Metodi ai minimi quadrati e regolarizzazione. Corso di laurea Matematica
|
|
|
- Ivo Di Matteo
- 6 anni fa
- Visualizzazioni
Transcript

1 Metodi ai minimi quadrati e regolarizzazione Corso di laurea Matematica Gabriele Stocchino Anno di corso 2014/2015!1
2 Implementazione degli algoritmi per la fattorizzazione QR 3 Fattorizzazione QR di Householder 3 Fattorizzazione QR di Givens 4 Classical Gram-Schmidt 6 Modified Gram-Schmidt 6 Test degli algoritmi 7 Errori commessi nella fattorizzazione 7 Confronto delle ortogonalità della matrice Q 10 Confronto delle soluzioni di sistemi lineari 13 Confronto dei tempi di calcolo 17 Risoluzione di un sistema sottodeterminato 19 Test sul principio di discrepanza 21!2
3 Implementazione degli algoritmi per la fattorizzazione QR Di seguito verranno riportati gli algoritmi per la fattorizzazione QR sfruttando i metodi di Housholder, di Givems, la Classical Gram-Schmidt (CGS) e la Modified Gram-Schmidt (MGS). Questi metodi sono implementati in MATLAB. Fattorizzazione QR di Householder L algoritmo della fattorizzazione QR di Householder è il seguente: Algorithm 1 function [Q,A]=qrh(A) n=size(a); Q=eye(n(1)); if n(1)==n(2); for i=1:n(1)-1 [u,delta]=aus(a(i:n(1),i)); % aggiorno A A(i:n,:)=A(i:n,:)-u*u'*A(i:n,:)/delta; % aggiorno Q Q(:,i:n)=Q(:,i:n)-Q(:,i:n)*u*u'/delta; else m=min(n(1),n(2)); for i=1:m [u,delta]=aus(a(i:n(1),i)); % aggiorno A A(i:n(1),:)=A(i:n(1),:)-u*u'*A(i:n(1),:)/delta; % aggiorno Q Q(:,i:n(1))=Q(:,i:n(1))-Q(:,i:n(1))*u*u'/delta;!3
4 Dove la funzione aus è la seguente: Algorithm 2 function [x,beta]=aus(x) n=length(x); sigma=norm(x); k=-sign(x(1))*sigma; beta=sigma*(sigma+abs(x(1))); x(1)=x(1)-k; Fattorizzazione QR di Givens L algoritmo della fattorizzazione QR di Givens è il seguente: Alghoritm 3 function [Q,A]=qrg(A) n=size(a); Q=eye(n(1)); if n(1)==n(2) for k=1:n-1 for i=k+1:n if ne(a(i,k),0)==1 [c,s]=givaux(a(k,k),a(i,k)); % aggiorno A t=c*a(k,k:n)+s*a(i,k:n); A(i,k:n)=c*A(i,k:n)-s*A(k,k:n); A(k,k:n)=t; % aggiorno Q u=c*q(:,i)-s*q(:,k); Q(:,k)=s*Q(:,i)+c*Q(:,k); Q(:,i)=u;!4
5 else for k=1:n(2) for i=k+1:n(1) if ne(a(i,k),0)==1 [c,s]=givaux(a(k,k),a(i,k)); % aggiorno A t=c*a(k,k:n(2))+s*a(i,k:n(2)); A(i,k:n(2))=c*A(i,k:n(2))-s*A(k,k:n(2)); A(k,k:n(2))=t; % aggiorno Q u=c*q(:,i)-s*q(:,k); Q(:,k)=s*Q(:,i)+c*Q(:,k); Q(:,i)=u; Dove Givaux è il seguente: Algorithm 4 function [c,s]=givaux(x,y) if y==0 c=1; s=0; elseif abs(y)>abs(x) t=x/y; z=sqrt(1+t^2); s=1/z; c=t*s; else t=y/x; z=sqrt(1+t^2); c=1/z; s=t*c;!5
6 Classical Gram-Schmidt L algoritmo CGS è il seguente: Algorithm 5 function [A,R]=cgs(A) n=size(a); if ne(n(1),n(2))==1 error('matrice non quadrata'); R=zeros(n); for k=1:n R(1:k-1,k)=A(:,1:k-1)'*A(:,k); A(:,k)=A(:,k)-A(:,1:k-1)*R(1:k-1,k); R(k,k)=norm(A(:,k)); A(:,k)=A(:,k)/R(k,k); Modified Gram-Schmidt L algoritmo MCGS è il seguente: Algorithm 6 function [A,R]=mgs(A) n=size(a); if ne(n(1),n(2))==1 error('matrice non quadrata'); R=zeros(n); for k=1:n R(k,k)=norm(A(:,k)); A(:,k)=A(:,k)/R(k,k); R(k,k+1:n)=A(:,k)'*A(:,k+1:n); A(:,k+1:n)=A(:,k+1:n)-A(:,k)*R(k,k+1:n);!6
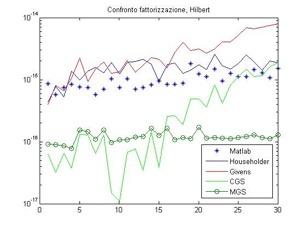
7 Test degli algoritmi Errori commessi nella fattorizzazione Un primo test che è possibile fare è quello di verificare se le matrici Q ed R trovate dagli algoritmi visti sopra effettivamente fattorizzino A. Il codice del test è il seguente: Test 1 % Confronto tra gli errori commessi dagli algoritmi di fattorizzazione QR nmax=300; passo=10; i=0; err1=zeros(round(nmax/passo),1); err2=zeros(round(nmax/passo),1); err3=zeros(round(nmax/passo),1); err4=zeros(round(nmax/passo),1); err5=zeros(round(nmax/passo),1); for n=passo:passo:nmax i=i+1; A=hilb(n); [q1,r1]=qr(a); [q2,r2]=qrh(a); [q3,r3]=qrg(a); [q4,r4]=cgs(a); [q5,r5]=mgs(a); err1(i,1)=norm(a-q1*r1);!7
8 err2(i,1)=norm(a-q2*r2); err3(i,1)=norm(a-q3*r3); err4(i,1)=norm(a-q4*r4); err5(i,1)=norm(a-q5*r5); % Realizzazione del grafico x=[1:i] ; semilogy(x,err1,'*',x,err2,'b',x,err3,'r',x,err4,'g',x,err5,'o -'); leg( Matlab','Householder','Givens','CGS','MGS') Il confronto è stato fatto con matrici casuali, di Hilbert e di Vandermonde sfruttando i quattro metodi proposti sopra e usando la fattorizzazione QR di Matlab. La decisione di confrontare i metodi usando delle matrici casuali,le matrici di Hilbert e di Vandermonde è data dal fatto di verificare se le fattorizzazioni trovate possano dipere dal condizionamento della matrice in quanto è noto che quest ultime abbiano un elevato numero di condizionamento. Per quanto riguarda il caso delle matrici di Vandermonde, si è prima costruito un vettore casuale, e poi tramite la funzione predefinita di Matlab Vander si è costruita la matrice. Come si può notare dalle immagini riportate nella pagina successiva, l errore commesso dagli algoritmi rimane limitato senza mai raggiungere il valore di nonostante si arrivi a fattorizzare una matrice 300 x 300. Inoltre, escluso il caso della fattorizzazione di Householder nel caso delle matrici di Vandermonde, sembra che l errore commesso dalla fattorizzazione non dipa dal condizionamento della matrice. In questo test le fattorizzazioni CGS e MGS sembrerebbero essere migliori delle altre, tuttavia si mostrerà in seguito che durante l esecuzione dell algoritmo, si perde l ortogonalità delle colonne della matrice Q. Un altra caratteristica che si può notare, è che la funzione predefinita di Matlab qr non è altro che una fattorizzazione di Householder ottimizzata.!8
9 !9
10 Confronto delle ortogonalità della matrice Q Di seguito viene riportato lo script riguardante il confronto dell ortogonalità della matrice Q: Test 2 % Confronto delle ortogonalità degli algoritmi di fattorizzazione QR nmax=250; passo=10; i=0; err1=zeros(round(nmax/passo),1); err2=zeros(round(nmax/passo),1); err3=zeros(round(nmax/passo),1); err4=zeros(round(nmax/passo),1); err5=zeros(round(nmax/passo),1); for n=passo:passo:nmax i=i+1; A=rand(n); [q1,r1]=qr(a); q2=qrh(a); q3=qrg(a); q4=cgs(a); q5=mgs(a); err1(i,1)=norm(q1*q1'); err2(i,1)=norm(q2*q2'); err3(i,1)=norm(q3*q3'); err4(i,1)=norm(q4*q4'); err5(i,1)=norm(q5*q5'); % realizzazione del grafico x=[1:i];!10
11 semilogy(x,err1,'*',x,err2,'b',x,err3,'r',x,err4,'g',x,err5,'o -'); leg('matlab','householder','givens','cgs','mgs') Come prima, il test è stato effettuato confrontando i quattro algoritmi implementati nel primo capitolo e l algoritmo qr di Matlab usando matrici casuali, di Hilbert e di Vandermonde. Come si può notare dalle immagini riporatte nella pagina successiva, mentre la fattorizzazione di Householder, di Givems, e la fattorizzazione predefinita di Matlab conservano l ortogonalità, le fattorizzazione di Cholesky no. O meglio, La MGS è in grado di conservare l ortogonalità per matrici con un numero di condizionamento basso ( si veda la prima immagine). Tuttavia, quando il condizionamento aumenta, progressivamente le colonne della matrice Q non sono più ortogonali tra loro e il che re l algoritmo MGS inefficace e il fatto che l errore commesso dalla MGS sia minore rispetto a quella CGS non è importante in quanto dalla teoria occorre che Q sia ortogonale.!11
12 !12
13 Confronto delle soluzioni di sistemi lineari La fattorizzazione QR è molto utile per la risoluzione di sistemi lineari, per cui nel seguente test si sono confrontate gli errori commessi per la risoluzione di sistemi lineari quadrati. Test 3 % Confronto delle soluzioni di un sistema lineare tramite fattorizzazione QR nmax=200; passo=10; i=0; err1=zeros(round(nmax/passo),1); err2=zeros(round(nmax/passo),1); err3=zeros(round(nmax/passo),1); err4=zeros(round(nmax/passo),1); err5=zeros(round(nmax/passo),1); for n=passo:passo:nmax i=i+1; A=rand(n); sol=ones(n,1); be=a*sol; delta=10^-14; b=be+norm(be)*delta*randn(n,1)/sqrt(n); [q1,r1]=qr(a); [q2,r2]=qrh(a); [q3,r3]=qrg(a); [q4,r4]=cgs(a); [q5,r5]=mgs(a); x1=r1\(q1'*b); x2=r2\(q2'*b); x3=r3\(q3'*b); x4=r4\(q4'*b); x5=r5\(q5'*b);!13
14 err1(i,1)=norm(a*x1-be); err2(i,1)=norm(a*x2-be); err3(i,1)=norm(a*x3-be); err4(i,1)=norm(a*x4-be); err5(i,1)=norm(a*x5-be); % Realizzazione del grafico x=[1:i]; semilogy(x,err1,'*',x,err2,'b',x,err3,'r',x,err4,'g',x,err5,'o -'); leg('matlab','householder','givens','cgs','mgs') Si è considerato un errore Gaussiano dipente da un parametro delta pari a e come matrici delle casuali, di Hilbert e di Vandermonde. Come si può notare dalle immagini riportate nella pagina successiva, la fattorizzazione QR di Householder e di Givens risultano essere molto efficaci nella risoluzione di sistemi lineari anche nel caso in cui la matrice sia di Hilbert. Al contrario, la fattorizzazione CGS e MGS risultano inefficaci per la risoluzione di sitemi lineari e ciò è dovuto al fatto che la matrice Q perde l ortogonalità e quindi la sua inversa te a non coincidere con la trasposta. Per quanto riguarda il caso di sistemi lineari le cui matrici associate sono di Vandermonde, qualsiasi fattorizzazione risulta inefficace, il che può essere spiegato dal fatto he il condizionamento sia molto elevato. In tal caso, un modo per evitare questo problema è quello di fattorizzare la matrice (A b). Al termine dell algoritmo l ultima colonna della matrice R conterrà il vettore Q T *b. Questo metodo migliora notevolmente la soluzione ed è ingrasso di risolvere anche il caso in cui la matrice sia di Vandermonde. Usando sempre i sistemi lineari, è possibile fare un secondo test, faco variare il valore delta contenuto nel test 3. Nelle immagine riportare in seguito si è fatto il test nel caso -13, -12, -11 e si può notare come le soluzioni tono a coincidere all aumentare dell errore.!14
15 Risultati sistemi lineari!15
16 Risultati al variare del delta!16
17 Confronto dei tempi di calcolo Può essere utile confrontare gli algoritmi proposti in funzione del tempo di calcolo. Test 4 %Confronto tra il tempo impiegato dagli algoritmi di fattorizzazione QR nmax=250; passo=10; i=0; t1=zeros(round(nmax/passo),1); t2=zeros(round(nmax/passo),1); t3=zeros(round(nmax/passo),1); t4=zeros(round(nmax/passo),1); t5=zeros(round(nmax/passo),1); for n=passo:passo:nmax i=i+1; A=rand(n); tic [q1,r1]=qr(a); t1(i)=toc; tic [q2,r2]=qrh(a); t2(i)=toc; tic [q3,r3]=qrg(a); t3(i)=toc; tic [q4,r4]=cgs(a); t4(i)=toc; tic [q5,r5]=mgs(a); t5(i)=toc;!17
![% Realizzazione del grafico x=[1:i]; semilogy(x,t1,'*',x,t2,'b',x,t3,'r',x,t4,'g',x,t5,'o-'); leg('matlab','householder','givens','cgs','mgs') In questo caso è stato compiuto il test per matrici](/docs-images/64/51938217/images/18-1.jpg "casuali e di Hessenberg.")
18 % Realizzazione del grafico x=[1:i]; semilogy(x,t1,'*',x,t2,'b',x,t3,'r',x,t4,'g',x,t5,'o-'); leg('matlab','householder','givens','cgs','mgs') In questo caso è stato compiuto il test per matrici casuali e di Hessenberg. La scelta di usare quest ultimo tipo di matrici è motivato dal fatto che la fattorizzazione di Givens trasforma la matrice A in una triangolare superiore premoltiplicando quest ultima con opportune matrici di Givens in modo tale da annullare le componenti di A al di sotto della diagonale principale. Se Alcune di queste sono già nulle la moltiplicazione non viene effettuata. Per cui se la matrice è sparsa, come nel caso delle matrici di Hessenberg, il tempo di calcolo si dovrebbe vedere diminuito. La matrice di Hessenberg è stata calcolata tramite il comando hess di Matlab. Come si può notare dalle immagini riportate nella pagina successiva, l errore atteso da Givens diminuisce significativamente. Inoltre, dalla teoria è noto che il numero di calcoli eseguiti dalla fattorizzazione di Householder è la metà di quella di Givens ma così non avviene. Ciò è spiegato dal fatto che l algoritmo non è implementato in maniera migliore possibile.!18
19 Risoluzione di un sistema sottodeterminato La ricerca di una soluzione di un sistema sottodeterminato Ax=b è un problema mal posto, per cui si per portarlo ad uno ben posto occorre imporre che la norma di Ax-b sia minima così come la norma. Nel seguente test si è verificato se la soluzione mediante la fattorizzazione SVD e tramite la funzione predefinita di matlab soddisfino questa richiesta. Test 5 % test numerici sul metodo dei minimi quadrati applicato ad un sistema sottodeterminato clear clc for m=10:10:50 n=2*m; A=rand(m,n); x=20*rand(n,1); be=a*x; [u s v]=svd(a); b=be; n1(m/10,:)=norm(x);!19
20 % Risoluzione mediante SVD s(1:m,1:m)=inv(s(1:m,1:m)); xsvd=v*s'*u'*b; diffsvd(m/10,:)=norm(x-xsvd); n2(m/10,:)=norm(xsvd); % Risoluzione mediante \ xm=a\b; diffmat(mn/10,:)=norm(x-xm); n3(mn/10,:)=norm(xm); Si sono trovati i seguenti risultati: differenza con soluzione SVD Differenza con soluzione di matlab dimensione 20, , , , , , , , , , norma esatta norma SVD norma Matlab 56, , , , , , , , , , , , , , , Come si può notare, la soluzione mediante fattorizzazione SVD è più competitiva rispetto a quella fornita da Matlab. Questo è dovuto al fatto che se il sistema è sottodeterminato, Matlab inserisce tanti zeri quant è la quantità m-n.!20
21 Test sul principio di discrepanza Se è noto il noise, un valido metodo di regolarizzazione per i la risoluzione di sistemi lineari è il principio di discrepanza. Nel seguente test si è verificato empiricamente questo fatto confrontando con la soluzione esatta data usando la fattorizzazione SVD. Test 6 % test numerico sul principio di discrepanza clear clc for n=10:10:50 A=rand(n); xe=ones(n,1); be=a*xe; delta=10^-2; b=be+norm(be)*delta*randn(n,1)/sqrt(n); e=norm(be-b); [u s v]=svd(a); % Scelgo il k k=0; for i=1:n if s(i,i)>e k=k+1; x=zeros(n,1); for i=1:k x=x+u(:,i) *b*v(:,i)/s(i,i); y=zeros(n,1); for i=1:n y=y+u(:,i) *b*v(:,i)/s(i,i);!21
22 n1(n/10,:)=norm(x-xe); n2(n/10,:)=norm(x-y); a=[1:n/10]; semilogy(a,n2, b,a,n1, r ); title( Confronto, Rand ); leg( esatta, discrepanza ); Il test è stato fatto su matrici casuali e di Hilbert, in quanto in questi ultimi dovrebbe essere più evidente, e così avviene come si può notare dalle immagini riportate. Si può notare come la conoscenza dell errore introdotto dai dati risulti vantaggiosa per la soluzione di un sistema lineare, in particolare se è fortemente mal condizionato.!22
23 !23
Sistemi lineari. Lucia Gastaldi. DICATAM - Sez. di Matematica,
 Sistemi lineari Lucia Gastaldi DICATAM - Sez. di Matematica, http://www.ing.unibs.it/gastaldi/ Indice 1 Risoluzione di sistemi lineari Risoluzione di sistemi lineari in Matlab Metodi di risoluzione Fattorizzazione
Sistemi lineari Lucia Gastaldi DICATAM - Sez. di Matematica, http://www.ing.unibs.it/gastaldi/ Indice 1 Risoluzione di sistemi lineari Risoluzione di sistemi lineari in Matlab Metodi di risoluzione Fattorizzazione
2. Risolvere con il metodo di eliminazione di Gauss con pivoting parziale il seguente sistema lineare:
 Esercizi sui metodi diretti per la risoluzione di sistemi lineari 1. Data la matrice 1 0 2 1 3 1 5 2 1 determinare la sua fattorizzazione P LR. Risolvere il sistema Ax = b con b = (3, 5, 6) T mediante
Esercizi sui metodi diretti per la risoluzione di sistemi lineari 1. Data la matrice 1 0 2 1 3 1 5 2 1 determinare la sua fattorizzazione P LR. Risolvere il sistema Ax = b con b = (3, 5, 6) T mediante
Metodi diretti: eliminazione gaussiana
 Calcolo numerico 08/09 p. 1/1 SISTEMI LINEARI Metodi diretti: eliminazione gaussiana Calcolo numerico 08/09 p. 2/1 Sistemi lineari Ax = b, A R n n, b R n b INPUT x OUTPUT A relazione funzionale non ambigua
Calcolo numerico 08/09 p. 1/1 SISTEMI LINEARI Metodi diretti: eliminazione gaussiana Calcolo numerico 08/09 p. 2/1 Sistemi lineari Ax = b, A R n n, b R n b INPUT x OUTPUT A relazione funzionale non ambigua
Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari
 Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari 4 maggio Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ) Esercizio Siano 3 6 8 6 4 3 3 ) determinare
Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari 4 maggio Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ) Esercizio Siano 3 6 8 6 4 3 3 ) determinare
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
RISOLUZIONE DI SISTEMI LINEARI
 RISOLUZIONE DI SISTEMI LINEARI Algebra lineare numerica 1 La risoluzione di un sistema lineare è il nucleo principale del processo di risoluzione di circa il 70% di tutti i problemi reali Per la risoluzione
RISOLUZIONE DI SISTEMI LINEARI Algebra lineare numerica 1 La risoluzione di un sistema lineare è il nucleo principale del processo di risoluzione di circa il 70% di tutti i problemi reali Per la risoluzione
Sistemi lineari. 2x 1 + x 2 x 3 = 2 x 1 x 2 + x 3 = 1 x 1 + 3x 2 2x 3 = 0. x 1 x 2 x 3
 Sistemi lineari 2x 1 + x 2 x 3 = 2 x 1 x 2 + x 3 = 1 x 1 + 3x 2 2x 3 = 0 2 1 1 1 1 1 1 3 2 x 1 x 2 x 3 = 2 1 0 n j=1 a i,jx j = b i, i = 1,, n Ax = b A = (a i,j ) R n n matrice invertibile (det(a) 0) b
Sistemi lineari 2x 1 + x 2 x 3 = 2 x 1 x 2 + x 3 = 1 x 1 + 3x 2 2x 3 = 0 2 1 1 1 1 1 1 3 2 x 1 x 2 x 3 = 2 1 0 n j=1 a i,jx j = b i, i = 1,, n Ax = b A = (a i,j ) R n n matrice invertibile (det(a) 0) b
Altre trasformazioni elementari
 Altre trasformazioni elementari Si possono definire altri tipi di trasformazioni elementari Analogamente alle trasformazioni di Gauss, esse danno luogo a fattorizzazioni Trasformazione elementari di Givens
Altre trasformazioni elementari Si possono definire altri tipi di trasformazioni elementari Analogamente alle trasformazioni di Gauss, esse danno luogo a fattorizzazioni Trasformazione elementari di Givens
Esercitazione 1-I parte
 Esercitazione 1-I parte Argomento: Sistemi triangolari Scopo: Implementare il metodo di sostituzione all indietro per la risoluzione di sistemi triangolari superiori. function x=indietro(a,b) Sintassi
Esercitazione 1-I parte Argomento: Sistemi triangolari Scopo: Implementare il metodo di sostituzione all indietro per la risoluzione di sistemi triangolari superiori. function x=indietro(a,b) Sintassi
Determinazione degli zeri di una formula Gaussiana mediante l'algoritmo QR per il calcolo degli autovalori di una matrice.
 Determinazione degli zeri di una formula Gaussiana mediante l'algoritmo QR per il calcolo degli autovalori di una matrice. Andrea Salimbeni 39919 Relatore Prof. Giuseppe Rodriguez Indice Premesse pg. 3
Determinazione degli zeri di una formula Gaussiana mediante l'algoritmo QR per il calcolo degli autovalori di una matrice. Andrea Salimbeni 39919 Relatore Prof. Giuseppe Rodriguez Indice Premesse pg. 3
Esercitazione 4: Vettori e Matrici
 Esercitazione 4: Vettori e Matrici Richiami di teoria: Norme di vettore Principali norme di vettore:. x = n i= x i 2. x 2 = n i= x i 2 3. x = max i n x i Ad esempio dato il vettore x = (, 2, 3, 4) abbiamo.
Esercitazione 4: Vettori e Matrici Richiami di teoria: Norme di vettore Principali norme di vettore:. x = n i= x i 2. x 2 = n i= x i 2 3. x = max i n x i Ad esempio dato il vettore x = (, 2, 3, 4) abbiamo.
Metodi computazionali per i Minimi Quadrati
 Metodi computazionali per i Minimi Quadrati Come introdotto in precedenza si considera la matrice. A causa di mal condizionamenti ed errori di inversione, si possono avere casi in cui il e quindi S sarebbe
Metodi computazionali per i Minimi Quadrati Come introdotto in precedenza si considera la matrice. A causa di mal condizionamenti ed errori di inversione, si possono avere casi in cui il e quindi S sarebbe
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Pivoting e stabilità Se la matrice A non appartiene a nessuna delle categorie precedenti può accadere che al k esimo passo risulti a (k) k,k = 0, e quindi il
INTRODUZIONE A MATLAB
 INTRODUZIONE A MATLAB M.R. Russo Università degli Studi di Padova Dipartimento di Matematica Pura ed Applicata A.A. 2008/2009 INDICE Sistemi lineari Casi particolari Eliminazione di Gauss Fattorizzazione
INTRODUZIONE A MATLAB M.R. Russo Università degli Studi di Padova Dipartimento di Matematica Pura ed Applicata A.A. 2008/2009 INDICE Sistemi lineari Casi particolari Eliminazione di Gauss Fattorizzazione
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame
 Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Calcolo Numerico Informatica Manolo Venturin A.A. 2010 2011 Guida all esame Testo aggiornato al 23 maggio 2011. L esame consiste in una prova scritta della durata di 2 ore. Tale prova è composta da tre/-
Introduzione al MATLAB c Parte 3 Script e function
 Introduzione al MATLAB c Parte 3 Script e function Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 M-file di tipo Script e Function Script Function 2 Gestione dell
Introduzione al MATLAB c Parte 3 Script e function Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 M-file di tipo Script e Function Script Function 2 Gestione dell
Interpolazione polinomiale. Gabriella Puppo
 Interpolazione polinomiale Gabriella Puppo Interpolazione polinomiale Matrice di Vandermonde Costruzione del polinomio di interpolazione Studio dell errore Fenomeno di Runge Condizionamento Matrice di
Interpolazione polinomiale Gabriella Puppo Interpolazione polinomiale Matrice di Vandermonde Costruzione del polinomio di interpolazione Studio dell errore Fenomeno di Runge Condizionamento Matrice di
Aritmetica in Floating Point
 Aritmetica in Floating Point Esempio di non associatività Alcune proprietà delle operazioni in aritmetica esatta possono non valere in aritmetica finita in virgola mobile (floating point). Ad esempio:
Aritmetica in Floating Point Esempio di non associatività Alcune proprietà delle operazioni in aritmetica esatta possono non valere in aritmetica finita in virgola mobile (floating point). Ad esempio:
Esercitazione di Calcolo Numerico 1 22 Aprile Determinare la fattorizzazione LU della matrice a 1 1 A = 3a 2 a 2a a a 2 A =
 Esercitazione di Calcolo Numerico 22 Aprile 29. Determinare la fattorizzazione LU della matrice a A = 3a 2 a 2a a a 2 ed utilizzarla per calcolare il det(a). 2. Calcolare il determinante della matrice
Esercitazione di Calcolo Numerico 22 Aprile 29. Determinare la fattorizzazione LU della matrice a A = 3a 2 a 2a a a 2 ed utilizzarla per calcolare il det(a). 2. Calcolare il determinante della matrice
Esercitazione 5: Sistemi a risoluzione immediata.
 Esercitazione 5: Sistemi a risoluzione immediata. Ipotesi: Supponiamo le matrici non singolari. Nota: Per verificare che si ha risolto correttamente il sistema lineare Ax = b basta calcolare la norma del
Esercitazione 5: Sistemi a risoluzione immediata. Ipotesi: Supponiamo le matrici non singolari. Nota: Per verificare che si ha risolto correttamente il sistema lineare Ax = b basta calcolare la norma del
ISTRUZIONI PER LA CONSEGNA DEI FILE MATLAB
 Calcolo Numerico ed Elementi di Analisi - Allievi AEROSPAZIALI Proff. S. Micheletti, S. Perotto A.A. 20/202, Appello 28 Gennaio 203 NOME... COGNOME... MATRICOLA... DOCENTE... AULA... PC... Ver.A I seguenti
Calcolo Numerico ed Elementi di Analisi - Allievi AEROSPAZIALI Proff. S. Micheletti, S. Perotto A.A. 20/202, Appello 28 Gennaio 203 NOME... COGNOME... MATRICOLA... DOCENTE... AULA... PC... Ver.A I seguenti
1. Martedì 27/09/2016, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Chimica e Meccanica 6 CFU - A.A. 2016/2017 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2016 1. Martedì 27/09/2016,
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Chimica e Meccanica 6 CFU - A.A. 2016/2017 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2016 1. Martedì 27/09/2016,
Lezione n. 1. Introduzione all analisi numerica (richiami di algebra lineare e analisi funzionale)
") Lezione n. 1 Introduzione all analisi numerica (richiami di algebra lineare e analisi funzionale) R. Albanese, "Metodi numerici Pag. 1 Pag. 2 Programma 1. Introduzione all analisi numerica (richiami di
Lezione n. 1 Introduzione all analisi numerica (richiami di algebra lineare e analisi funzionale) R. Albanese, "Metodi numerici Pag. 1 Pag. 2 Programma 1. Introduzione all analisi numerica (richiami di
Prendiamo in considerazione la matrice tridiagonale
 Questi esercizi sono il completamento di quelli sui sistemi lineari già a disposizione. Ogni esercizio proposto può fare riferimento a qualcuno di questi. In ogni caso sono riportati tutti i dati essenziali
Questi esercizi sono il completamento di quelli sui sistemi lineari già a disposizione. Ogni esercizio proposto può fare riferimento a qualcuno di questi. In ogni caso sono riportati tutti i dati essenziali
Capitolo 1. Esercizi a.a Esercizi. Esercizio 1.1 Dimostrare che il metodo iterativo
 Capitolo Esercizi a.a. 206-7 Esercizi Esercizio. Dimostrare che il metodo iterativo x k+ = Φ(x k ), k = 0,,..., se convergente a x, deve verificare la condizione di consistenza x = Φ(x ). Ovvero, la soluzione
Capitolo Esercizi a.a. 206-7 Esercizi Esercizio. Dimostrare che il metodo iterativo x k+ = Φ(x k ), k = 0,,..., se convergente a x, deve verificare la condizione di consistenza x = Φ(x ). Ovvero, la soluzione
1 Risoluzione di sistemi lineari
 Risoluzione di sistemi lineari La presente nota è in parte ripresa dal testo D Bini M Capovani O Menchi Metodi numerici per l algebra lineare Zanichelli Editore Siano A una matrice non singolare di ordine
Risoluzione di sistemi lineari La presente nota è in parte ripresa dal testo D Bini M Capovani O Menchi Metodi numerici per l algebra lineare Zanichelli Editore Siano A una matrice non singolare di ordine
Un sistema lineare si rappresenta in generale come
 SISTEMI LINEARI Un sistema lineare si rappresenta in generale come n j=1 a ij x j = b i i = 1, 2,..., m o anche AX = B. La soluzione esiste se e solo se B appartiene allo spazio lineare generato dalle
SISTEMI LINEARI Un sistema lineare si rappresenta in generale come n j=1 a ij x j = b i i = 1, 2,..., m o anche AX = B. La soluzione esiste se e solo se B appartiene allo spazio lineare generato dalle
Autovalori ed autovettori di una matrice
 Autovalori ed autovettori di una matrice Lucia Gastaldi DICATAM http://www.ing.unibs.it/gastaldi/ Indice 1 Definizioni di autovalori ed autovettori Autovalori ed autovettori 2 Metodo delle potenze 3 Calcolo
Autovalori ed autovettori di una matrice Lucia Gastaldi DICATAM http://www.ing.unibs.it/gastaldi/ Indice 1 Definizioni di autovalori ed autovettori Autovalori ed autovettori 2 Metodo delle potenze 3 Calcolo
Progetto Matlab N 2. Calcolo Numerico 6 CFU. Corso di Laurea in Ingegneria delle Comunicazioni 31/05/2014
 Progetto Matlab N 2 Calcolo Numerico 6 CFU Corso di Laurea in Ingegneria delle Comunicazioni 31/05/2014 Procedimento 1. Scrivere una function che implementi il prodotto matrice-vettore AX con A matrice
Progetto Matlab N 2 Calcolo Numerico 6 CFU Corso di Laurea in Ingegneria delle Comunicazioni 31/05/2014 Procedimento 1. Scrivere una function che implementi il prodotto matrice-vettore AX con A matrice
Matrici elementari e fattorizzazioni
 Matrici elementari e fattorizzazioni Dario A Bini, Università di Pisa 19 ottobre 2015 Sommario Questo modulo didattico introduce ed analizza la classe delle matrici elementari Tale classe verrà usata per
Matrici elementari e fattorizzazioni Dario A Bini, Università di Pisa 19 ottobre 2015 Sommario Questo modulo didattico introduce ed analizza la classe delle matrici elementari Tale classe verrà usata per
Corso di Calcolo Numerico
 Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Corso di Calcolo Numerico Dottssa MC De Bonis Università degli Studi della Basilicata, Potenza Facoltà di Ingegneria Corso di Laurea in Ingegneria Meccanica Corso di Calcolo Numerico - Dottssa MC De Bonis
Programma del corso di: Calcolo Numerico Corso di laurea in Matematica a.a. 2005-06 Prof. B.Paternoster
 Programma del corso di: Calcolo Numerico Corso di laurea in Matematica a.a. 2005-06 Prof. B.Paternoster Richiami di analisi degli errori. Rappresentazione dei numeri in un calcolatore. Operazioni di macchina.
Programma del corso di: Calcolo Numerico Corso di laurea in Matematica a.a. 2005-06 Prof. B.Paternoster Richiami di analisi degli errori. Rappresentazione dei numeri in un calcolatore. Operazioni di macchina.
Esercitazione 1. Argomento: Introduzione al MATLAB Scopo: Eseguire alcune semplici istruzioni MatLab e imparare l uso della grafica.
 Esercitazione 1 Argomento: Introduzione al MATLAB Scopo: Eseguire alcune semplici istruzioni MatLab e imparare l uso della grafica. Scopo di questa prima esercitazione è quello di iniziare a conoscere
Esercitazione 1 Argomento: Introduzione al MATLAB Scopo: Eseguire alcune semplici istruzioni MatLab e imparare l uso della grafica. Scopo di questa prima esercitazione è quello di iniziare a conoscere
Corso di laurea in Informatica Calcolo Numerico Prof.ssa L. D Amore 12 Dicembre 2008 Esercizi di riepilogo tipo prova d esame
 1 Cognome: Nome: Matricola: Corso di laurea in Informatica Calcolo Numerico Prof.ssa L. D Amore 12 Dicembre 2008 Esercizi di riepilogo tipo prova d esame 1. Si consideri il sistema aritmetico f. p. a precisione
1 Cognome: Nome: Matricola: Corso di laurea in Informatica Calcolo Numerico Prof.ssa L. D Amore 12 Dicembre 2008 Esercizi di riepilogo tipo prova d esame 1. Si consideri il sistema aritmetico f. p. a precisione
MATLAB c. Lucia Gastaldi Dipartimento di Matematica Lezione 4 (15 ottobre 2003)
") MATLAB c M-file. Lucia Gastaldi Dipartimento di Matematica http://dm.ing.unibs.it/gastaldi/ Lezione 4 (15 ottobre 2003) Esercizio Problema 3: la successione di funzioni f n (x) = (x 2 x) n per 0 x 1 è
MATLAB c M-file. Lucia Gastaldi Dipartimento di Matematica http://dm.ing.unibs.it/gastaldi/ Lezione 4 (15 ottobre 2003) Esercizio Problema 3: la successione di funzioni f n (x) = (x 2 x) n per 0 x 1 è
Raccolta di esercizi di Calcolo Numerico Prof. Michela Redivo Zaglia
 Raccolta di esercizi di Calcolo Numerico Prof. Michela Redivo Zaglia Nota Bene: Gli esercizi di questa raccolta sono solo degli esempi. Non sono stati svolti né verificati e servono unicamente da spunto
Raccolta di esercizi di Calcolo Numerico Prof. Michela Redivo Zaglia Nota Bene: Gli esercizi di questa raccolta sono solo degli esempi. Non sono stati svolti né verificati e servono unicamente da spunto
Esercizi di MatLab. Sommario Esercizi di introduzione a MatLab per il corso di Calcolo Numerico e Laboratorio, A.A
 Esercizi di MatLab Sommario Esercizi di introduzione a MatLab per il corso di Calcolo Numerico e Laboratorio, AA 2017 2018 Gli esercizi sono divisi in due gruppi: fondamentali ed avanzati I primi sono
Esercizi di MatLab Sommario Esercizi di introduzione a MatLab per il corso di Calcolo Numerico e Laboratorio, AA 2017 2018 Gli esercizi sono divisi in due gruppi: fondamentali ed avanzati I primi sono
Una Libreria di Algebra Lineare per il Calcolo Scientifico
 Una Libreria di Algebra Lineare per il Calcolo Scientifico Introduzione Il Lavoro di Tesi Introduzione al Metodo Ridurre l Occupazione di Memoria Metodo di Memorizzazione degli Elementi Risultati Attesi
Una Libreria di Algebra Lineare per il Calcolo Scientifico Introduzione Il Lavoro di Tesi Introduzione al Metodo Ridurre l Occupazione di Memoria Metodo di Memorizzazione degli Elementi Risultati Attesi
Aspetti computazionali dei metodi di Gauss e di Householder
 Aspetti computazionali dei metodi di Gauss e di Householder Dario A. Bini, Università di Pisa 20 ottobre 2014 Sommario Questo modulo didattico contiene una discussione sugli aspetti computazionali dei
Aspetti computazionali dei metodi di Gauss e di Householder Dario A. Bini, Università di Pisa 20 ottobre 2014 Sommario Questo modulo didattico contiene una discussione sugli aspetti computazionali dei
Il programma OCTAVE per l insegnamento dell algebra lineare nella Scuola Secondaria p. 1
 Il programma OCTAVE per l insegnamento dell algebra lineare nella Scuola Secondaria R. Vitolo Dipartimento di Matematica Università di Lecce SaLUG! - Salento Linux User Group Il programma OCTAVE per l
Il programma OCTAVE per l insegnamento dell algebra lineare nella Scuola Secondaria R. Vitolo Dipartimento di Matematica Università di Lecce SaLUG! - Salento Linux User Group Il programma OCTAVE per l
Metodi numerici con elementi di Programmazione A.A
 Metodi numerici con elementi di Programmazione A.A. 2013-2014 Esercizi svolti in Laboratorio Lezione del 19-11-2013 1 Docente: Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it Ufficio: Via A. Scarpa,
Metodi numerici con elementi di Programmazione A.A. 2013-2014 Esercizi svolti in Laboratorio Lezione del 19-11-2013 1 Docente: Vittoria Bruni Email: vittoria.bruni@sbai.uniroma1.it Ufficio: Via A. Scarpa,
Per esempio, una matrice 4 4 triangolare alta ha la forma. 0 a. mentre una matrice di ordine 4 triangolare bassa è del tipo
 Matrici triangolari Prima di esporre il metodo LU per la risoluzione di sistemi lineari, introduciamo la nozione di matrice triangolare Ci limiteremo al caso di matrici quadrate anche se l estensione a
Matrici triangolari Prima di esporre il metodo LU per la risoluzione di sistemi lineari, introduciamo la nozione di matrice triangolare Ci limiteremo al caso di matrici quadrate anche se l estensione a
Sistemi lineari - Parte Seconda - Esercizi
 Sistemi lineari - Parte Seconda - Esercizi Terminologia Operazioni elementari sulle righe. Equivalenza per righe. Riduzione a scala per righe. Rango di una matrice. Forma canonica per righe. Eliminazione
Sistemi lineari - Parte Seconda - Esercizi Terminologia Operazioni elementari sulle righe. Equivalenza per righe. Riduzione a scala per righe. Rango di una matrice. Forma canonica per righe. Eliminazione
Sistemi sovradeterminati
 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione lineare di
Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione lineare di
A. Quarteroni R. Sacco R Saleri MATEMATICA NUMERICA. Springer
 A. Quarteroni R. Sacco R Saleri MATEMATICA NUMERICA Springer Prefazione XIII 1. Elementi di analisi delle matrici 1 1.1 Spazi vettoriali 1 1.2 Matrici y 3 1.3 Operazioni su matrici ' 4 1.3.1 Inversa di
A. Quarteroni R. Sacco R Saleri MATEMATICA NUMERICA Springer Prefazione XIII 1. Elementi di analisi delle matrici 1 1.1 Spazi vettoriali 1 1.2 Matrici y 3 1.3 Operazioni su matrici ' 4 1.3.1 Inversa di
Esperimenti Numerici sulla fattorizzazione SVD e metodi di regolarizzazione TSVD - L-curve
 Università degli studi di Cagliari Corso di laurea Ingegneria Chimica Esperimenti Numerici sulla fattorizzazione SVD e metodi di regolarizzazione TSVD - L-curve Seminario di Algebra Lineare Numerica Professore:
Università degli studi di Cagliari Corso di laurea Ingegneria Chimica Esperimenti Numerici sulla fattorizzazione SVD e metodi di regolarizzazione TSVD - L-curve Seminario di Algebra Lineare Numerica Professore:
Esercizio 1. Esercizio 2
 Sia data la matrice A A(α) = Esercizio α 2 2α 2 2, α R.) determinare per quali valori del parametro reale α é verificata la condizione necessaria e sufficiente di convergenza per il metodo di Jacobi;.2)
Sia data la matrice A A(α) = Esercizio α 2 2α 2 2, α R.) determinare per quali valori del parametro reale α é verificata la condizione necessaria e sufficiente di convergenza per il metodo di Jacobi;.2)
Matrici di permutazione
 Matrici di permutazione Si dice matrice di permutazione elementare una matrice ottenuta dall identità scambiando due righe i e j o due colonne i e j. P ij =...... P ij ha come effetto di scambiare le righe
Matrici di permutazione Si dice matrice di permutazione elementare una matrice ottenuta dall identità scambiando due righe i e j o due colonne i e j. P ij =...... P ij ha come effetto di scambiare le righe
UNIVERSITÀ DEGLI STUDI DI PAVIA FACOLTÀ DI INGEGNERIA. Matlab: esempi ed esercizi
 UNIVERSITÀ DEGLI STUDI DI PAVIA FACOLTÀ DI INGEGNERIA Matlab: esempi ed esercizi Sommario e obiettivi Sommario Esempi di implementazioni Matlab di semplici algoritmi Analisi di codici Matlab Obiettivi
UNIVERSITÀ DEGLI STUDI DI PAVIA FACOLTÀ DI INGEGNERIA Matlab: esempi ed esercizi Sommario e obiettivi Sommario Esempi di implementazioni Matlab di semplici algoritmi Analisi di codici Matlab Obiettivi
Corso di Matematica per la Chimica
 Corso di Matematica per la Chimica Dott.ssa Maria Carmela De Bonis Dipartimento di Matematica, Informatica e Economia Università della Basilicata a.a. 2014-15 Propagazione degli errori introdotti nei dati
Corso di Matematica per la Chimica Dott.ssa Maria Carmela De Bonis Dipartimento di Matematica, Informatica e Economia Università della Basilicata a.a. 2014-15 Propagazione degli errori introdotti nei dati
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
Dott.ssa Maria Carmela De Bonis a.a. 203-4 I sistemi lineari Generalità sui sistemi lineari Molti problemi dell ingegneria, della fisica, della chimica, dell informatica e dell economia, si modellizzano
MATLAB - Programmazione - 2. Antonino Polimeno
 MATLAB - Programmazione - 2 Antonino Polimeno antonino.polimeno@unipd.it Manipolazione di matrici - 1 Input di matrici Definizione manuale: A = [1, 2, 3; 7, 8, 9] Generazione da funzioni Lettura da file
MATLAB - Programmazione - 2 Antonino Polimeno antonino.polimeno@unipd.it Manipolazione di matrici - 1 Input di matrici Definizione manuale: A = [1, 2, 3; 7, 8, 9] Generazione da funzioni Lettura da file
Università degli studi di Cagliari REGOLARIZZAZIONE TRAMITE FATTORIZZAZIONE AI VALORI SINGOLARI: TEORIA E APPLICAZIONI
 Università degli studi di Cagliari FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria Elettronica REGOLARIZZAZIONE TRAMITE FATTORIZZAZIONE AI VALORI SINGOLARI: TEORIA E APPLICAZIONI Seminario di Algebra
Università degli studi di Cagliari FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria Elettronica REGOLARIZZAZIONE TRAMITE FATTORIZZAZIONE AI VALORI SINGOLARI: TEORIA E APPLICAZIONI Seminario di Algebra
Calcolo di autovalori e autovettori
 Calcolo di autovalori e autovettori Alvise Sommariva Università degli Studi di Padova Dipartimento di Matematica 22 aprile 2013 Alvise Sommariva Calcolo di autovalori e autovettori 1/ 36 Metodo delle potenze
Calcolo di autovalori e autovettori Alvise Sommariva Università degli Studi di Padova Dipartimento di Matematica 22 aprile 2013 Alvise Sommariva Calcolo di autovalori e autovettori 1/ 36 Metodo delle potenze
Esame di Calcolo Numerico per Informatica A.A. 2010/11 Proff. S. De Marchi e M. R. Russo 20 giugno 2011
 Esame di Calcolo Numerico per Informatica A.A. 2010/11 Proff. S. De Marchi e M. R. Russo 20 giugno 2011 L esame consiste di 4 domande aperte e 10 esercizi a risposta multipla. Per gli esercizi ci sono
Esame di Calcolo Numerico per Informatica A.A. 2010/11 Proff. S. De Marchi e M. R. Russo 20 giugno 2011 L esame consiste di 4 domande aperte e 10 esercizi a risposta multipla. Per gli esercizi ci sono
Matlab. Istruzioni condizionali, cicli for e cicli while.
 Matlab. Istruzioni condizionali, cicli for e cicli while. Alvise Sommariva Università degli Studi di Padova Dipartimento di Matematica 17 marzo 2016 Alvise Sommariva Introduzione 1/ 18 Introduzione Il
Matlab. Istruzioni condizionali, cicli for e cicli while. Alvise Sommariva Università degli Studi di Padova Dipartimento di Matematica 17 marzo 2016 Alvise Sommariva Introduzione 1/ 18 Introduzione Il
Sistemi lineari. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Esercitazione 7: Fattorizzazione QR e Minimi quadrati.
 Esercitazione 7: Fattorizzazione QR e Minimi quadrati. Richiami di Teoria Teorema: Data una matrice A R m n, (m n), esiste una matrice ortogonale Q R m m (QQ T = Q T Q = I) tale che ( ) R1 A = QR = Q,
Esercitazione 7: Fattorizzazione QR e Minimi quadrati. Richiami di Teoria Teorema: Data una matrice A R m n, (m n), esiste una matrice ortogonale Q R m m (QQ T = Q T Q = I) tale che ( ) R1 A = QR = Q,
Universita degli Studi di Siena
 Universita degli Studi di Siena Facolta di Ingegneria Dispense del corso di Sistemi di Supporto alle Decisioni I L algoritmo per la risoluzione di problemi di programmazione dinamica Chiara Mocenni Corso
Universita degli Studi di Siena Facolta di Ingegneria Dispense del corso di Sistemi di Supporto alle Decisioni I L algoritmo per la risoluzione di problemi di programmazione dinamica Chiara Mocenni Corso
2 Sistemi lineari. Metodo di riduzione a scala.
 Sistemi lineari. Metodo di riduzione a scala. Esercizio.1 Utilizzando il metodo di eliminazione di Gauss, risolvere i seguenti sistemi lineari: 1. 3. x 1 x + 3x 3 = 1 x 1 x x 3 = x 1 + x + 3x 3 = 5 x 1
Sistemi lineari. Metodo di riduzione a scala. Esercizio.1 Utilizzando il metodo di eliminazione di Gauss, risolvere i seguenti sistemi lineari: 1. 3. x 1 x + 3x 3 = 1 x 1 x x 3 = x 1 + x + 3x 3 = 5 x 1
Corso di Calcolo Numerico
 Corso di Laurea in Ingegneria Gestionale Sede di Fermo Corso di 7 - CALCOLO NUMERICO CON MATRICI Richiami teorici Operazioni fondamentali Siano A = {a ij } e B = {b ij }, i = 1,..., m, j = 1,..., n due
Corso di Laurea in Ingegneria Gestionale Sede di Fermo Corso di 7 - CALCOLO NUMERICO CON MATRICI Richiami teorici Operazioni fondamentali Siano A = {a ij } e B = {b ij }, i = 1,..., m, j = 1,..., n due
Quale delle seguenti rappresentazioni del numero reale è in virgola mobile normalizzata?
 Quale delle seguenti istruzioni MATLAB esegue il calcolo del raggio spettrale di una matrice quadrata A? a. max(eig(abs(a))) b. max(abs(eig(a))) c. abs(max(eig(a))) d. max(abs(eig(a *A))) Il raggio spettrale
Quale delle seguenti istruzioni MATLAB esegue il calcolo del raggio spettrale di una matrice quadrata A? a. max(eig(abs(a))) b. max(abs(eig(a))) c. abs(max(eig(a))) d. max(abs(eig(a *A))) Il raggio spettrale
Risoluzione di sistemi lineari sparsi e di grandi dimensioni
 Risoluzione di sistemi lineari sparsi e di grandi dimensioni Un sistema lineare Ax = b con A R n n, b R n, è sparso quando il numero di elementi della matrice A diversi da zero è αn, con n α. Una caratteristica
Risoluzione di sistemi lineari sparsi e di grandi dimensioni Un sistema lineare Ax = b con A R n n, b R n, è sparso quando il numero di elementi della matrice A diversi da zero è αn, con n α. Una caratteristica
x n i sima pos. x, y = x T y = x i y i R. i=1
 1 Elementi di Algebra Lineare In questo capitolo introduttivo al corso di Calcolo Numerico per la laurea triennale in Informatica, saranno presentate una serie di definizioni e proprietà di matrici e dei
1 Elementi di Algebra Lineare In questo capitolo introduttivo al corso di Calcolo Numerico per la laurea triennale in Informatica, saranno presentate una serie di definizioni e proprietà di matrici e dei
Anno 4 Matrice inversa
 Anno 4 Matrice inversa 1 Introduzione In questa lezione parleremo della matrice inversa di una matrice quadrata: definizione metodo per individuarla Al termine della lezione sarai in grado di: descrivere
Anno 4 Matrice inversa 1 Introduzione In questa lezione parleremo della matrice inversa di una matrice quadrata: definizione metodo per individuarla Al termine della lezione sarai in grado di: descrivere
Inversa di una matrice
 Geometria Lingotto. LeLing: La matrice inversa. Ārgomenti svolti: Inversa di una matrice. Unicita e calcolo della inversa. La inversa di una matrice. Il gruppo delle matrici invertibili. Ēsercizi consigliati:
Geometria Lingotto. LeLing: La matrice inversa. Ārgomenti svolti: Inversa di una matrice. Unicita e calcolo della inversa. La inversa di una matrice. Il gruppo delle matrici invertibili. Ēsercizi consigliati:
Fattorizzazione QR con pivoting per colonne
 Fattorizzazione QR con pivoting per colonne Mele Giampaolo May 14, 211 1 Traccia Abstract Breve descrizione dell algoritmo implementato per l esame di calcolo scientifico con sperimentazione Implementare
Fattorizzazione QR con pivoting per colonne Mele Giampaolo May 14, 211 1 Traccia Abstract Breve descrizione dell algoritmo implementato per l esame di calcolo scientifico con sperimentazione Implementare
Informatica B. Facoltà di Ingegneria Industriale Laurea in Ingegneria Energetica, Meccanica e dei Trasporti. Prof. Marco Masseroli
 Facoltà di Ingegneria Industriale Laurea in Ingegneria Energetica, Meccanica e dei Trasporti Dipartimento di Elettronica e Informazione Informatica B Prof. Marco Masseroli LAB 4: MATLAB/OCTAVE ESERCIZI
Facoltà di Ingegneria Industriale Laurea in Ingegneria Energetica, Meccanica e dei Trasporti Dipartimento di Elettronica e Informazione Informatica B Prof. Marco Masseroli LAB 4: MATLAB/OCTAVE ESERCIZI
Capitolo 1. Esercizi a.a Esercizi. Esercizio 1.1 Dimostrare che il metodo iterativo. x k+1 = (x k ), k =0, 1,...,
, k =0, 1,...,") apitolo Esercizi a.a. 26-7 Esercizi Esercizio. Dimostrare che il metodo iterativo x k+ = (x k ), k =,,..., se convergente a x, deve verificare la condizione di consistenza x = (x ). Ovvero, la soluzione
apitolo Esercizi a.a. 26-7 Esercizi Esercizio. Dimostrare che il metodo iterativo x k+ = (x k ), k =,,..., se convergente a x, deve verificare la condizione di consistenza x = (x ). Ovvero, la soluzione
Laboratorio di Matlab
 Laboratorio di Matlab Alessandro Formaglio Dipartimento di Ingegneria dell Informazione, Università di Siena alex@dii.unisi.it http://www.dii.unisi.it/ control/matlab/labmatlab.html 9 Luglio 2009 DII -
Laboratorio di Matlab Alessandro Formaglio Dipartimento di Ingegneria dell Informazione, Università di Siena alex@dii.unisi.it http://www.dii.unisi.it/ control/matlab/labmatlab.html 9 Luglio 2009 DII -
Laboratorio di Analisi Numerica
 Laboratorio di Analisi Numerica Federica Piras matr. 29486 federica_piras@virgilio.it Stefano Angioni matr. 30153 stefano_angioni@tin.it Introduzione Questo lavoro rappresenta la conclusione del seminario
Laboratorio di Analisi Numerica Federica Piras matr. 29486 federica_piras@virgilio.it Stefano Angioni matr. 30153 stefano_angioni@tin.it Introduzione Questo lavoro rappresenta la conclusione del seminario
Applicazioni lineari e diagonalizzazione. Esercizi svolti
 . Applicazioni lineari Esercizi svolti. Si consideri l applicazione f : K -> K definita da f(x,y) = x + y e si stabilisca se è lineare. Non è lineare. Possibile verifica: f(,) = 4; f(,4) = 6; quindi f(,4)
. Applicazioni lineari Esercizi svolti. Si consideri l applicazione f : K -> K definita da f(x,y) = x + y e si stabilisca se è lineare. Non è lineare. Possibile verifica: f(,) = 4; f(,4) = 6; quindi f(,4)
Esercitazione di Calcolo Numerico 1 27 Maggio Calcolare la fattorizzazione P A = LU della matrice A =
 Esercitazione di Calcolo Numerico 1 27 Maggio 29 1. Calcolare la fattorizzazione P A = LU della matrice 1 2 3 A = 2 3 3, ed utilizzarla per risolvere il sistema lineare Ax = b, con b = (1, 2,, 16) T. 2.
Esercitazione di Calcolo Numerico 1 27 Maggio 29 1. Calcolare la fattorizzazione P A = LU della matrice 1 2 3 A = 2 3 3, ed utilizzarla per risolvere il sistema lineare Ax = b, con b = (1, 2,, 16) T. 2.
Risoluzione di problemi ingegneristici con Excel
 Risoluzione di problemi ingegneristici con Excel Problemi Ingegneristici Calcolare per via numerica le radici di un equazione Trovare l equazione che lega un set di dati ottenuti empiricamente (fitting
Risoluzione di problemi ingegneristici con Excel Problemi Ingegneristici Calcolare per via numerica le radici di un equazione Trovare l equazione che lega un set di dati ottenuti empiricamente (fitting
Algoritmo QR e zeri di una formula Gaussiana
 Università degli Studi di Cagliari Corso di Calcolo Numerico 2 Algoritmo QR e zeri di una formula Gaussiana Docente Prof. Rodriguez Tesina di Gianluca Pisano Anna Concas Introduzione Lo scopo di questa
Università degli Studi di Cagliari Corso di Calcolo Numerico 2 Algoritmo QR e zeri di una formula Gaussiana Docente Prof. Rodriguez Tesina di Gianluca Pisano Anna Concas Introduzione Lo scopo di questa
Teorema di Thevenin generalizzato
 Teorema di Thevenin generalizzato Si considerino due reti elettriche lineari, A e B, aventi rispettivamente N A e N B nodi interni. Esse si interfacciano attraverso n (n 3) fili di collegamento, in cui
Teorema di Thevenin generalizzato Si considerino due reti elettriche lineari, A e B, aventi rispettivamente N A e N B nodi interni. Esse si interfacciano attraverso n (n 3) fili di collegamento, in cui
Esercitazione 6: Metodi iterativi per sistemi lineari.
 Esercitazione 6: Metodi iterativi per sistemi lineari. Richiami di Teoria Iterazione di Jacobi e Gauss Seidel. I metodi iterativi sono basati sul calcolo della soluzione x del sistema lineare Ax = b come
Esercitazione 6: Metodi iterativi per sistemi lineari. Richiami di Teoria Iterazione di Jacobi e Gauss Seidel. I metodi iterativi sono basati sul calcolo della soluzione x del sistema lineare Ax = b come
MATLAB:Condizionamento Sistemi Lineari.
 1 Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari MATLAB:Condizionamento Sistemi Lineari. Innanzitutto vediamo qual è la funzione Matlab che ci permette di calcolare il
1 Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari MATLAB:Condizionamento Sistemi Lineari. Innanzitutto vediamo qual è la funzione Matlab che ci permette di calcolare il
Risoluzione di sistemi lineari: confronto fattorizzazioni
 UNIVERSITA DEGLI STUDI DI CAGLIARI FACOLTA DI INGEGNERIA Corso di Laurea in Ingegneria Elettronica Tesina di Calcolo Numerico 2 Risoluzione di sistemi lineari: confronto fattorizzazioni Prof. Giuseppe
UNIVERSITA DEGLI STUDI DI CAGLIARI FACOLTA DI INGEGNERIA Corso di Laurea in Ingegneria Elettronica Tesina di Calcolo Numerico 2 Risoluzione di sistemi lineari: confronto fattorizzazioni Prof. Giuseppe
Autovalori e autovettori
 Capitolo 3 Autovalori e autovettori 3. Richiami di teoria Prerequisiti: nozioni elementari di algebra lineare, numeri complessi. Sia A R n n. Un numero λ per cui esiste un vettore x 0 tale che valga la
Capitolo 3 Autovalori e autovettori 3. Richiami di teoria Prerequisiti: nozioni elementari di algebra lineare, numeri complessi. Sia A R n n. Un numero λ per cui esiste un vettore x 0 tale che valga la
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESERCIZI DI MATEMATICA DISCRETA ANNO 2006/2007
 ESERCIZI DI MATEMATICA DISCRETA ANNO 6/7 //7 () Ridurre la seguente matrice ad una a scala ridotta utilizzando il metodo di Gauss-Jordan. Soluzione. () Determinare quante e quali sono le matrici a scala
ESERCIZI DI MATEMATICA DISCRETA ANNO 6/7 //7 () Ridurre la seguente matrice ad una a scala ridotta utilizzando il metodo di Gauss-Jordan. Soluzione. () Determinare quante e quali sono le matrici a scala
a n i=0 F = a a n 2
 PROVA PRATICA di CALCOLO NUMERICO per Matematica Applicata e Informatica Multimediale Prof. Stefano De Marchi Verona, 22 giugno 2007 Il candidato dovrà scrivere su ogni foglio il cognome, nome, numero
PROVA PRATICA di CALCOLO NUMERICO per Matematica Applicata e Informatica Multimediale Prof. Stefano De Marchi Verona, 22 giugno 2007 Il candidato dovrà scrivere su ogni foglio il cognome, nome, numero
Prima Esercitazione: introduzione a Matlab
 Prima Esercitazione: introduzione a Matlab Esercizio Vettori e matrici in Matlab Siano A, B e C le seguenti matrici 3 ( A = 5 3 5 0 0 3, B = 6 0. Calcolare le matrici AB, BA e AB T, se possibile ) ( 0
Prima Esercitazione: introduzione a Matlab Esercizio Vettori e matrici in Matlab Siano A, B e C le seguenti matrici 3 ( A = 5 3 5 0 0 3, B = 6 0. Calcolare le matrici AB, BA e AB T, se possibile ) ( 0
FATTORIZZAZIONE QR TEORIA ED ESEMPI APPLICATIVI Marco Cappicciola
 MARCO CAPPICCIOLA - MATR. 367 CALCOLO NUMERICO 2 Indice FATTORIZZAZIONE QR TEORIA ED ESEMPI APPLICATIVI Marco Cappicciola Sommario Nella presente trattazione viene affrontato uno dei problemi tipici relativi
MARCO CAPPICCIOLA - MATR. 367 CALCOLO NUMERICO 2 Indice FATTORIZZAZIONE QR TEORIA ED ESEMPI APPLICATIVI Marco Cappicciola Sommario Nella presente trattazione viene affrontato uno dei problemi tipici relativi
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Il best fitting In molte applicazioni accade di avere una certa quantità di dati (solitamente elevata) e di voler descrivere l andamento del fenomeno che ha
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Il best fitting In molte applicazioni accade di avere una certa quantità di dati (solitamente elevata) e di voler descrivere l andamento del fenomeno che ha
Metodi iterativi per sistemi lineari
 Generare una successione di vettori Metodi iterativi per sistemi lineari convergente alla soluzione del sistema Convergenza in norma Costruzione di un metodo iterativo Per una qualche norma vettoriale
Generare una successione di vettori Metodi iterativi per sistemi lineari convergente alla soluzione del sistema Convergenza in norma Costruzione di un metodo iterativo Per una qualche norma vettoriale
Introduzione a Matlab Costruzione di Macchine 2 Prof. Sergio Baragetti
 Esercitazioni del corso di Costruzione di Macchine 2 a cura dell ing. Francesco Villa Introduzione a Matlab Costruzione di Macchine 2 Prof. Sergio Baragetti Dalmine - 27/02/2013 Introduzione a Matlab FONDAMENTI
Esercitazioni del corso di Costruzione di Macchine 2 a cura dell ing. Francesco Villa Introduzione a Matlab Costruzione di Macchine 2 Prof. Sergio Baragetti Dalmine - 27/02/2013 Introduzione a Matlab FONDAMENTI
Indice Elementi di analisi delle matrici I fondamenti della matematica numerica
 Indice 1. Elementi di analisi delle matrici 1 1.1 Spazivettoriali... 1 1.2 Matrici... 3 1.3 Operazionisumatrici... 4 1.3.1 Inversadiunamatrice... 6 1.3.2 Matricietrasformazionilineari... 7 1.4 Tracciaedeterminante...
Indice 1. Elementi di analisi delle matrici 1 1.1 Spazivettoriali... 1 1.2 Matrici... 3 1.3 Operazionisumatrici... 4 1.3.1 Inversadiunamatrice... 6 1.3.2 Matricietrasformazionilineari... 7 1.4 Tracciaedeterminante...
APPUNTI DI MODELLI NUMERICI PER I CAMPI
 APPUNTI DI MODELLI NUMERICI PER I CAMPI Giovanni Miano UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II POLO DELLE SCIENZE E DELLE TECNOLOGIE FACOLTÀ DI INGEGNERIA Indice 1. Richiami sui problemi di campo
APPUNTI DI MODELLI NUMERICI PER I CAMPI Giovanni Miano UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II POLO DELLE SCIENZE E DELLE TECNOLOGIE FACOLTÀ DI INGEGNERIA Indice 1. Richiami sui problemi di campo
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
Calcolo Numerico (A.A. 2014-2015) Lab n. 12 Approssimazione 17-12-2014
 Lab n. 12 Approssimazione 17-12-2014") Calcolo Numerico (A.A. 2014-2015) Lab n. 12 Approssimazione 17-12-2014 1 Approssimazione di dati e funzioni Problema Data la tabella {x i, y i }, i = 0,..., n, si vuole trovare una funzione analitica ϕ
Calcolo Numerico (A.A. 2014-2015) Lab n. 12 Approssimazione 17-12-2014 1 Approssimazione di dati e funzioni Problema Data la tabella {x i, y i }, i = 0,..., n, si vuole trovare una funzione analitica ϕ
Laboratorio di Calcolo Numerico
 Laboratorio di Calcolo Numerico Lezione 3 Padova, April 4th 2016 F. Piazzon Department of Mathematics. Doctoral School in Mathematical Sciences, Applied Mathematics Area Outline Lab. 3-2 of 16 1 Costrutti
Laboratorio di Calcolo Numerico Lezione 3 Padova, April 4th 2016 F. Piazzon Department of Mathematics. Doctoral School in Mathematical Sciences, Applied Mathematics Area Outline Lab. 3-2 of 16 1 Costrutti
Algoritmi per operazioni con le matrici
 Algoritmi per operazioni con le matrici 1 Sommario Definizioni Alcune operazioni principali sulle matrici Somma di due matrici Trasposta di una matrice Prodotto di matrici: algoritmo classico Prodotto
Algoritmi per operazioni con le matrici 1 Sommario Definizioni Alcune operazioni principali sulle matrici Somma di due matrici Trasposta di una matrice Prodotto di matrici: algoritmo classico Prodotto
Cambio di base. Capitolo Introduzione. 8.2 Cambio di base
 apitolo 8 ambio di base 8 Introduzione Sappiamo che, fissata una base finita in uno spazio vettoriale, ad ogni vettore sono associate le coordinate relative a tale base In questo capitolo vediamo che tali
apitolo 8 ambio di base 8 Introduzione Sappiamo che, fissata una base finita in uno spazio vettoriale, ad ogni vettore sono associate le coordinate relative a tale base In questo capitolo vediamo che tali
Modelli Matematici e Calcolo Numerico
 Modelli Matematici e Calcolo Numerico Calcolo Numerico Massimiliano Martinelli martinelli@imati.cnr.it Università di Pavia Facoltà di Ingegneria 30 Settembre - 14 Ottobre 2010 Obiettivi del corso Esempi
Modelli Matematici e Calcolo Numerico Calcolo Numerico Massimiliano Martinelli martinelli@imati.cnr.it Università di Pavia Facoltà di Ingegneria 30 Settembre - 14 Ottobre 2010 Obiettivi del corso Esempi
Corso di Analisi Numerica - AN1. Parte 2: metodi diretti per sistemi lineari. Roberto Ferretti
 Corso di Analisi Numerica - AN1 Parte 2: metodi diretti per sistemi lineari Roberto Ferretti Richiami sulle norme e sui sistemi lineari Il Metodo di Eliminazione di Gauss Il Metodo di Eliminazione con
Corso di Analisi Numerica - AN1 Parte 2: metodi diretti per sistemi lineari Roberto Ferretti Richiami sulle norme e sui sistemi lineari Il Metodo di Eliminazione di Gauss Il Metodo di Eliminazione con
Esercizi svolti. delle matrici
 Esercizi svolti. astratti. Si dica se l insieme delle coppie reali (x, y) soddisfacenti alla relazione x + y è un sottospazio vettoriale di R La risposta è sì, perchè l unica coppia reale che soddisfa
Esercizi svolti. astratti. Si dica se l insieme delle coppie reali (x, y) soddisfacenti alla relazione x + y è un sottospazio vettoriale di R La risposta è sì, perchè l unica coppia reale che soddisfa
Richiami di algebra delle matrici a valori reali
 Richiami di algebra delle matrici a valori reali Vettore v n = v 1 v 2. v n Vettore trasposto v n = (v 1, v 2,..., v n ) v n = (v 1, v 2,..., v n ) A. Pollice - Statistica Multivariata Vettore nullo o
Richiami di algebra delle matrici a valori reali Vettore v n = v 1 v 2. v n Vettore trasposto v n = (v 1, v 2,..., v n ) v n = (v 1, v 2,..., v n ) A. Pollice - Statistica Multivariata Vettore nullo o