Differenziazione sistemi dinamici
|
|
|
- Giuditta Ranieri
- 10 anni fa
- Просмотров:
Транскрипт
1 Obiettivo: analisi e sintesi dei sistemi di controllo in retroazione in cui è presente un calcolatore digitale Il controllo digitale è ampiamente usato, grazie alla diffusione di microprocessori e microcalcolatori, sia nelle applicazioni high-tech (come l automazione industriale) che per applicazioni di piccola-media taglia (automobili, robot e macchine automatiche, forni a microonde ) Differenziazione sistemi dinamici Sistemi ibridi Sistemi ad Avanzamento Temporale (SAT) Sistemi ad Eventi Discreti (SED) SAT a tempo continuo SAT a tempo discreto SED logici SED temporizzati 1
 Sistemi ad Eventi Discreti (SED) SAT a tempo continuo SAT a tempo discreto SED logici SED")
2 Schema di anello di controllo analogico r - e Amplificatore di segnale e reti correttrici Amplificatore di potenza Attuatore Sistema da controllare y Trasduttore di misura Schema di anello di controllo digitale r - e A/D Calcolatore digitale D/A Attuatore Sistema da controllare Clock (T) y Trasduttore di misura 2
 y")
3 Schema di anello di controllo digitale r A/D Calcol. digitale D/A Attuatore Sistema da controllare A/D Trasduttore di misura Segnale continuo - segnale campionato Segnale tempo continuo: la variabile tempo è definita su tutto l asse reale. ampiezza assume valori continui segnale analogico ampiezza assume insieme finito di valori segnale quantizzato a tempo continuo Segnale tempo discreto: la variabile tempo è definita su un insieme di valori discreti, tipicamente equispaziati ampiezza assume valori continui segnale a dati campionati ampiezza assume insieme finito di valori segnale digitale 3

4 Segnale continuo-campionato Analogico A dati campionati Quantizzato a tempo continuo Digitale Convertitori A/D e D/A A/D D/A 4

5 Convertitore A/D A/D Il campionamento è l operazione che, data una funzione del tempo, fornisce la successione ottenuta valutando f(t) agli istanti t k =kt dove T > 0 è un valore fissato detto periodo di campionamento Operazione di campionamento Pulsazione di campionamento Convertitori D/A D/A Genera un segnale continuo a partire dal segnale discreto Il convertitore D/A più diffuso è la Tenuta di ordine zero o Zero- Order Hold (ZOH) f(t)=f(kt) kt t < (k+1)t 5
 f(t)=f(kt)")
6 Campionatore Controllore Ricostruttore Il campionatore (Convertitore A/D) converte un segnale tempo continuo in una sequenza di campioni prelevati negli istanti t = 0, T, 2T, 3T, dove T è il passo di campionamento Il controllore digitale elabora la sequenza di valori campionati dell errore e(t) e fornisce in uscita una sequenza di valori da cui si deve generare un segnale continuo da fornire in ingresso all attuatore Il ricostruttore (Convertitore D/A) trasforma una sequenza di valori numerici in un opportuno segnale continuo e(t) e( kt ) u( kt ) u(t) A/D Controllore Ricostruttore Schema di anello di controllo digitale r - e A/D Calcolatore digitale D/A Attuatore Sistema da controllare Clock (T) y Trasduttore di misura 6
 u( kt ) u(t) A/D Controllore Ricostruttore Schema di anello di controllo digitale r - e A/D Calcolatore digitale D/A Attuatore Sistema da controllare Clock (T) y Trasduttore")
7 Controllo digitale VS Controllo analogico Vantaggi: Maggior capacità e precisione di elaborazione Maggiore flessibilità Maggiore affidabilità e ripetibilità Maggiore sensibilità e trasmissibilità dei segnali Svantaggi Progettazione più difficile ed articolata Stabilizzabilità più precaria Possibilità di arresti non previsti dovuti ai disturbi Necessità di utilizzare energia elettrica Modelli matematici Tempo Discreto Modello Implicito Ingresso-Stato-Uscita Modello Implicito Ingresso-Uscita Equazioni alle differenze 7

8 Z-Trasformata Z-Trasformata permette di passare dal dominio discreto al dominio della variabile complessa z, e viceversa. Le equazioni alle differenze vengono convertite in equazioni algebriche Z-Trasformata: Equivalente nel domini discreto della trasformata di Laplace per il tempo continuo Z-Trasformata Impulso: Gradino : Esponenziale: 8

9 Z-Trasformata Linearità: Anticipo: Ritardo: Valor finale: Valore iniziale: Convoluzione: Esempio Anti-trasforamta Antitrasformata di Le trasformate di funzioni elementari hanno z al numeratore; conviene decomporre in fratti semplici 9

10 Z-Trasformata segnale campionato Obiettivo: calcolare la Z-trasformata F(z) della successione f k ottenuta campionando con periodo T un segnale f(t) Da sviluppo in fratti semplici (F(s) con solo poli semplici) Z-Trasformata segnale campionato Se F(s) ha poli con molteplicità non unitaria DA NOTARE: per ogni polo p di F(s), la Z[F(s)] ha un polo in e pt I poli di F(s) si trasformano in poli di F(z) 10
, la Z[F(s)] ha un polo in e pt I poli di F(s) si trasformano in poli")
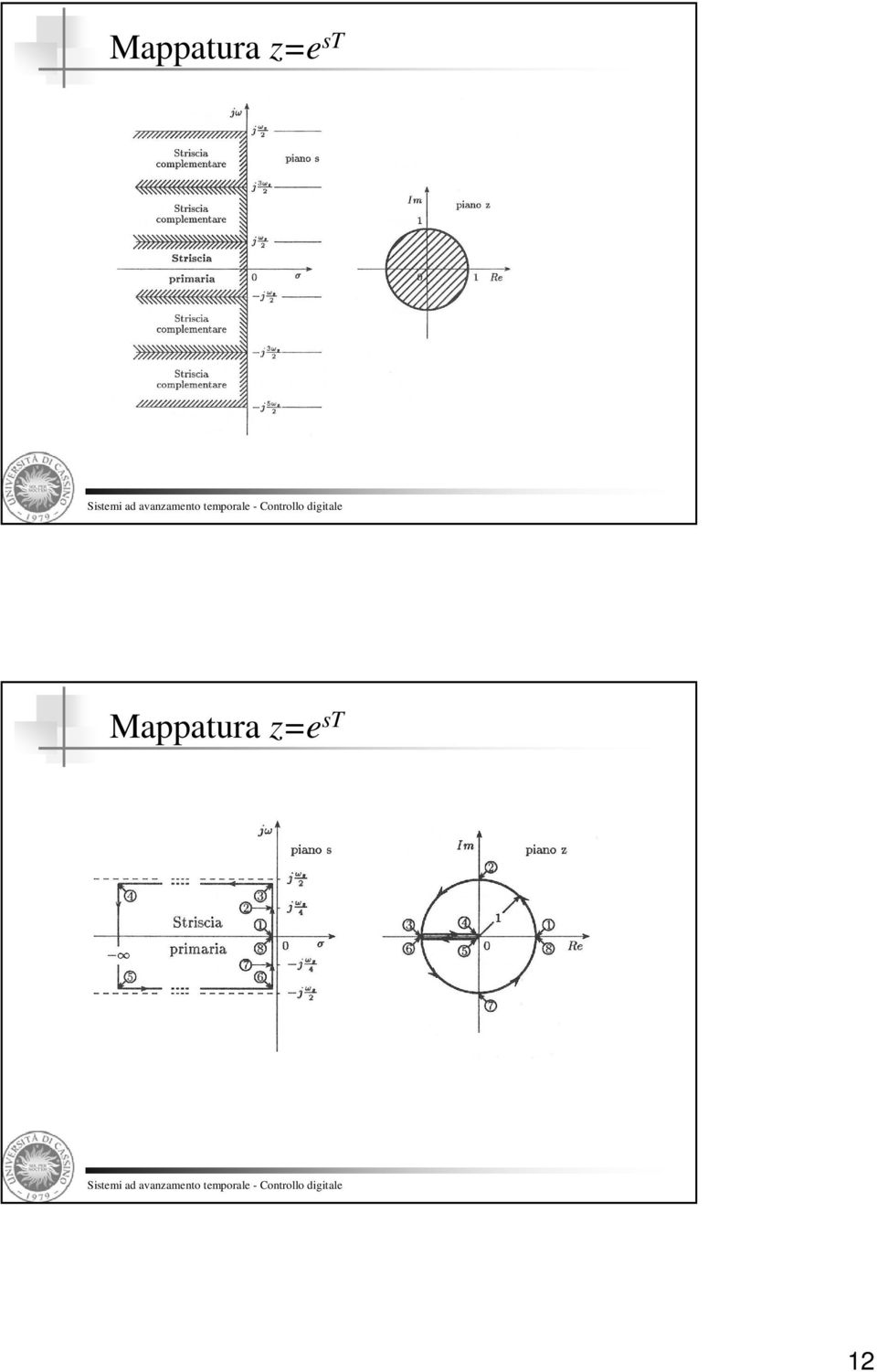
11 Mappatura z=e st Tramite la mappatura z=e st, un polo in s: si trasforma in un polo in z: Mappatura z=e st Poli compl. coniug. in s Poli compl. coniug. in z mappa z=e st biunivoca per ed è periodica di Im[s] striscia primaria asse immaginario in s cerchio di raggio unitario in z poli con s<0 z <1 rette verticali in s circonferenze in z rette orizzontali in s rette radiali in z punti in punti in 11

12 Mappatura z=e st Mappatura z=e st 12
13 Sistema II ordine tempo discreto Sistema del 2 ordine nel tempo discreto Sistema del 2 ordine in Z Evoluzione libera Evoluzione forzata Modi di evoluzione sistemi tempo discreto Evoluzione libera Poli: radici del polinomio caratteristico Modi di evoluzione: impulsivi (poli nulli) aperiodici (poli reali positivi) alternati (poli reali negativi) pseudoperiodici (coppia poli comp coniug.) 13
 alternati (poli reali negativi) pseudoperiodici (coppia poli")
14 Modi di evoluzione tempo discreto Modi di evoluzione aperiodici (poli reali positivi) k k Modi di evoluzione tempo discreto Modi di evoluzione aperiodici (poli reali positivi) k Costante di tempo discreta Il modo di evoluzione si estingue in un numero di passi dell ordine di 3-5 costanti di tempo 14

15 Modi di evoluzione tempo discreto Modi di evoluzione alternati (poli reali negativi) k k Modi di evoluzione tempo discreto Modi di evoluzione pseudoperiodici k k k 15

16 Modi di evoluzione tempo discreto Risposta del sistema- Evoluzione forzata Evoluzione forzata: Risposta ad ingressi standard: Risposta impulsiva Risposta indiciale Risposta ad ingressi polinomiali Risposta ad ingressi sinusoidali Funzione di trasferimento 16

17 Risposta indiciale Risposta indiciale W(z) Risposta armonica Funzione di risposta armonica è periodica di ν di periodo 2π Si calcola per un intervallo di pulsazioni limitato: -π<ν< π I diagrammi di Bode si disegnano solo per π/t<ω< π/t Non esistono i tracciamenti asintotici. Si disegna punto per punto. 17

18 Esempio diagrammi di Bode F=1/(z 2 -.9) con passo di campionamento T=.5 0<ν< π 0<ω< π/.5=6.28 ν=.1 ω=.1/t=.2 F(e.1j )= j F(e.1j ) =4.67=13.4dB F(e.1j )=-68 Schemi simulink sistema tempo discreto 18
 =4.67=13.4dB F(e.")
19 Stabilità sistemi tempo discreto Lo studio della stabilità di un sistema lineare stazionario si riconduce allo studio della posizione delle radici del polinomio a denominatore della funzione di trasferimento rispetto ad una regione del piano complesso. Nel caso a tempo discreto, tale regione è rappresentata dal cerchio unitario aperto. Metodi: Criterio di Jury (analogo del criterio di Routh): Trasformazione bilineare (trasformazione in s e applicazione di Routh) Criterio di Jury Criterio di Jury (analogo del criterio di Routh): Assegnato un il polinomio p(z) Il polinomio p(z) ha tutte radici con modulo strettamente minore di uno se e solo se i primi elementi delle righe di indice dispari della tabella sono tutti diversi da zero ed hanno segno positivo. 19
: Assegnato un il polinomio p(z) Il polinomio p(z) ha tutte radici con modulo strettamente minore di uno se e solo se i primi elementi delle righe di indice dispari della tabella sono")
20 Sistema a tempo discreto in retroazione Stretta analogia con il caso tempo continuo per: regole schemi a blocchi, effetto retroazione su sensibilità a variazioni parametriche, allargamento di banda, errore a regime (polo origine polo in (1,j0) ) Progetto del controllore Stabilità poli sistema ciclo chiuso a modulo<1 Precisione a regime (equivalente a tempo continuo) guadagno statico integratore con polo in z=1 (equivalente del polo s=0 in t.c. ) Risposta nel transitorio legame s-z Specifiche frequenziali e stabilità relativa Bode, Nyquist e Nichols in t.d. sono funzioni trascendenti Si progetta in s e poi si vede l equivalente in z 20

21 Progetto del controllore Sensitività parametrica guadagno d anello (equivalente t.c.) Reiezione ai disturbi integratore nel controllo assicura astatismo (equivalente t.c.) Azione di controllo si tengono in considerazione i limiti fisici degli attuatori tecniche di controllo ottimo Stabilità del sistema a ciclo chiuso Criterio di Nyquist è come per caso tempo continuo ma il diagramma è costruito come l immagine attraverso L(z) del percorso di Nyquist costituito dalla circonferenza unitaria piuttosto che dall asse immaginario. Un sistema in retroazione è asintoticamente stabile se e solo se il vettore rappresentativo del numero complesso 1+L(e jν )al variare di ν da -π a +π compie intorno al proprio punto di applicazione un numero di giri, valutati positivamente in verso antiorario, pari al numero di poli a modulo maggiore di uno della funzione di trasferimento ad anello aperto 21
22 Effetto del ritardo Tempo continuo: ritardo di L secondi Tempo discreto: ritardo di n campioni Ritardo in catena diretta t.c. Ritardo in catena diretta t.d. Effetto del ritardo sul piano di Nyquist Sfasamento aumenta al crescere di ν 22
23 Schema di anello di controllo digitale r - e A/D Calcolatore digitale D/A Attuatore Sistema da controllare Clock (T) y Trasduttore di misura Campionatore Controllore Ricostruttore Il campionatore (Convertitore A/D) converte un segnale tempo continuo in una sequenza di campioni prelevati negli istanti t = 0, T, 2T, 3T, dove T è il passo di campionamento Il controllore digitale elabora la sequenza di valori campionati dell errore e(t) e fornisce in uscita una sequenza di valori da cui si deve generare un segnale continuo da fornire in ingresso all attuatore Il ricostruttore (Convertitore D/A) trasforma una sequenza di valori numerici in un opportuno segnale continuo e(t) e(kt ) u(kt ) u(t) A/D Controllore Ricostruttore 23
24 Convertitore A/D (campionamento a impulsi) A/D Il campionamento è l operazione che, data una funzione del tempo, fornisce la successione ottenuta valutando f(t) agli istanti t k =kt dove T > 0 è un valore fissato detto periodo di campionamento Operazione di campionamento Pulsazione di campionamento Richiami impulso di Dirac (o delta di Dirac) Il delta di Dirac è una distribuzione che soddisfa le proprietà: Trasformata di Lapace 24
25 Modellazione campionamento ad impulsi Si consideri un segnale a tempo continuo f(t) ed il segnale f * (t) che si ottiene modulando f(t) per una portante impulsiva δ T (t) costituita da un treno di impulsi di Dirac attivi agli istanti t=kt Modellazione campionamento ad impulsi La trasformata di Laplace del segnale f * (t) si ottiene: 25
26 Convertitori D/A (ricostruttore) D/A Genera un segnale continuo a partire dal segnale discreto Il convertitore D/A più diffuso è la Tenuta di ordine zero o Zero- Order Hold (ZOH) f(t)=f(kt) kt t < (k+1)t Modello della conversione D/A con ZOH Lo ZOH può essere modellato come un sistema lineare stazionario descritto da una funzione di trasferimento la cui risposta impulsiva è si supponga di eccitare questo sistema con il segnale f (t) modulato impulsivamente che rappresenta una certa sequenza f k pari alla versione ricostruita con ZOH della sequenza f k 26
27 Modello della conversione D/A con ZOH Nel modello a modulazione impulsiva, il segnale f h (t) che si ottiene ricostruendo f k con ZOH può essere rappresentato come il segnale impulsivo f (t) filtrato dal sistema lineare la cui risposta impulsiva è g ZOH (t) Lo ZOH può essere modellato come un sistema lineare con funzione di trasferimento La trasformata di Laplace del segnale ricostruito è data da Modello della conversione D/A con ZOH Risposta armonica della ZOH è data da dove sinc(x)= sin(x)/x Risposta in frequenza di TG(jω) per T=0.01 N.B. La conversione digitale-analogico mediante ZOH introduce un ritardo pari a T/2 e una distorsione in ampiezza. 27
28 Modello della funzione di trasferimento t.d. Modello di un sistema t.d. con ingresso u k, uscita y k e funzione di trasferimento G(z) Per calcolare la f.d.t. G * (s) partiamo da e sostituiamo z=e st con Modelli di sistemi interconnessi Anello di controllo digitale Anello di controllo digitale: modello a modulazione impulsiva 28
29 Modelli di sistemi interconnessi Esempio 1 Esempio 2 Il campionamento della convoluzione di due segnali continui non è uguale alla convoluzione discreta dei campioni dei singoli segnali Analisi sistemi a dati campionati Dato un sistema di controllo digitale in retroazione, o comunque un sistema interconnesso in cui sono presenti elementi a tempo discreto, elementi a tempo continuo e campionatori/mantenitori, si desidera calcolare l espressione della risposta in tutti i segnali (continui e discreti) del sistema, noti gli ingressi calcolare, quando è possibile, le funzioni di trasferimento a tempo discreto tra i segnali d ingresso, campionati, ed i segnali di uscita, anch essi campionati In un sistema in cui siano presenti segnali a tempo continuo e segnali campionati, non è possibile in generale determinare la funzione di trasferimento a tempo continuo tra eventuali segnali di ingresso continui ed eventuali segnali di uscita continui. Le relazioni che legano questi segnali sono infatti in genere non stazionarie (tempo varianti) e quindi non esprimibili come funzioni di trasferimento. 29
30 Sistema t.c. interfacciato a dispositivo digitale Impulsiva si porta fuori da [] * Anello di controllo digitale Posso studiare alcuni problemi di controllo nel tempo discreto elaborando la P d (z)
31 Anello di controllo digitale Posso studiare alcuni problemi di controllo nel tempo discreto elaborando la P d (z) Aliasing L Aliasing (dal latino alias, altrove) è il fenomeno per il quale due segnali analogici diversi possono diventare indistinguibili una volta campionati Causa: mediante il campionamento, si generano nuove componenti spettrali (armoniche) alla stessa frequenza della componente spettrale di partenza. Tali armoniche impediscono la corretta ricostruzione del segnale Quando il segnale da ricostruire ha un contenuto informativo significativo oltre la frequenza ω s /2 la replica in frequenza causa una sovrapposizione di queste bande con quelle a bassa frequenza causando così la perdita di informazione del segnale stesso. 31
32 Aliasing Se il segnale analogico ha delle componenti centrate in kω s queste componenti vengono perse nel campionamento; cioè, non sono visibili dai dati digitali. Si parla quindi di oscillazioni nascoste sin(ω 2 t+θ) sin( (ω 2 +ω s n) t +θ) Spettro di Fourier di un segnale Lo spettro (trasformata) di Fourier di un segnale f(t) è una funzione F(jω) : R C definita Per segnali tali che f(t) = 0 t < 0, lo spettro F(jω) coincide con la trasformata di Laplace F(s) del segnale valutata sull asse immaginario, i.e. per s = jω, ω R. Sotto ipotesi opportune, la trasformata di Fourier determina univocamente il segnale, Antri-trasformata di Fourier 32
33 Spettro di Fourier di un segnale Se si suppone che f(t) sia un segnale reale Il segnale f(t) risulta quindi dalla sommatoria integrale rispetto a ω di sinusoidi infinitesime di pulsazione ω ed ampiezza F(jω) dω. Il modulo dello spettro di Fourier, F(jω), può essere interpretato come densità di ampiezza (rispetto a ω) del continuo di sinusoidi che compongono f(t) ed è detto contenuto frequenziale o spettro di ampiezza di f(t). Spettro di un segnale campionato Si consideri la sequenza f k = f(kt) che risulta dal campionamento con periodo T di un segnale continuo f(t) nullo per t < 0, ed il segnale a modulazione impulsiva f (t) equivalente a f k. Sviluppando in serie complessa di Fourier il segnale periodico si ottiene il segnale 33
34 Spettro di un segnale campionato Tra la trasformata di Laplace F(s) di un segnale f(t) nullo per t < 0 e la trasformata di Laplace F (s) di f (t) sussiste la relazione Poiché f * (t)=0 per t<0 Si noti come l andamento dello spettro del segnale f (t) sia costituito da infinite repliche (alias) dello spettro del segnale originale f(t) spaziate tra loro della pulsazione di campionamento ω s e scalate di un fattore 1/T. Spettro di ampiezza di un segnale campionato Spettro di ampiezza di un segnale f(t) e spettro di ampiezza del segnale campionato equivalente f * (t) 34
35 Modello del ricostruttore ideale Si consideri un segnale f(t) a banda limitata, il cui spettro di ampiezza sia nullo per ω > ω f dove ω f è un dato valore. Data la sequenza f k = f(kt) di campioni di f(t), si considera il problema di ricostruire, se possibile, il segnale originale f(t) a partire da f k. Data la forma dello spettro del segnale impulsivo f (t), si osserva che lo spettro di f(t) può essere ricostituito a partire da quello di f (t) mediante un operazione ideale di filtraggio passa-basso che (a parte un fattore d ampiezza T) elimini il contenuto frequenziale di f (t) esterno alla pulsazione Tale operazione equivale ad elaborare f (t) attraverso un filtro la cui risposta in frequenza sia Modello del ricostruttore ideale L operazione precedente può dare due esiti diversi a seconda della relazione che esiste tra la pulsazione di taglio ω N del filtro e la banda ω f del segnale f(t): se ω N > ω f, il filtro rivela lo spettro corretto del segnale originale se ω N < ω f, il filtro isola lo spettro del segnale originale sovrapposto a componenti spurie dovute alle repliche 35
36 Teorema di Shannon Dato un segnale f(t) a banda limitata ω f (F(jω)=0 ω >ω f ) esso è ricostruibile a partire dalla sequenza di campioni f k =f(kt) se e solo se risulta ω f < ω N. Il segnale risulta essere: Il segnale analogico può essere ricostruito dai suoi campioni se la pulsazione di campionamento ω s è almeno pari al doppio della pulsazione più alta del segnale Teorema di Shannon Il teorema di Shannon richiede che la banda del segnale sia strettamente inferiore della pulsazione di Nyquist Nessun segnale reale ha banda finita, quindi, il fenomeno dell aliasing, per quanto attenuato, è sempre presente Un modo per ovviare in parte a questo problema è quello di porre un prefiltro analogico passa-basso sul segnale prima che venga campionato. La banda del pre-filtro (anti-aliasing) è inferiore a ω N 36
37 Esempio numerico Shannon Si supponga di campionare una sinusoide a 1 Hz affetta da rumore a 60 Hz con frequenza f s = 28 Hz. Prefiltrando il segnale con un passa-basso che taglia alla frequenza di 3.2 Hz Progetto della legge di controllo digitale Metodo indiretto (o per discretizzazione) Progetto preliminare del regolatore nel dominio di Laplace Successiva trasformazione per discretizzazione nel digitale Metodo diretto Calcolo dell equivalente discreto del processo. Dato P(s) trovo P d (z) nel dominio della trasformata Z Progetto il controllore direttamente in Z (piano w,luogo radici, metodi analitici) Regolatori a struttura fissa PID 37
38 Progetto per discretizzazione Dato un impianto lineare stazionario P(s), si supponga di aver progettato un regolatore analogico C(s) a fronte di opportune specifiche Vogliamo approssimare le caratteristiche dinamiche di C(s) con un regolatore a tempo discreto C(z) in modo che, una volta inserito C(z) nell anello di controllo digitale, si ottengano prestazioni del sistema analoghe a quelle del corrispondente sistema di controllo analogico Progetto per discretizzazione Il regolatore digitale ottenuto per discretizzazione introduce variazioni delle prestazioni del sistema in retroazione che dipendono dal passo di campionamento e dalla tecnica di discretizzazione utilizzata Si cerca di fare la discretizzazione in modo che specifiche temporali e frequenziali si discostino poco da quelle originali Può essere utile mantenere: numero poli e zeri, andamento della risposta impulsiva o gradino, guadagno statico, margini fase ed ampiezza, banda passante Non tutte le specifiche possono essere mantenute inalterate 38
39 Progetto per discretizzazione Definito il regolatore C(s) la tecnica di progetto consiste in: Definizione del periodo di campionamento e verifica che l inserimento di campionatore/ricostruttore non destabilizzi il sistema; Discretizzazione della C(s) con una delle tecniche di discretizzazione Verifica del comportamento dinamico del sistema con controllore discreto. Discretizzo il processo (calcolando la P d (z)) e verifico la risposta con C d (z) Da notare che nel progetto della C(s) si deve considerare il ritardo introdotto dal ricostruttore Progetto per discretizzazione Si consideri un controllore lineare a tempo continuo che rappresenta l equazione differenziale In digitale, l equazione differenziale deve essere approssimata con una equazione alle differenze e quindi dalla funzione di trasferimento in Z 39
40 Metodi di discretizzazione Esistono diversi metodi di discretizzazione: Metodo delle differenze all indietro (Eulero all indietro) Metodo delle differenze in avanti (Eulero in avanti) Trasformazione bilineare Trasformazione bilineare con precompensazione frequenziale Invarianza della risposta all impulso Invarianza della risposta al gradino Corrispondenza poli-zeri Nei primi 4 si approssima l operatore integratore con un equivalente discreto. Nella 5-6 la risposta ad un particolare ingresso del controllore discreto approssima quella del controllore analogico. Metodo delle differenze all indietro Derivato da metodo usato per il calcolo approssimato dell integrale di una funzione e(t) conoscendo la funzione integranda in un insieme discreto di punti t = kt. Sia consideri la funzione integrale di e(t) La relazione tra i(t) ed e(t) può essere espressa con la trasformata di Laplace nel seguente modo 40
41 Metodo delle differenze all indietro L operatore integrale è approssimato come: Metodo delle differenze all indietro In base alla relazione i poli stabili in s (Re(s)<0) si trasformano in: 41
42 Metodo delle differenze in avanti L operatore integrale è approssimato come: Metodo delle differenze in avanti In base alla relazione i poli stabili in s (Re(s)<0) si trasformano in Re(z)<1 42
43 Trasformazione bilineare (Tustin) L operatore integrale è approssimato come: Trasformazione bilineare In base alla relazione i poli stabili in s (Re(s)<0) si trasformano in z <1: 43
44 Mappatura dei poli Eulero all indietro Eulero in avanti Tustin Eulero in avanti mappa una parte del semipiano sinistro in s in punti esterni alla circonferenza unitaria in z. A seconda del passo di campionamento, C(s) con poli tutti stabili può venire approssimato con un C(z) che ha poli instabili. Eulero all indietro mappa la regione stabile nel continuo in un sottoinsieme della regione stabile nel discreto Con Tustin le regioni di stabilità continua e discreta vengono mappate l una sull altra Tustin con precompensazione frequenziale Tustin non genera sovrapposizioni frequenziali (come con z=e st ) ma compressione alle alte frequenze Per conservare la risposta in frequenza del controllore alla pulsazione di attraversamento, si introduce la trasformazione di Tustin modificata (con prewarping, o predistorsione in frequenza). 44
45 Tustin con precompensazione frequenziale Tustin modificata (con prewarping, o predistorsione in frequenza): permette di conservare la pulsazione di attraversamento ed il margine di fase del guadagno di anello e dunque, auspicabilmente, anche le caratteristiche del transitorio del sistema ad anello chiuso. Invarianza della risposta all impulso/gradino Invarianza risposta all impulso Invarianza risposta al gradino 45
46 Mappatura poli zeri (MPZ) Basata sull osservazione, assolutamente empirica, che le tecniche di approssimazione già analizzate (ad es. Tustin) trasformano sia i poli sia gli zeri del controllore da continuo a discreto secondo leggi che approssimano la nota relazione z=e st. La tecnica MPZ prevede il calcolo di un controllore C(z) che abbia come zeri e poli rispettivamente gli zeri e i poli di C(s) trasformati esattamente secondo z=e st. Procedura MPZ Si parte da C(s) in forma fattorizzata Si trasformano poli e zeri secondo z=e st Si introducono zeri in z=-1 quanti sono gli eccessi poli zeri al finito di C(s) Si compensa il guadagno alle basse o alle alte frequenze 46
47 Realizzazione e passo di campionamento La scelta del passo di campionamento deve essere fatta in modo da degradare il meno possibile le prestazioni del controllore Tempo di elaborazione Tempo di campionamento Frequenza di campionamento verifichi il Teorema di Shannon Il ricostruttore introduce un ritardo ω s >10ω B Altri problemi di realizzazione: Quantizzazione Filtro antialiasing Rappresentazione dati in precisione finita 47
Controlli Automatici prof. M. Indri Sistemi di controllo digitali
 Controlli Automatici prof. M. Indri Sistemi di controllo digitali Schema di controllo base r(t) + e(t) {e k } {u k } u(t) Campionatore (A/D) Controllore digitale Ricostruttore (D/A) Sistema (tempo cont.)
Controlli Automatici prof. M. Indri Sistemi di controllo digitali Schema di controllo base r(t) + e(t) {e k } {u k } u(t) Campionatore (A/D) Controllore digitale Ricostruttore (D/A) Sistema (tempo cont.)
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL:
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
13-1 SISTEMI A DATI CAMPIONATI: INTRODUZIONE. y(t) TMP. y k. Trasduttore. Schema di base di un sistema di controllo digitale
 TMP. y k. Trasduttore. Schema di base di un sistema di controllo digitale") SISTEMI A DATI CAMPIONATI: INTRODUZIONE + e k u k u(t) r k C D/A P y k TMP A/D Trasduttore y(t) Schema di base di un sistema di controllo digitale A/D: convertitore analogico digitale C: controllore digitale
SISTEMI A DATI CAMPIONATI: INTRODUZIONE + e k u k u(t) r k C D/A P y k TMP A/D Trasduttore y(t) Schema di base di un sistema di controllo digitale A/D: convertitore analogico digitale C: controllore digitale
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it [email protected] via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it [email protected] via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Differenziazione sistemi dinamici
 Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. 1
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Analisi dei sistemi di controllo a segnali campionati
 Analisi dei sistemi di controllo a segnali campionati Sistemi di controllo (già analizzati) Tempo continuo (trasformata di Laplace / analisi in frequenza) C(s) controllore analogico impianto attuatori
Analisi dei sistemi di controllo a segnali campionati Sistemi di controllo (già analizzati) Tempo continuo (trasformata di Laplace / analisi in frequenza) C(s) controllore analogico impianto attuatori
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected]
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected]
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
Il Campionameto dei segnali e la loro rappresentazione. 1 e prende il nome frequenza di
 Il Campionameto dei segnali e la loro rappresentazione Il campionamento consente, partendo da un segnale a tempo continuo ovvero che fluisce con continuità nel tempo, di ottenere un segnale a tempo discreto,
Il Campionameto dei segnali e la loro rappresentazione Il campionamento consente, partendo da un segnale a tempo continuo ovvero che fluisce con continuità nel tempo, di ottenere un segnale a tempo discreto,
Introduzione al Campionamento e
 Introduzione al Campionamento e all analisi analisi in frequenza Presentazione basata sul Cap.V di Introduction of Engineering Experimentation, A.J.Wheeler, A.R.Ganj, Prentice Hall Campionamento L'utilizzo
Introduzione al Campionamento e all analisi analisi in frequenza Presentazione basata sul Cap.V di Introduction of Engineering Experimentation, A.J.Wheeler, A.R.Ganj, Prentice Hall Campionamento L'utilizzo
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
Cristian Secchi Pag. 1
 CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel. 0522 522235 e-mail: [email protected] http://www.dismi.unimo.it/members/csecchi Richiami di Controlli
CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel. 0522 522235 e-mail: [email protected] http://www.dismi.unimo.it/members/csecchi Richiami di Controlli
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Università degli Studi di Cassino e del Lazio Meridionale. Area Didattica di Ingegneria. Corso di Laurea in Ingegneria Industriale
 Università degli Studi di Cassino e del Lazio Meridionale Area Didattica di Ingegneria Corso di Laurea in Ingegneria Industriale Lezioni del Corso di Misure Industriali 1 Università degli Studi di Cassino
Università degli Studi di Cassino e del Lazio Meridionale Area Didattica di Ingegneria Corso di Laurea in Ingegneria Industriale Lezioni del Corso di Misure Industriali 1 Università degli Studi di Cassino
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected] pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected] pag. 1
Cristian Secchi Pag. 1
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: [email protected]
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: [email protected]
Fondamenti di Automatica. Unità 2 Calcolo del movimento di sistemi dinamici LTI
 Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Funzioni di trasferimento. Lezione 14 2
 Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Elementi di teoria dei segnali /b
 Elementi di teoria dei segnali /b VERSIONE 29.4.01 Filtri e larghezza di banda dei canali Digitalizzazione e teorema del campionamento Capacità di canale e larghezza di banda Multiplexing e modulazioni
Elementi di teoria dei segnali /b VERSIONE 29.4.01 Filtri e larghezza di banda dei canali Digitalizzazione e teorema del campionamento Capacità di canale e larghezza di banda Multiplexing e modulazioni
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Segnali e Sistemi. Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici. Gianni Borghesan e Giovanni Marro
 Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Trasformate di Laplace
 TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia [email protected] Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia [email protected] Piero Malcovati
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
IL FILTRAGGIO DEL SEGNALE
 CAPITOLO 4 IL FILTRAGGIO DEL SEGNALE 4.1 - SISTEMA LINEARE NON DISTORCENTE E un sistema lineare che restituisce in uscita una replica indistorta del segnale di entrata, intendendo x(t) y(t) = Ax(t-t 0
CAPITOLO 4 IL FILTRAGGIO DEL SEGNALE 4.1 - SISTEMA LINEARE NON DISTORCENTE E un sistema lineare che restituisce in uscita una replica indistorta del segnale di entrata, intendendo x(t) y(t) = Ax(t-t 0
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Considerazioni sulle specifiche.
 # SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
# SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
Sistema dinamico a tempo continuo
 Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Revisione dei concetti fondamentali dell analisi in frequenza
 Revisione dei concetti fondamentali dell analisi in frequenza rgomenti: trasformazione in frequenza: significato e funzionamento; schemi di rappresentazione; trasformata discreta. 1 Rappresentazione dei
Revisione dei concetti fondamentali dell analisi in frequenza rgomenti: trasformazione in frequenza: significato e funzionamento; schemi di rappresentazione; trasformata discreta. 1 Rappresentazione dei
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [[email protected]]
![Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]](/thumbs/24/2724545.jpg "Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]") Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [[email protected]] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [[email protected]] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
ENS - Prima prova in itinere del 07 Maggio 2010
 ENS - Prima prova in itinere del 07 Maggio 0 L allievo é invitato a dare una ragionata e succinta risposta a tutti gli argomenti proposti, per dimostrare il livello di preparazione globale. I calcoli devono
ENS - Prima prova in itinere del 07 Maggio 0 L allievo é invitato a dare una ragionata e succinta risposta a tutti gli argomenti proposti, per dimostrare il livello di preparazione globale. I calcoli devono
DISCRETIZZAZIONE DI UN SEGNALE ANALOGICO:
 DISCRETIZZAZIONE DI UN SEGNALE ANALOGICO: nel processo di digitalizzazione che permette di convertire un segnale analogico in modo da poterlo elaborare con dispositivi numerici di calcolo, si operano due
DISCRETIZZAZIONE DI UN SEGNALE ANALOGICO: nel processo di digitalizzazione che permette di convertire un segnale analogico in modo da poterlo elaborare con dispositivi numerici di calcolo, si operano due
analisi di sistemi retroazionati (2)
") : analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano [email protected] Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
: analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano [email protected] Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Il luogo delle radici (ver. 1.0)
") Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: [email protected]
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: [email protected]
( x) ( x) 0. Equazioni irrazionali
 ( x) 0. Equazioni irrazionali") Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza [email protected] Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza [email protected] Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automaticih PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automatici PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA CLASSE 5H Docenti: Raviola Giovanni Moreni Riccardo Disciplina: Sistemi elettronici automatici PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE FINALI Al termine
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Elettronica e Telecomunicazioni Classe Quinta. La trasformata di Laplace
 Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
SISTEMI DI ACQUISIZIONE
 SISTEMI DI ACQUISIZIONE Introduzione Lo scopo dei sistemi di acquisizione dati è quello di controllo delle grandezze fisiche sia nella ricerca pura, nelle aziende e, per i piccoli utenti. I vantaggi sono:
SISTEMI DI ACQUISIZIONE Introduzione Lo scopo dei sistemi di acquisizione dati è quello di controllo delle grandezze fisiche sia nella ricerca pura, nelle aziende e, per i piccoli utenti. I vantaggi sono:
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016
 ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
ISTITUTO D ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: Sistemi automatici Docenti: Linguanti Vincenzo Gasco Giovanni PROGETTAZIONE DIDATTICA ANNUALE COMPETENZE
Capitolo 1 ANALISI COMPLESSA
 Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Appunti del corso di Controllo Digitale
 Università degli Studi di Siena Sede di Arezzo Corso di Laurea triennale in Ingegneria dell Automazione Appunti del corso di Controllo Digitale A cura di Gianni Bianchini Indice Glossario, abbreviazioni
Università degli Studi di Siena Sede di Arezzo Corso di Laurea triennale in Ingegneria dell Automazione Appunti del corso di Controllo Digitale A cura di Gianni Bianchini Indice Glossario, abbreviazioni
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Rappresentazione nello spazio degli stati
 Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
v in v out x c1 (t) Molt. di N.L. H(f) n
 Molt. di N.L. H(f) n") Comunicazioni elettriche A - Prof. Giulio Colavolpe Compito n. 3 3.1 Lo schema di Fig. 1 è un modulatore FM (a banda larga). L oscillatore che genera la portante per il modulatore FM e per la conversione
Comunicazioni elettriche A - Prof. Giulio Colavolpe Compito n. 3 3.1 Lo schema di Fig. 1 è un modulatore FM (a banda larga). L oscillatore che genera la portante per il modulatore FM e per la conversione
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
GRANDEZZE SINUSOIDALI
 GRANDEE SINUSOIDALI INDICE -Grandezze variabili. -Grandezze periodiche. 3-Parametri delle grandezze periodiche. 4-Grandezze alternate. 5-Grandezze sinusoidali. 6-Parametri delle grandezze sinusoidali.
GRANDEE SINUSOIDALI INDICE -Grandezze variabili. -Grandezze periodiche. 3-Parametri delle grandezze periodiche. 4-Grandezze alternate. 5-Grandezze sinusoidali. 6-Parametri delle grandezze sinusoidali.
COMPITO DI SEGNALI E SISTEMI 18 Dicembre 2004
 COMPIO DI SEGNALI E SISEMI 8 Dicembre 4 Esercizio Si consideri il modello di stato a tempo discreto descritto dalle seguenti equazioni: x(k + = Ax(k + Bu(k = x(k + u(k, v(k = Cx(k = [ ] x(k, k Z + i Si
COMPIO DI SEGNALI E SISEMI 8 Dicembre 4 Esercizio Si consideri il modello di stato a tempo discreto descritto dalle seguenti equazioni: x(k + = Ax(k + Bu(k = x(k + u(k, v(k = Cx(k = [ ] x(k, k Z + i Si
Analisi dei segnali nel dominio della frequenza
 Laboratorio di Telecomunicazioni - a.a. 2010/2011 Lezione n. 7 Analisi dei segnali nel dominio della frequenza docente L.Verdoliva In questa lezione affrontiamo il problema dell analisi dei segnali tempo
Laboratorio di Telecomunicazioni - a.a. 2010/2011 Lezione n. 7 Analisi dei segnali nel dominio della frequenza docente L.Verdoliva In questa lezione affrontiamo il problema dell analisi dei segnali tempo
STRUMENTAZIONE E MISURE ELETTRICHE. Condizionamento ed acquisizione del segnale
 STRUMENTAZIONE E MISURE ELETTRICHE Condizionamento ed acquisizione del segnale Prof. Salvatore Nuccio [email protected], tel.: 0916615270 1 Circuito di condizionamento Un sensore/trasduttore (S/T)
STRUMENTAZIONE E MISURE ELETTRICHE Condizionamento ed acquisizione del segnale Prof. Salvatore Nuccio [email protected], tel.: 0916615270 1 Circuito di condizionamento Un sensore/trasduttore (S/T)
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
Descrizione del funzionamento di un Lock-in Amplifier
 Descrizione del funzionamento di un Lock-in Amplifier S.C. 0 luglio 004 1 Propositi di un amplificatore Lock-in Il Lock-in Amplifier é uno strumento che permette di misurare l ampiezza V 0 di una tensione
Descrizione del funzionamento di un Lock-in Amplifier S.C. 0 luglio 004 1 Propositi di un amplificatore Lock-in Il Lock-in Amplifier é uno strumento che permette di misurare l ampiezza V 0 di una tensione
Analisi Mat. 1 - Ing. Inform. - Soluzioni del compito del 23-3-06
 Analisi Mat. - Ing. Inform. - Soluzioni del compito del 3-3-6 Sia p il polinomio di quarto grado definito da pz = z 4. Sia S il settore circolare formato dai numeri complessi che hanno modulo minore o
Analisi Mat. - Ing. Inform. - Soluzioni del compito del 3-3-6 Sia p il polinomio di quarto grado definito da pz = z 4. Sia S il settore circolare formato dai numeri complessi che hanno modulo minore o
Corso di Fondamenti di Segnali e Trasmissione - Appello del 07 Settembre 2005
 Corso di Fondamenti di Segnali e Trasmissione - Appello del 07 Settembre 2005 Gli esercizi devono essere risolti solo sui fogli dei colori indicati Per esiti e soluzioni si veda il sito web del corso:
Corso di Fondamenti di Segnali e Trasmissione - Appello del 07 Settembre 2005 Gli esercizi devono essere risolti solo sui fogli dei colori indicati Per esiti e soluzioni si veda il sito web del corso:
PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso
 PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso Prof. Bruno Picasso LEZIONI: Introduzione al corso. Introduzione ai sistemi dinamici. I sistemi dinamici come sistemi di equazioni differenziali; variabili
PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso Prof. Bruno Picasso LEZIONI: Introduzione al corso. Introduzione ai sistemi dinamici. I sistemi dinamici come sistemi di equazioni differenziali; variabili
LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE
 LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE MODULO : Analisi dei circuiti lineari in regime sinusoidale PREMESSA L analisi dei sistemi elettrici lineari, in regime sinusoidale, consente di determinare
LEZIONE DI ELETTRONICA per la classe 5 TIM/TSE MODULO : Analisi dei circuiti lineari in regime sinusoidale PREMESSA L analisi dei sistemi elettrici lineari, in regime sinusoidale, consente di determinare
Luigi Piroddi [email protected]
 Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi [email protected] Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi [email protected] Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Introduzione. Margine di ampiezza... 2 Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di Bode... 6
 ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ISTITUTO TECNICO INDUSTRIALE Specializzazioni: Elettronica e Telecomunicazioni Elettrotecnica - Informatica Modesto Panetti
 ISTITUTO TECNICO INDUSTRIALE Specializzazioni: Elettronica e Telecomunicazioni Elettrotecnica - Informatica Modesto Panetti BARI Via Re David 186 - Tel : 080/5425512 080/5560840 Anno Scolastico : 2009/2010
ISTITUTO TECNICO INDUSTRIALE Specializzazioni: Elettronica e Telecomunicazioni Elettrotecnica - Informatica Modesto Panetti BARI Via Re David 186 - Tel : 080/5425512 080/5560840 Anno Scolastico : 2009/2010
Risposta temporale: esercizi
 ...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
Principali comandi MATLAB utili per il corso di Controlli Automatici
 Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
MESSA IN SCALA DI ALGORITMI DIGITALI
 Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
Diagrammi di Bode. I Diagrammi di Bode sono due: 1) il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione
 il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione") 0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
CONCETTO DI LIMITE DI UNA FUNZIONE REALE
 CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
Suono: aspetti fisici. Tutorial a cura di Aldo Torrebruno
 Suono: aspetti fisici Tutorial a cura di Aldo Torrebruno 1. Cos è il suono Il suono è generalmente prodotto dalla vibrazione di corpi elastici sottoposti ad urti o sollecitazioni (corde vocali, corde di
Suono: aspetti fisici Tutorial a cura di Aldo Torrebruno 1. Cos è il suono Il suono è generalmente prodotto dalla vibrazione di corpi elastici sottoposti ad urti o sollecitazioni (corde vocali, corde di
CONVERSIONE ANALOGICA DIGITALE (ADC)(A/D) CONVERSIONE DIGITALE ANALOGICA (DAC)(D/A)
(A/D) CONVERSIONE DIGITALE ANALOGICA (DAC)(D/A)") CONVERSIONE ANALOGICA DIGITALE (ADC)(A/D) CONVERSIONE DIGITALE ANALOGICA (DAC)(D/A) ELABORAZIONE ANALOGICA O DIGITALE DEI SEGNALI ELABORAZIONE ANALOGICA ELABORAZIONE DIGITALE Vantaggi dell elaborazione
CONVERSIONE ANALOGICA DIGITALE (ADC)(A/D) CONVERSIONE DIGITALE ANALOGICA (DAC)(D/A) ELABORAZIONE ANALOGICA O DIGITALE DEI SEGNALI ELABORAZIONE ANALOGICA ELABORAZIONE DIGITALE Vantaggi dell elaborazione
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Forma d onda rettangolare non alternativa.
 Forma d onda rettangolare non alternativa. Lo studio della forma d onda rettangolare è utile, perché consente di conoscere il contenuto armonico di un segnale digitale. FIGURA 33 Forma d onda rettangolare.
Forma d onda rettangolare non alternativa. Lo studio della forma d onda rettangolare è utile, perché consente di conoscere il contenuto armonico di un segnale digitale. FIGURA 33 Forma d onda rettangolare.
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 12 /09 /2015 Pag. 1 di 4. PROGRAMMAZIONE ANNUALE A.S. 2015 / 16 MANUTENZIONE e ASSISTENZA TECNICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 12 /09 /2015 Pag. 1 di 4 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I MECCANICA e MECCATRONICA ELETTRONICA LOGISTICA e TRASPORTI LICEO SCIENTIFICO
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 12 /09 /2015 Pag. 1 di 4 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I MECCANICA e MECCATRONICA ELETTRONICA LOGISTICA e TRASPORTI LICEO SCIENTIFICO
CURVE DI LIVELLO. Per avere informazioni sull andamento di una funzione f : D IR n IR può essere utile considerare i suoi insiemi di livello.
 CURVE DI LIVELLO Per avere informazioni sull andamento di una funzione f : D IR n IR può essere utile considerare i suoi insiemi di livello. Definizione. Si chiama insieme di livello k della funzione f
CURVE DI LIVELLO Per avere informazioni sull andamento di una funzione f : D IR n IR può essere utile considerare i suoi insiemi di livello. Definizione. Si chiama insieme di livello k della funzione f