente nel contempo sia una azione di controllo in feedback sia feedforward Presenta i vantaggi di entrambe le strategie ma è più complessa la progettazione dei controllori
38 Esempio di Controllo in Retroazione Regolazione automatica della velocità di una vettura (moto rettilineo) X 41 Si applica una legge di controllo PROPORZIONALE: la forza erogata dal dispositivo di controllo/attuazione automatico deve essere proporzionale all errore di Velocità F mot k v des v E necessario determinare il legame tra le forze che agiscono sulla vettura ma F F... F 1 2 n ma b v F F F mot percorso vento...
39 Comportamento della vettura controllata 42 F mot k v des v E interessante analizzare il comportamento a regime, cioè quando la vettura viaggia ad una velocità costante. Se la velocità è costante allora l accelerazione è uguale a zero: v des percorso ve t ma b v k v F F Equazione della dinamica controllata a 0 0 b v k v v F F des percorso vento no
40 0 b v k v v F F des percorso vento 43 ( k b) v k v F F des percorso vento E ora possibile analizzare quale è la relazione tra la velocità desiderata e la velocità effettiva a regime: v ss k k b v des F percorso kb F vento Al crescere del valore del guadagno k si nota: La velocità della vettura a regime tende al valore desiderato L'effetto dei disturbi e delle variazioni dei parametri è attenuato Tale comportamento favorevole è indipendente dai valori di m
41 Schema a blocchi del sistema di controllo della velocità u mot k v des v Disturbo deterministico 44 vdes e k u mot v Sensore di velocità Rumore di misura Parametri di simulazione m=1, b= K=1 v d e s (t) v(t) v d e s (t) v(t) K= effetto del distrurbo effetto del distrurbo
42 Sistema di controllo ANALOGICO completo di Strumentazione rt () Trasduttore segnale riferimento segnale di Riferimento Compensatore disturbo Misura del disturbo Trasduttore di disturbo Disturbo di processo dt () Misura segnale di Riferimento Errore CONTROLLORE FEEDBACK + Variabile uscita misurata + ut () Variabile di controllo Trasduttore di Misura Attuatore mt () Variabile manipolabile C è un Attuatore per ogni variabile di controllo C è un Trasduttore per ogni variabile misurata Processo Variabile controllata yt ()
43 Blocchi costitutivi un regolatore per controllo in retroazione vdes Regolatore e Rs () m v 49 v mis Regolatore v des elaborazione analogica segnale di errore Amplificatore Potenza Attuatore m v mis Sorgente Alimentazione Primaria
44 Sistema di controllo DIGITALE completo di Strumentazione 50 segnale di Riferimento ut () Sistema tempo discreto mt () e( kt ) u( kt ) A/D Calcolat. Digitale u( kt ) D/A ut () Attuat. mt () Processo Variabile controllata Clock (T) Trasduttore di Misura
45 51 CALCOLO DI F.D.T. di SISTEMI DI CONTROLLO ELEMENTARI
46 Schema a blocchi di un sistema controllato 52 N D U E R P Y H R= Guad. Regolatore P= Guad. Processo H= Guad. Trasduttore U= Segnale di Ingresso E=Segnale di errore Y=segnale di Uscita D=Disturbo N =Rumore di misura
47 Legame tra ingresso U ed uscita Y U E N R P D Y 53 Si suppone N=D=0 Y RPE E U HY H Y RP( U HY ) Y(1 RPH ) RPU Y RP 1 RPH U La f.d.t del sistema in retroazione ha come: NUMERATORE il prodotto delle f.d.t del ramo diretto DENOMINATORE 1 il prodotto delle f.d.t presenti nell anello di retroazione (il segno a denominatore dipende dal segno della retroazione)
48 Legame tra Disturbo D ed uscita Y U E N R P D Y 54 Si suppone U=N=0 H Y RPE D E HY Y 1 RPH D Y RPHY D 1 Y(1 RPH ) D
49 Legame tra Rumore di Misura N e uscita Y U E N R P D Y 55 Si suppone U=D=0 H Y RP( E N) RP E HY Y RPH N 1 Y RP( HY N) Y(1 RPH ) RPN
50 Legame tra Rumore di Misura N e uscita Y 56 U E R P D Y H N Si suppone U=D=0 RPH Y N 1 RPH
51 Confronto tra Funzioni di interesse per il sistema in retroazione U E N R P D Y 57 Si suppone che H sia circa uguale ad 1, cioè è accettabile nel caso in cui H sia un trasduttore 1 Y RP RP U Legame tra ingresso e uscita Y 1 RP D Legame tra disturbo e uscita 1 Y 1 RP N Legame tra rumore e uscita RP
52 Cenni Analisi Armonica 58
53 59
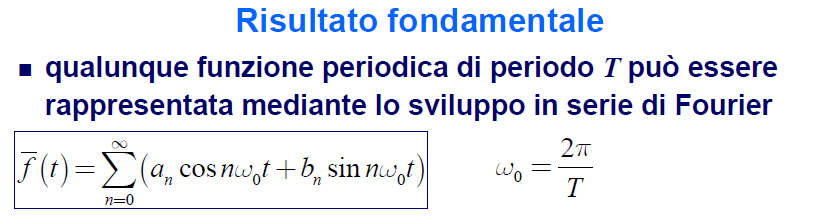

54 60
55 I coefficienti a0 ed rn e jn si possono calcolare in modo esplicito risolvendo delle opportune formule basate su integrali dipendenti dalla funzione periodica f(t) 61



56

57 T 2 k k 0 T 2sec

58 64

59 65
60 66
61 RISPOSTA ARMONICA 67

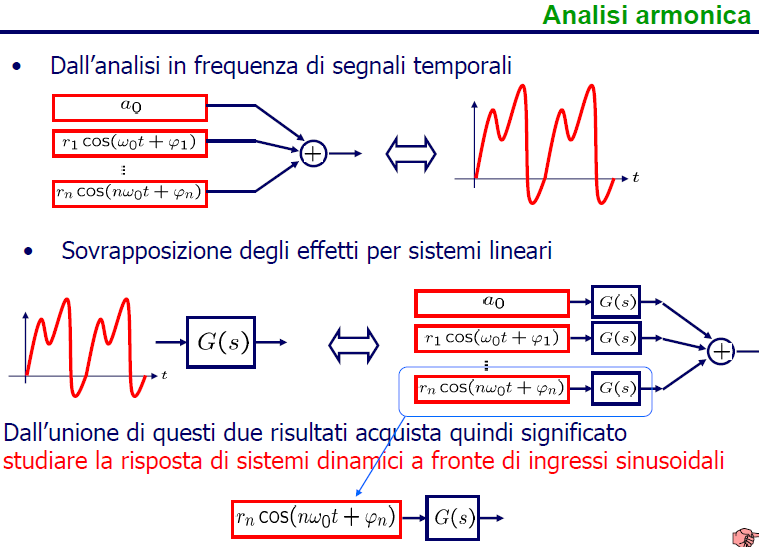
62 68 Risposta di un sistema a segnali Sinusoidali
63 Risposta di un sistema a segnali sinusoidali Come è fatta la risposta a regime di un Sistema Lineare G(s) (asintoticamente stabile) comandato con ingresso sinusoidale? 69 fase Risposta a regime
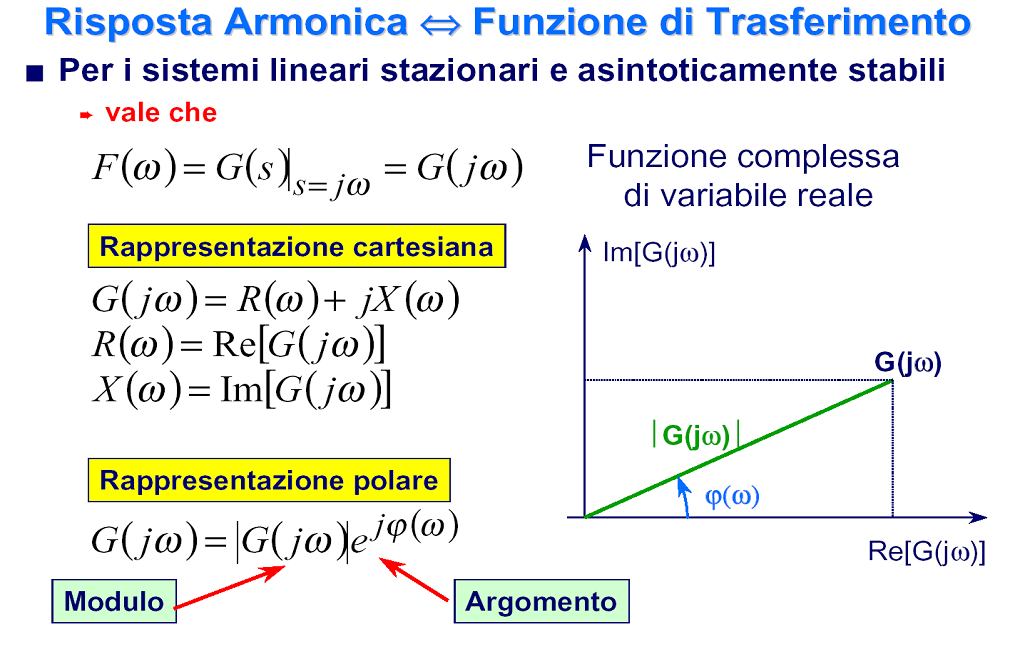
64 La Funzione di Risposta Armonica E una funzione in campo complesso F() di variabile reale. Questa descrive l uscita a regime di un sistema lineare sollecitato con ingresso sinusoidale di ampiezza unitaria e pulsazione variabile da 0 ad. u( t) X sin t Gs () y( t) Y ( )sin t j( ) Esaurito il transitorio, anche l uscita y(t) varia con legge sinusoidale, caratterizzata dalla stessa pulsazione. L ampiezza Y() e l angolo di fase j sono funzioni della pulsazione di ingresso. Vale quindi: Definizione di Risposta Armonica 70 MODULO di F() : Y( )/ X FASE di F() : j ( ) F( ) F( ) e j F ( )
65 TEOREMA: (regime sinusoidale di sistemi lineari stazionari) Un sistema lineare stazionario G(s) con poli a parte reale negativa soggetto ad eccitazione sinusoidale presenta, a regime, una risposta avente la stessa frequenza dell eccitazione. La risposta armonica F() è legata alla funzione di trasferimento G(s) dalla relazione: 71 F ( ) Gs) ( G( j) s j u( t) X sint y( t) Y ( )sin t ( ) j Gs () y( t) X G( j) sin t j ( j) G
66 TEOREMA: (regime sinusoidale di sistemi lineari stazionari) 72 F( ) G( s) G( j) s j DIM. Gs () a a s... a s o 1 1 b b s... b s o n m n m u( t) X sin( t) U () s X s 2 2 Evoluzione forzata del sistema ( a partire da condizioni iniziali nulle) Ys () Y ( s) G( s) ao a s... a s b s o X n 1 n m 2 b1 s... bms s 2 2 X X G( s) ( s j) ( s 2 j )
67 L evoluzione forzata del sistema contiene sia i modi propri del sistema G(s) sia quelli dell ingresso. Ciò si evidenzia sviluppando Y(s) in frazioni parziali. Nel caso particolare di poli semplici si ha: Ys () Ns () X ( s p )( s p )...( s p ) ( s j)( s j) 1 2 m 73 Ys ( ) at 1 L e s a m K * A A i 1 1 s j ( s i1 i ( s p ) ( ) j) m i1 * i 1 1 y() t K e i A e A e pt j t jt Modi dovuti al sistema Modo dovuto all ingresso
68 m i1 Comportamento a Regime: Per ipotese il sistema è asintoticamente stabile (tutti i poli di G(s) hanno parte reale negativa) quindi la corrispondente porzione della risposta tende a zero. La risposta a regime contiene quindi solo il modo dovuto all ingresso sinusoidale j t * 1 1 y () t Ae A e PERMANENTE * i 1 1 y() t K e i A e A e Y( s) G( s) X A G( j) 1 2 j pt j t jt ( s j X )( s j ) X * A G( j) 1 2 j jt 74
69 X 1 X 1 y perm( s) G( j) G( j) 2 j ( s j) 2 j ( s j) 75 X y ( s) G e jjge jt G e jjge perm 2 j jt y ( t) X G sen( t j ) perm Calcolando i residui e ricombinando le esponenziali si è quindi dimostrato che y ( t) X G( j) sen t j ( ) perm G G Per confronto, dalla definizione di F(), si ha: F ( ) G( j)
70
71 Determinazione sperimentale della risposta armonica F( ) G( j ) G( j ) e jj( ) 77 si applica all ingresso una sinusoide di ampiezza unitaria e frequenza molto bassa 1) si aspetta che il sistema esaurisca il transitorio 2) si registrano l ampiezza e lo sfasamento dell uscita 3) si torna al punto 1 con una frequenza più elevata 4) ci si ferma quando l ampiezza dell uscita è trascurabile 5) si graficano separatamente per i diversi valori di : I valori delle ampiezze alle varie frequenze forniscono G( j ) I valori delle fasi alle varie frequenze forniscono G( j ) j( )
72 fase(gradi) modulo Gs () Esempio: Calcolo analitico della risposta armonica s 2 s 4 0.4s4 G( j ) j 4 4 j j j j 2 2 ( ) j j ( ) j(2.4 ) G( j) j0.4 4 j0.4 (4 ) 0.16 RAPPRESENTAZIONE CARTESIANA 2 ( ) Re G( j ) ; (4 ) 0.16 Im G( j ) 3 (2.4 ) (4 ) 0.16 RAPPRESENTAZIONE POLARE rad/sec G( j ) Re G( j ) Im G( j ) ; G( j ) atan Im G( j ) / Re G( j ) E conveniente rappresentare l asse delle frequenze su scala logaritmica 0.1<w< rad/sec
73 r( t) y ( t) sen( t) 0.01; 0.1; d y 1 sen(0.01 t) y sen(0.01t ) y sen(0.1 t) d d y sen(0.1t 0.8 ) Calcolo della risposta a regime rt () s s 4 0.4s4 y( t) G( j ) sen( t G( j )) Modulo 79 1; y 2; yd sen(1 t) sen(1t 6.4 ) y sen(2 t) d y sen(2t ) 10; y sen(10 t) d y sen(10t ) 100; y sen(100 t) d y sen(100t ) rad/sec Fase (gradi) rad/sec La risposta a regime del sistema è una copia fedele del segnale d ingresso nella banda di frequenze in cui G(iw) 1 ed arg(g(jw)) 0
74 Banda passante La frequenza che determina la banda passante B è definita come quella frequenza per la quale il modulo di G(jw) (di tipo passa basso) scende al 70.7% del valore che la G(jw) assume a frequenza zero G(j0) Picco di risonanza G( j B) 1 B G( j0) 2 B 2 G( j ) 1 2 G( j0) 2 1 w B w rad/sec Banda passante B 0 B ( ) (2.4 ) (4 ) 0.16 (4 ) B rad/sec
75 Impiego della risposata armonica per il calcolo della risposta a regime di un sistema con ingresso composto da più sinusoidi 2500 r( t) 3 sen(10 t) sin(50 t) yt ( )... 2 ( s 50) W () s 2500 ( s 50) 2 2 Il sistema è asintoticamente stabile quindi esiste la risposta a regime sinusoidale e ; te 50t 50t 81 Modi propri del sistema Sfruttando le proprietà della risposta armonica si ha la seguente risposta a regime: y( t) 3 W (10) sin 10 t W (10) W (50) sin 50 t W (50) 2 2
76 Phase (deg) Magnitude (db) M db 20log ( M) log (1) Bode Diagram 20 20log (10) log (10 ) log (0.1) log (10 ) 3 20log (0.707) Frequency (rad/sec)
77 Phase (deg) Magnitude (db) y( t) 3 W (10) sin 10 t W (10) W (50) sin 50 t W (50) 2 2 Bode Diagram 0 W W 2 2 ( j10) ; ( j50) M db 20log ( M) 10 W W 2 2 ( j10) ( j50) Frequency (rad/sec)
78 y( t) 3 W (10) sin 10 t W (10) W (50) sin 50 t W (50) W W 2 2 W W (10) ; (50) ( j10) ( j50) -90 Si riscontra una alterazione della forma d onda d uscita rispetto a quella d ingresso dovute alle diverse proprietà filtranti della W 2 (s) nei riguardi delle due componenti sinusoidali di diversa pulsazione SEGNALE D'INGRESSO U(t) W () s 2 2 SEGNALE D'USCITA y(t) 2500 ( s 50)
79 INGRESSO Influenza della Banda passante sulla risposta 85 USCITA AL VARIARE DELLA BANDA PASSANTE DEL SISTEMA 1 0 B 3 = 1 RAD/SEC B 3 = 5 RAD/SEC B 3 = 10 RAD/SEC B 3 = 50 RAD/SEC sec 0 B 3 = 100 RAD/SEC
80 Proprietà filtranti di una FDT H(s) H(jw) U1(jw) U2(jw) U3(jw) U-tot=U1+U2+U U- tot uscita
CONTROLLI AUTOMATICI Ingegneria Gestionale ANALISI ARMONICA
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
ANALISI ARMONICA. G(s) Analisi armonica. Funzione di risposta armonica
 Analisi armonica. Funzione di risposta armonica") CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Analisi
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI ARMONICA Analisi
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Federica
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Federica
08. Analisi armonica. Controlli Automatici
 8. Analisi armonica Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Alessio Levratti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
8. Analisi armonica Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Alessio Levratti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
Introduzione al Corso
 Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Introduzione -
Introduzione - 1 Corso di Laurea in Ingegneria Meccanica Introduzione al Corso DEIS-Università di Bologna Tel. 051 2093020 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Introduzione -
Banda passante e sviluppo in serie di Fourier
 CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html Banda passante e sviluppo in serie di Fourier Ing. e-mail: luigi.biagiotti@unimore.it
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html Banda passante e sviluppo in serie di Fourier Ing. e-mail: luigi.biagiotti@unimore.it
Esercizi di Controlli Automatici
 Esercizi di Controlli Automatici L. Magni Esercizio Si studi la stabilità dei seguenti sistemi retroazionati negativamente con guadagno d anello L(s) al variare di > utilizzando il luogo delle radici e
Esercizi di Controlli Automatici L. Magni Esercizio Si studi la stabilità dei seguenti sistemi retroazionati negativamente con guadagno d anello L(s) al variare di > utilizzando il luogo delle radici e
06. Analisi Armonica. Controlli Automatici. Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti
 Controlli Automatici 6. Analisi Armonica Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
Controlli Automatici 6. Analisi Armonica Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it http://www.arscontrol.org/teaching
Margini di stabilità. Corso di Laurea in Ingegneria Meccanica Controlli Automatici L
 Margini distabilità - 1 Corso di Laurea in Ingegneria Meccanica Margini di stabilità DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Schema a blocchi
Margini distabilità - 1 Corso di Laurea in Ingegneria Meccanica Margini di stabilità DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Schema a blocchi
PIANO DI LAVORO DEI DOCENTI
 Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Indice Prefazione Problemi e sistemi di controllo Sistemi dinamici a tempo continuo
 Indice Prefazione XI 1 Problemi e sistemi di controllo 1 1.1 Introduzione 1 1.2 Problemi di controllo 2 1.2.1 Definizioni ed elementi costitutivi 2 1.2.2 Alcuni esempi 3 1.3 Sistemi di controllo 4 1.3.1
Indice Prefazione XI 1 Problemi e sistemi di controllo 1 1.1 Introduzione 1 1.2 Problemi di controllo 2 1.2.1 Definizioni ed elementi costitutivi 2 1.2.2 Alcuni esempi 3 1.3 Sistemi di controllo 4 1.3.1
Corso di laurea in Informatica. Regolatori. Marta Capiluppi Dipartimento di Informatica Università di Verona
 Corso di laurea in Informatica Regolatori Marta Capiluppi marta.capiluppi@univr.it Dipartimento di Informatica Università di Verona Scelta delle specifiche 1. Picco di risonanza e massima sovraelongazione
Corso di laurea in Informatica Regolatori Marta Capiluppi marta.capiluppi@univr.it Dipartimento di Informatica Università di Verona Scelta delle specifiche 1. Picco di risonanza e massima sovraelongazione
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo. RETI CORRETTRICI
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html RETI CORRETTRICI Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html RETI CORRETTRICI Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Relazione tra specifiche e proprietà di L(s) Nell analisi dei sistemi in retroazione
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Relazione tra specifiche e proprietà di L(s) Nell analisi dei sistemi in retroazione
Oggetto del Corso. Sistema di controllo. Fondamenti di Automatica
 Parte 1, 1 Parte 1, 2 ESAMI Solo prova scritta Prove parziali (facoltative ma consigliate ) Iscrizione elettronica (http://studenti.units.it) CORSI A MONTE Analisi I e II Geometria DEEI-Università di Trieste
Parte 1, 1 Parte 1, 2 ESAMI Solo prova scritta Prove parziali (facoltative ma consigliate ) Iscrizione elettronica (http://studenti.units.it) CORSI A MONTE Analisi I e II Geometria DEEI-Università di Trieste
Lezione 7. Requisiti di un sistema di controllo
 Lezione 7 Requisiti di un sistema di controllo Componenti di uno schema di controllo Esaurita la trattazione dei sistemi dinamici, si torna ora al problema di controllo, che aveva dato origine a tale studio.
Lezione 7 Requisiti di un sistema di controllo Componenti di uno schema di controllo Esaurita la trattazione dei sistemi dinamici, si torna ora al problema di controllo, che aveva dato origine a tale studio.
ANALISI ARMONICA. G(s) Analisi armonica. Funzione di risposta armonica. CONTROLLI AUTOMATICI Ingegneria Meccatronica
 Analisi armonica. Funzione di risposta armonica. CONTROLLI AUTOMATICI Ingegneria Meccatronica") CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/automazione%2industriale.htm ANALISI ARMONICA Analisi armonica di sistemi dinamici Analisi nel dominio del
CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/automazione%2industriale.htm ANALISI ARMONICA Analisi armonica di sistemi dinamici Analisi nel dominio del
Automatica. Prof. Giancarlo Ferrari Trecate. Dipartimento di Informatica e Sistemistica Università degli Studi di Pavia
 Automatica Prof. Giancarlo Ferrari Trecate Dipartimento di Informatica e Sistemistica Università degli Studi di Pavia giancarlo.ferrari@unipv.it Informazioni utili Orario lezioni: Mercoledì: 16 18 (aula
Automatica Prof. Giancarlo Ferrari Trecate Dipartimento di Informatica e Sistemistica Università degli Studi di Pavia giancarlo.ferrari@unipv.it Informazioni utili Orario lezioni: Mercoledì: 16 18 (aula
Controlli Automatici I
 Ingegneria Elettrica Politecnico di Torino Luca Carlone Controlli Automatici I LEZIONE V Sommario LEZIONE V Proprietà strutturali Controllabilità e raggiungibilità Raggiungibilità nei sistemi lineari Forma
Ingegneria Elettrica Politecnico di Torino Luca Carlone Controlli Automatici I LEZIONE V Sommario LEZIONE V Proprietà strutturali Controllabilità e raggiungibilità Raggiungibilità nei sistemi lineari Forma
CONTROLLI AUTOMATICI Ingegneria Meccatronica
 ) CONTROLLI AUTOMATICI Ingegneria Meccatronica ANALISI ARMONICA Prof. Cesare Fantuzzi Ing. Cristian Secchi e-mail: cesare.fantuzzi@unimore.it, cristian.secchi@unimore.it http://www.automazione.ingre.unimore.it
) CONTROLLI AUTOMATICI Ingegneria Meccatronica ANALISI ARMONICA Prof. Cesare Fantuzzi Ing. Cristian Secchi e-mail: cesare.fantuzzi@unimore.it, cristian.secchi@unimore.it http://www.automazione.ingre.unimore.it
Risposta a regime (per ingresso costante e per ingresso sinusoidale)
") Risposta a regime (per ingresso costante e per ingresso sinusoidale) Esercizio 1 (es. 1 del Tema d esame del 18-9-00) s + 3) 10 ( s + 1)( s + 4s ) della risposta all ingresso u ( a gradino unitario. Non
Risposta a regime (per ingresso costante e per ingresso sinusoidale) Esercizio 1 (es. 1 del Tema d esame del 18-9-00) s + 3) 10 ( s + 1)( s + 4s ) della risposta all ingresso u ( a gradino unitario. Non
5. Per ω = 1/τ il diagramma reale di Bode delle ampiezze della funzione G(jω) =
 =") Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO. Schema generale di controllo in retroazione
 ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
REGOLATORI PID. Modello dei regolatori PID. Metodi di taratura automatica
 REGOLATORI PID Modello dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI PID Larga diffusione in ambito
REGOLATORI PID Modello dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI PID Larga diffusione in ambito
REGOLATORI STANDARD PID + _ +
 CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/automazione%2industriale.htm Regolatori standard Regolatore Proporzionale, Integrale, Derivativo PID tre
CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/automazione%2industriale.htm Regolatori standard Regolatore Proporzionale, Integrale, Derivativo PID tre
Analisi dei sistemi in retroazione
 Facoltà di Ingegneria di Reggio Emilia Corso di Controlli Automatici Corsi di laurea in Ingegneria Meccatronica ed in Ingegneria della Gestione Industriale Ing. Alessandro Macchelli e-mail: amacchelli@deis.unibo.it
Facoltà di Ingegneria di Reggio Emilia Corso di Controlli Automatici Corsi di laurea in Ingegneria Meccatronica ed in Ingegneria della Gestione Industriale Ing. Alessandro Macchelli e-mail: amacchelli@deis.unibo.it
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
Fondamenti di Automatica. Feedback vs Feedforward. Prof. Leonardo Lanari DIS, Università di Roma La Sapienza
 Fondamenti di Automatica Feedback vs Feedforward Prof. Leonardo Lanari DIS, Università di Roma La Sapienza Problema di controllo Problema di controllo: imporre un funzionamento desiderato a un processo
Fondamenti di Automatica Feedback vs Feedforward Prof. Leonardo Lanari DIS, Università di Roma La Sapienza Problema di controllo Problema di controllo: imporre un funzionamento desiderato a un processo
Sistemi di Controllo Esempio di domande teoriche a risposta multipla. Esempio di problemi e quesiti a risposta aperta
 Sistemi di Controllo Esempio di domande teoriche a risposta multipla Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte
Sistemi di Controllo Esempio di domande teoriche a risposta multipla Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte
RETI CORRETTRICI. Regolatori standard Alcune strutture standard di regolatori reti correttrici anticipo o ritardo 1 polo ed uno zero reali
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Luigi
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Luigi
SISTEMI ELEMENTARI DEL 1 o E 2 o ORDINE
 CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html SISTEMI ELEMENTARI DEL 1 o E 2 o ORDINE Ing. e-mail: luigi.biagiotti@unimore.it
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html SISTEMI ELEMENTARI DEL 1 o E 2 o ORDINE Ing. e-mail: luigi.biagiotti@unimore.it
STABILITÀ DEI SISTEMI Metodo di Bode e Nyquist
 I.T.I. Modesto PANETTI B A R I Via Re David, 186-70125 BARI 080-542.54.12 - Fax 080-542.64.32 Internet http://www.itispanetti.it email : BATF05000C@istruzione.it INTRODUZIONE STABILITÀ DEI SISTEMI Metodo
I.T.I. Modesto PANETTI B A R I Via Re David, 186-70125 BARI 080-542.54.12 - Fax 080-542.64.32 Internet http://www.itispanetti.it email : BATF05000C@istruzione.it INTRODUZIONE STABILITÀ DEI SISTEMI Metodo
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO. Schema generale di controllo in retroazione. Margine di guadagno e margine di fase
 ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
ANALISI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Schema generale di controllo in retroazione Requisiti di un sistema di controllo Stabilità in condizioni nominali Margine di guadagno e margine di fase
Programma svolto di Elettrotecnica e Laboratorio. Modulo n 1/ Argomento: Studio di reti in corrente continua. Modulo n 2/ Argomento: Elettrostatica
 Programma svolto di Elettrotecnica e Laboratorio Classe III sez. A Istituto Tecnico dei Trasporti e Logistica Colombo di Camogli tensione. Generatore di corrente. Diagramma tensione-corrente. Resistività.
Programma svolto di Elettrotecnica e Laboratorio Classe III sez. A Istituto Tecnico dei Trasporti e Logistica Colombo di Camogli tensione. Generatore di corrente. Diagramma tensione-corrente. Resistività.
Sintesi diretta. (Complementi di Controlli Automatici: prof. Giuseppe Fusco)
") Sintesi diretta (Complementi di Controlli Automatici: prof. Giuseppe Fusco) La tecnica di progetto denominata sintesi diretta ha come obiettivo il progetto di un controllore C(s) il quale assicuri che
Sintesi diretta (Complementi di Controlli Automatici: prof. Giuseppe Fusco) La tecnica di progetto denominata sintesi diretta ha come obiettivo il progetto di un controllore C(s) il quale assicuri che
SISTEMI DI CONTROLLO TIPI DI CONTROLLO
 1 SISTEMI DI CONTROLLO OBIETTIVI Comprendere il concetto di controllo automatico Comprendere la differenza tra controllo ad anello aperto e ad anello chiuso Acquisire gli strumenti matematici per l analisi
1 SISTEMI DI CONTROLLO OBIETTIVI Comprendere il concetto di controllo automatico Comprendere la differenza tra controllo ad anello aperto e ad anello chiuso Acquisire gli strumenti matematici per l analisi
PROGRAMMA DEL DÌ AUTOMATICI
 MINISTERO DELL ISTRUZIONE DELL UNIVERSITA E DELLA RICERCA UFFICIO SCOLASTICO REGIONALE DEL LAZIO I.I.S.S. VIA SILVESTRI,301 Distretto 24 Municipio XVI - Cod. Mec. RMIS10800g Cod. Fisc. 97804460588 Email:
MINISTERO DELL ISTRUZIONE DELL UNIVERSITA E DELLA RICERCA UFFICIO SCOLASTICO REGIONALE DEL LAZIO I.I.S.S. VIA SILVESTRI,301 Distretto 24 Municipio XVI - Cod. Mec. RMIS10800g Cod. Fisc. 97804460588 Email:
Risposta a segnali dotati di serie o trasformata di Fourier. Identificazione della risposta in frequenza. Azione filtrante dei sistemi dinamici
 RISPOSTA IN FREQUENZA Risposta esponenziale Risposta sinusoidale Risposta a segnali dotati di serie o trasformata di Fourier Identificazione della risposta in frequenza Diagrammi di Bode Diagrammi polari
RISPOSTA IN FREQUENZA Risposta esponenziale Risposta sinusoidale Risposta a segnali dotati di serie o trasformata di Fourier Identificazione della risposta in frequenza Diagrammi di Bode Diagrammi polari
ANALISI DEI SISTEMI IN RETROAZIONE E FUNZIONI DI SENSITIVITA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html ANALISI DEI SISTEMI IN RETROAZIONE E FUNZIONI DI SENSITIVITA Schema di riferimento
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html ANALISI DEI SISTEMI IN RETROAZIONE E FUNZIONI DI SENSITIVITA Schema di riferimento
ANALISI ARMONICA FUNZIONE DI RISPOSTA ARMONICA
 ANALISI ARMONICA I procedimenti per la soluzione delle equazioni differenziali lineari e tempoinvarianti, basati in particolare sulla trasformazione di Laplace, hanno come obiettivo la deduzione della
ANALISI ARMONICA I procedimenti per la soluzione delle equazioni differenziali lineari e tempoinvarianti, basati in particolare sulla trasformazione di Laplace, hanno come obiettivo la deduzione della
s + 6 s 3, b) i valori di K per i quali il sistema a ciclo chiuso risulta asintoticamente stabile;
 i valori di K per i quali il sistema a ciclo chiuso risulta asintoticamente stabile;") 1 Esercizi svolti Esercizio 1. Con riferimento al sistema di figura, calcolare: ut) + K s s + 6 s 3 yt) a) la funzione di trasferimento a ciclo chiuso tra ut) e yt); b) i valori di K per i quali il sistema
1 Esercizi svolti Esercizio 1. Con riferimento al sistema di figura, calcolare: ut) + K s s + 6 s 3 yt) a) la funzione di trasferimento a ciclo chiuso tra ut) e yt); b) i valori di K per i quali il sistema
Progetto del controllore
 Parte 10, 1 - Problema di progetto Parte 10, 2 Progetto del controllore Il caso dei sistemi LTI a tempo continuo Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Parte 10, 1 - Problema di progetto Parte 10, 2 Progetto del controllore Il caso dei sistemi LTI a tempo continuo Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Presentazione del corso
 FACOLTÁ DI INGEGNERIA CORSO DI LAUREA in Ingegneria Gestionale Classe L/9 Insegnamento di Fondamenti di Automatica 9 C.F.U. A.A. 2015-2016 Docente: Prof. Massimo Cefalo E-mail: massimo.cefalo@unicusano.it
FACOLTÁ DI INGEGNERIA CORSO DI LAUREA in Ingegneria Gestionale Classe L/9 Insegnamento di Fondamenti di Automatica 9 C.F.U. A.A. 2015-2016 Docente: Prof. Massimo Cefalo E-mail: massimo.cefalo@unicusano.it
2a(L) Sia dato un processo P(s) descrivibile mediante la funzione di trasferimento:
 Sia dato un processo P(s) descrivibile mediante la funzione di trasferimento:") Esame di Fondamenti di Automatica Corsi di Laurea in Elettronica, Meccanica, Diploma di Elettronica giugno (L+D) Il sistema in figura è composto da un motore in c.c. controllato in corrente (inerzia Jm
Esame di Fondamenti di Automatica Corsi di Laurea in Elettronica, Meccanica, Diploma di Elettronica giugno (L+D) Il sistema in figura è composto da un motore in c.c. controllato in corrente (inerzia Jm
CONTROLLI AUTOMATICI Ingegneria Gestionale LUOGO DELLE RADICI
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm LUOGO DELLE RADICI Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm LUOGO DELLE RADICI Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
LA RISPOSTA ARMONICA DEI SISTEMI LINEARI (regime sinusoidale) S o (t)
 S o (t)") ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INF LA RISPOSTA ARMONICA DEI SISTEMI LINEARI (regime sinusoidale) S i (t) Sistema LINEARE S o (t) Quando si considerano i sistemi lineari, per essi è applicabile
ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INF LA RISPOSTA ARMONICA DEI SISTEMI LINEARI (regime sinusoidale) S i (t) Sistema LINEARE S o (t) Quando si considerano i sistemi lineari, per essi è applicabile
Esercizi per il corso di Fondamenti di Automatica I
 Esercizi per il corso di Fondamenti di Automatica I Ing. Elettronica N.O. Docente: Dott. Ing. Luca De Cicco 2 Febbraio 2009 Exercise. Si determini la trasformata di Laplace dei segnali: x (t) = cos(ωt
Esercizi per il corso di Fondamenti di Automatica I Ing. Elettronica N.O. Docente: Dott. Ing. Luca De Cicco 2 Febbraio 2009 Exercise. Si determini la trasformata di Laplace dei segnali: x (t) = cos(ωt
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Controlli e Regolazione Automatica Prova scritta del 26 maggio 2005
 Controlli e Regolazione Automatica Prova scritta del 26 maggio 2005 Domanda Disegnare lo schema a blocchi di un sistema di controllo in retroazione, descrivendo sinteticamente il ruolo di tutti i suoi
Controlli e Regolazione Automatica Prova scritta del 26 maggio 2005 Domanda Disegnare lo schema a blocchi di un sistema di controllo in retroazione, descrivendo sinteticamente il ruolo di tutti i suoi
Controllo a retroazione
 E il tipo di controllo più antico. Q, T i SHT: la temperatura in uscita può variare perché vogliamo cambiare il set point o per effetto di disturbi Controllo di tipo servomeccanismo Controllo regolativo
E il tipo di controllo più antico. Q, T i SHT: la temperatura in uscita può variare perché vogliamo cambiare il set point o per effetto di disturbi Controllo di tipo servomeccanismo Controllo regolativo
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo.
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Banda passante e sviluppo in serie di Fourier Ing. Luigi Biagiotti e-mail:
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Banda passante e sviluppo in serie di Fourier Ing. Luigi Biagiotti e-mail:
Fondamenti di Controlli Automatici
 Cognome: Nome: N. Matr.: Fondamenti di Controlli Automatici Ingegneria Meccanica Compito del 11 settembre 215 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono
Cognome: Nome: N. Matr.: Fondamenti di Controlli Automatici Ingegneria Meccanica Compito del 11 settembre 215 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono
Risposta temporale: esempi
 ...4 Risposta temporale: esempi Esempio. Calcolare la risposta al gradino unitario del seguente sistema: x(t) = u(t) s + 5 (s + )(s + ) y(t) Il calcolo della trasformata del segnale di uscita è immediato:
...4 Risposta temporale: esempi Esempio. Calcolare la risposta al gradino unitario del seguente sistema: x(t) = u(t) s + 5 (s + )(s + ) y(t) Il calcolo della trasformata del segnale di uscita è immediato:
M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE
 M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE CORSO DI ORDINAMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Sessione d esame: 2013
M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE CORSO DI ORDINAMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Sessione d esame: 2013
Per un corretto funzionamento dei sistema si progetta un controllo a retroazione secondo lo schema di figura.
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Prova scritta di Controlli Automatici e sistemi elettrici lineari
 Prova scritta di Controlli Automatici e sistemi elettrici lineari Corso di Laurea in Ingegneria Meccatronica, AA 23 24 9 Giugno 24 NOTA BENE: In caso di punteggio inferiore od uguale a /3 nel compito scritto,
Prova scritta di Controlli Automatici e sistemi elettrici lineari Corso di Laurea in Ingegneria Meccatronica, AA 23 24 9 Giugno 24 NOTA BENE: In caso di punteggio inferiore od uguale a /3 nel compito scritto,
Lezione 12. Azione filtrante dei sistemi dinamici. F. Previdi - Automatica - Lez. 12 1
 Lezione. Azione filtrante dei sistemi dinamici F. Previdi - Automatica - Lez. Schema della lezione. Introduzione. Filtro passa-basso 3. Filtro passa-alto 4. Risonanza F. Previdi - Automatica - Lez. . Introduzione
Lezione. Azione filtrante dei sistemi dinamici F. Previdi - Automatica - Lez. Schema della lezione. Introduzione. Filtro passa-basso 3. Filtro passa-alto 4. Risonanza F. Previdi - Automatica - Lez. . Introduzione
FORMULARIO DI CONTROLLI AUTOMATICI
 FORMULARIO DI CONTROLLI AUTOMATICI Sistema x (t) = A x (t) + B u (t) y (t) = C x (t) + D u (t) Funzione di trasferimento G (s) = y (s) / u (s) = C (si A) -1 B + D Sistema Serie G (s) = i G i (s) prodotto
FORMULARIO DI CONTROLLI AUTOMATICI Sistema x (t) = A x (t) + B u (t) y (t) = C x (t) + D u (t) Funzione di trasferimento G (s) = y (s) / u (s) = C (si A) -1 B + D Sistema Serie G (s) = i G i (s) prodotto
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
La stabilità di un sistema non dipende dal segnale d ingresso, ma dipende solo dalla f.d.t. del sistema. Stabilità BIBO (Bound Input Bounded Output)
") 8.1 GENERALITÀ La stabilità di un sistema non dipende dal segnale d ingresso, ma dipende solo dalla f.d.t. del sistema f.d.t. = U(s) E(s) Stabilità BIBO (Bound Input Bounded Output) Un sistema lineare
8.1 GENERALITÀ La stabilità di un sistema non dipende dal segnale d ingresso, ma dipende solo dalla f.d.t. del sistema f.d.t. = U(s) E(s) Stabilità BIBO (Bound Input Bounded Output) Un sistema lineare
Soluzione degli esercizi del Capitolo 13
 Soluzione degli esercizi del Capitolo 3 Soluzione dell Esercizio 3. Il polinomio caratteristico desiderato è ϕ (s) = (s + 4) (s + ) = s 2 + 4s + 4 Uguagliando i coefficienti quelli del polinomio caratteristico
Soluzione degli esercizi del Capitolo 3 Soluzione dell Esercizio 3. Il polinomio caratteristico desiderato è ϕ (s) = (s + 4) (s + ) = s 2 + 4s + 4 Uguagliando i coefficienti quelli del polinomio caratteristico
SISTEMI ELEMENTARI DEL 1 o E 2 o ORDINE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm SISTEMI ELEMENTARI DEL o
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm SISTEMI ELEMENTARI DEL o
Corso di Laurea in Ingegneria Meccatronica SISTEMI ELEMENTARI DEL 1 o E 2 o ORDINE
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di Laurea in Ingegneria Meccatronica SISTEMI ELEMENTARI DEL o E 2 o ORDINE CA 5 Cesare Fantuzzi (cesare.fantuzzi@unimore.it)
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di Laurea in Ingegneria Meccatronica SISTEMI ELEMENTARI DEL o E 2 o ORDINE CA 5 Cesare Fantuzzi (cesare.fantuzzi@unimore.it)
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica
 PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
I CONTROLLORI PID. Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi:
 I CONTROLLORI PID Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi: Blocco Proporzionale Blocco Integrale Blocco Derivativo Funzione
I CONTROLLORI PID Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi: Blocco Proporzionale Blocco Integrale Blocco Derivativo Funzione
Classe V specializzazione elettronica. Sistemi automatici
 Macro unità n 1 Classe V specializzazione elettronica Sistemi automatici Sistema di sviluppo Arduino e traduttori Gli studenti proseguono e approfondiscono lo studio dei sistemi a microcontrollore e del
Macro unità n 1 Classe V specializzazione elettronica Sistemi automatici Sistema di sviluppo Arduino e traduttori Gli studenti proseguono e approfondiscono lo studio dei sistemi a microcontrollore e del
a.a. 2014/2015 Docente: Stefano Bifaretti
 a.a. 2014/2015 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Gli schemi circuitali impiegati per la realizzazione dei convertitori statici sono molteplici. Infatti, la struttura del convertitore
a.a. 2014/2015 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Gli schemi circuitali impiegati per la realizzazione dei convertitori statici sono molteplici. Infatti, la struttura del convertitore
Capitolo. Stabilità dei sistemi di controllo. 8.1 Generalità. 8.2 Criterio generale di stabilità. 8.3 Esercizi - Criterio generale di stabilità
 Capitolo 7 Stabilità dei sistemi di controllo 8.1 Generalità 8. Criterio generale di stabilità 8.3 Esercizi - Criterio generale di stabilità 8.4 Criterio di stabilità di Nyquist 8.5 Esercizi - Criterio
Capitolo 7 Stabilità dei sistemi di controllo 8.1 Generalità 8. Criterio generale di stabilità 8.3 Esercizi - Criterio generale di stabilità 8.4 Criterio di stabilità di Nyquist 8.5 Esercizi - Criterio
COMPORTAMENTO DI UN SISTEMA IN REGIME SINUSOIDALE
 COMPORTAMENTO DI UN SISTEMA IN REGIME SINUSOIDALE Un sistema risponde ad una sinusoide in ingresso con una sinusoide in uscita della stessa pulsazione. In generale la sinusoide d uscita ha una diversa
COMPORTAMENTO DI UN SISTEMA IN REGIME SINUSOIDALE Un sistema risponde ad una sinusoide in ingresso con una sinusoide in uscita della stessa pulsazione. In generale la sinusoide d uscita ha una diversa
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html ANALISI DEI SISTEMI IN RETROAZIONE E
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html ANALISI DEI SISTEMI IN RETROAZIONE E
4 Analisi nel dominio del tempo delle rappresentazioni in
 Indice del libro Alessandro Giua, Carla Seatzu Analisi dei sistemi dinamici, Springer-Verlag Italia, II edizione, 2009 Pagina web: http://www.diee.unica.it/giua/asd/ Prefazione.....................................................
Indice del libro Alessandro Giua, Carla Seatzu Analisi dei sistemi dinamici, Springer-Verlag Italia, II edizione, 2009 Pagina web: http://www.diee.unica.it/giua/asd/ Prefazione.....................................................
SECONDO BIENNIO ISTITUTO TECNICO ELETTRONICA ED ELETTROTECNICA
 SETTORE TECNOLOGICO ISTITUTO TECNICO INDIRIZZO ELETTRONICA ED ELETTROTECNICA ARTICOLAZIONE ELETTRONICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento, Art.5, comma 1 Nota: Le Competenze,
SETTORE TECNOLOGICO ISTITUTO TECNICO INDIRIZZO ELETTRONICA ED ELETTROTECNICA ARTICOLAZIONE ELETTRONICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento, Art.5, comma 1 Nota: Le Competenze,
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html REGOLATORI STANDARD PID Ing. e-mail:
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html REGOLATORI STANDARD PID Ing. e-mail:
Scomposizione in fratti semplici
 0.0.. Scomposizione in fratti semplici La determinazione dell evoluzione libera e dell evoluzione forzata di un sistema lineare stazionario richiedono l antitrasformazione di una funzione razionale fratta
0.0.. Scomposizione in fratti semplici La determinazione dell evoluzione libera e dell evoluzione forzata di un sistema lineare stazionario richiedono l antitrasformazione di una funzione razionale fratta
Controlli Automatici T. Analisi Armonica. Parte 5 Aggiornamento: Settembre Prof. L. Marconi
 Parte 5 Aggiornamento: Settembre 2010 Parte 5, 1 Analisi Armonica Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL: www-lar.deis.unibo.it/~lmarconi Analisi
Parte 5 Aggiornamento: Settembre 2010 Parte 5, 1 Analisi Armonica Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL: www-lar.deis.unibo.it/~lmarconi Analisi
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada 16 Luglio 2014
 a.a Prof. Silvia Strada 16 Luglio 2014") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2013-14 Prof. Silvia Strada 16 Luglio 2014 Nome e Cognome:........................... Matricola........................... Firma............................................................................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2013-14 Prof. Silvia Strada 16 Luglio 2014 Nome e Cognome:........................... Matricola........................... Firma............................................................................
Funzione di trasferimento
 Funzione ditrasferimento - 1 Corso di Laurea in Ingegneria Meccanica Funzione di trasferimento DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Definizione
Funzione ditrasferimento - 1 Corso di Laurea in Ingegneria Meccanica Funzione di trasferimento DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Definizione
Introduzione e strumenti. Introduzione ai sistemi di controllo
 Introduzione e strumenti Introduzione ai sistemi di controllo Introduzione ai sistemi di controllo Esempio di sistema di controllo Elementi costitutivi dei sistemi di controllo Strutture tipo e schemi
Introduzione e strumenti Introduzione ai sistemi di controllo Introduzione ai sistemi di controllo Esempio di sistema di controllo Elementi costitutivi dei sistemi di controllo Strutture tipo e schemi
Realizzazione digitale di controllori analogici
 Realizzazione digitale di controllori analogici Digitalizzazione di un controllore analogico Sistema di controllo r(t) uscita + - desiderata e(t) segnale di errore C(s) controllore analogico u(t) ingresso
Realizzazione digitale di controllori analogici Digitalizzazione di un controllore analogico Sistema di controllo r(t) uscita + - desiderata e(t) segnale di errore C(s) controllore analogico u(t) ingresso
Controlli Automatici Compito del - Esercizi
 Compito del - Esercizi. Data la funzione di trasferimento G(s) = s (s +),sicalcoli a) La risposta impulsiva g(t); b) L equazione differenziale associata al sistema G(s); c) Si commenti la stabilità del
Compito del - Esercizi. Data la funzione di trasferimento G(s) = s (s +),sicalcoli a) La risposta impulsiva g(t); b) L equazione differenziale associata al sistema G(s); c) Si commenti la stabilità del
Stabilità e risposte di sistemi elementari
 Parte 4 Aggiornamento: Settembre 2010 Parte 4, 1 Stabilità e risposte di sistemi elementari Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL: www-lar.deis.unibo.it/~lmarconi
Parte 4 Aggiornamento: Settembre 2010 Parte 4, 1 Stabilità e risposte di sistemi elementari Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL: www-lar.deis.unibo.it/~lmarconi
RICHIAMI MATEMATICI. x( t)
") 0.0. 0.1 1 RICHIAMI MATEMATICI Funzioni reali del tempo: (t) : t (t) (t) ( t) Funzioni reali dell ingresso: y() t t y( ) y() : y() Numeri complessi. Un numero complesso è una coppia ordinata di numeri
0.0. 0.1 1 RICHIAMI MATEMATICI Funzioni reali del tempo: (t) : t (t) (t) ( t) Funzioni reali dell ingresso: y() t t y( ) y() : y() Numeri complessi. Un numero complesso è una coppia ordinata di numeri
CONTROLLI AUTOMATICI I 03AKWcc Ing. Elettrica - Consorzio Nettuno Torino
 Tipologia Esercizio (modellistica) CONTOLLI AUTOMATICI I 03AKWcc Esercizio. (tema d'esame del //007) Nel sistema in figura, la tensione e u (t) è l ingresso e la tensione v (t) della resistenza è l uscita.
Tipologia Esercizio (modellistica) CONTOLLI AUTOMATICI I 03AKWcc Esercizio. (tema d'esame del //007) Nel sistema in figura, la tensione e u (t) è l ingresso e la tensione v (t) della resistenza è l uscita.
ANTITRASFORMATA DI LAPLACE MODI DI UN SISTEMA
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANTITRASFORMATA DI LAPLACE MODI DI UN SISTEMA Ing. Federica Grossi Tel.
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANTITRASFORMATA DI LAPLACE MODI DI UN SISTEMA Ing. Federica Grossi Tel.
REGOLATORI PID. Modello dei regolatori PID. Realizzazione dei regolatori PID. Metodi di taratura automatica
 REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI
REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI
rapporto tra ingresso e uscita all equilibrio.
 Sistemi Dinamici: Induttore: Condensatore: Massa: Oscillatore meccanico: Pendolo: Serbatoio cilindrico: Serbatoio cilindrico con valvola d efflusso: Funzione di Trasferimento: Stabilità del sistema: (N.B.
Sistemi Dinamici: Induttore: Condensatore: Massa: Oscillatore meccanico: Pendolo: Serbatoio cilindrico: Serbatoio cilindrico con valvola d efflusso: Funzione di Trasferimento: Stabilità del sistema: (N.B.
SECONDO BIENNIO ISTITUTO TECNICO
 SETTORE TECNOLOGICO DOCUMENTI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE AUTOMAZIONE ELETTRONICA ED ELETTROTECNICA ESITI DI APPRENDIMENTO Regolamento, Art. 5 comma 1 Nota: Le Competenze,
SETTORE TECNOLOGICO DOCUMENTI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE AUTOMAZIONE ELETTRONICA ED ELETTROTECNICA ESITI DI APPRENDIMENTO Regolamento, Art. 5 comma 1 Nota: Le Competenze,
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale RETI CORRETTRICI
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale RETI CORRETTRICI Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti Regolatori
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale RETI CORRETTRICI Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti Regolatori
Regolatori PID. Gianmaria De Tommasi 1. detommas@unina.it. Ottobre 2012 Corsi AnsaldoBreda
 Regolatori PID Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Regolatori PID Napoli - Ottobre 2012 1 / 38
Regolatori PID Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Regolatori PID Napoli - Ottobre 2012 1 / 38
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
CONCETTO DI STABILITÀ NEI SISTEMI DI CONTROLLO. Sistema in condizioni di equilibrio a t = 0. d(t) = 0. u(t) = 0. y(t) = 0. Sistema
 = 0. u(t) = 0. y(t) = 0. Sistema") CONCETTO DI STABILITÀ NEI SISTEMI DI CONTROLLO Sistema in condizioni di equilibrio a t = 0. d(t) = 0 u(t) = 0 Sistema y(t) = 0 Tipi di perturbazione. Perturbazione di durata limitata: u(t) = 0, t > T u
CONCETTO DI STABILITÀ NEI SISTEMI DI CONTROLLO Sistema in condizioni di equilibrio a t = 0. d(t) = 0 u(t) = 0 Sistema y(t) = 0 Tipi di perturbazione. Perturbazione di durata limitata: u(t) = 0, t > T u
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) ANNO SCOLASTICO 2005/2006 CORSO SPERIMENTALE LICEO TECNICO
 ANNO SCOLASTICO 2005/2006 CORSO SPERIMENTALE LICEO TECNICO") ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 2-56025 PONTEDERA (PI) 0587 53566/55390 - Fax: 0587 57411 - : iti@marconipontedera.it - Sito WEB: www.marconipontedera.it ANNO SCOLASTICO
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 2-56025 PONTEDERA (PI) 0587 53566/55390 - Fax: 0587 57411 - : iti@marconipontedera.it - Sito WEB: www.marconipontedera.it ANNO SCOLASTICO
In conduzione continua si ottiene una tensione sul carico v c proporzionale al valore desiderato v i.
 Controllo ad anello aperto Il filtro LC è necessario per ridurre le ondulazioni di corrente e di tensione ed è dimensionato in modo da mantenere v c circa costante. R rappresenta le perdite sugli avvolgimenti
Controllo ad anello aperto Il filtro LC è necessario per ridurre le ondulazioni di corrente e di tensione ed è dimensionato in modo da mantenere v c circa costante. R rappresenta le perdite sugli avvolgimenti
a.a. 2015/2016 Docente: Stefano Bifaretti
 a.a. 2015/2016 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Controllo ad anello aperto Il filtro LC è necessario per ridurre le ondulazioni di corrente e di tensione ed è dimensionato in
a.a. 2015/2016 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Controllo ad anello aperto Il filtro LC è necessario per ridurre le ondulazioni di corrente e di tensione ed è dimensionato in
ẋ 1 = 2x 1 + (sen 2 (x 1 ) + 1)x 2 + 2u (1) y = x 1
 + 1)x 2 + 2u (1) y = x 1") Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Introduzione all Automatica. Automatica ROMA TRE Stefano Panzieri- 1
 Introduzione all Automatica Automatica ROMA TRE Stefano Panzieri- 1 Descrivere un sistema fisico La mia moto è un sistema? Capire il suo comportamento Cosa é l Automatica Quanti Km faccio con un litro?
Introduzione all Automatica Automatica ROMA TRE Stefano Panzieri- 1 Descrivere un sistema fisico La mia moto è un sistema? Capire il suo comportamento Cosa é l Automatica Quanti Km faccio con un litro?
Lezione 20. Controllo del moto
 Lezione 20. Controllo del moto . Introduzione In questa lezione si affronta il tema del controllo del moto. Innanzitutto si progetta il controllore della corrente di armatura. Quindi si procederà alla
Lezione 20. Controllo del moto . Introduzione In questa lezione si affronta il tema del controllo del moto. Innanzitutto si progetta il controllore della corrente di armatura. Quindi si procederà alla
Risposta al gradino di un sistema del primo ordine
 0.0..4 Risposta al gradino di un sistema del primo ordine Diagramma Si consideri il seguente sistema lineare del primo ordine: G(s) = +τ s L unico parametro che caratterizza il sistema è la costante di
0.0..4 Risposta al gradino di un sistema del primo ordine Diagramma Si consideri il seguente sistema lineare del primo ordine: G(s) = +τ s L unico parametro che caratterizza il sistema è la costante di
Lezione 5 01 Febbraio. 5.1 Richiami di controlli automatici
 LabCont1: Laboratorio di Controlli 1 II Trim. 2007 Lezione 5 01 Febbraio Docente: Luca Schenato Stesori: Lago Paolo, Maso GIulia, Segato Giordano 5.1 Richiami di controlli automatici 5.1.1 Progettazione
LabCont1: Laboratorio di Controlli 1 II Trim. 2007 Lezione 5 01 Febbraio Docente: Luca Schenato Stesori: Lago Paolo, Maso GIulia, Segato Giordano 5.1 Richiami di controlli automatici 5.1.1 Progettazione