MATLAB-SIMULINK. Simulink. Uso di Matlab Functions all interno di modelli Simulink. Ing. Alessandro Pisano.
|
|
|
- Ippolito Bianchini
- 5 anni fa
- Visualizzazioni
Transcript

1 MATLAB-SIMULINK Simulink Uso di Malab Funcions all inerno di modelli Simulink Ing. Alessandro Pisano
2 Inerpreed Malab funcions Malab funcions
3 . 3
4 4 X0=0.; Y0=0.; A=; B=; C=5; D=;
5 5 Modello in forma mariciale x y Ax Bxy Cy Dxy M M
6 6 Funcion file M_LV.m da creare nella Curren Direcory funcion [ ou ] = M_LV( in ) global A B C D X=in(); Y=in(); ou()=a*x-b*x*y; ou()=-c*y+d*x*y; end Scrip di paramerizzazione clear all global A B C D _zero=[0. 0.]; A=; B=; C=4; D=;
7 7 Malab Funcion block Malab Funcion block in Malab R03


8 8 Consene di eseguire un funcion file Malab direamene all inerno di un modello Simulink Defaul Se si fa doppio click sul blocco lo si apre nell edior
![9 Modifichiamo il file funcion [y,y] = fcn(u, u, u3) %#codegen y = sin(u)+u; y= u*u+u3 Tre ingressi e due uscie L aspeo del](/docs-images/89/97914046/images/9-0.jpg "blocco cambia e compaiono i nuovi erminali di inpu ed oupu L aspeo del blocco cambia e compaiono i nuovi erminali di inpu ed")
9 9 Modifichiamo il file funcion [y,y] = fcn(u, u, u3) %#codegen y = sin(u)+u; y= u*u+u3 Tre ingressi e due uscie L aspeo del blocco cambia e compaiono i nuovi erminali di inpu ed oupu L aspeo del blocco cambia e compaiono i nuovi erminali di inpu ed oupu
10 0 funcion [y,y] = fcn(u, u, u3) %#codegen y = sin(u)+u; y= u*u+u3 All inerno di un Malab funcion non sono visibili le variabili del workspace, neanche se uese vengono definie come globali
11 Modello preda predaore con il blocco Malab funcion
12 funcion do = fcn() %#codegen A=; B=; C=5; D=; x=(); y=(); do=[a*x-b*x*y; -C*y+D*x*y];
13 3
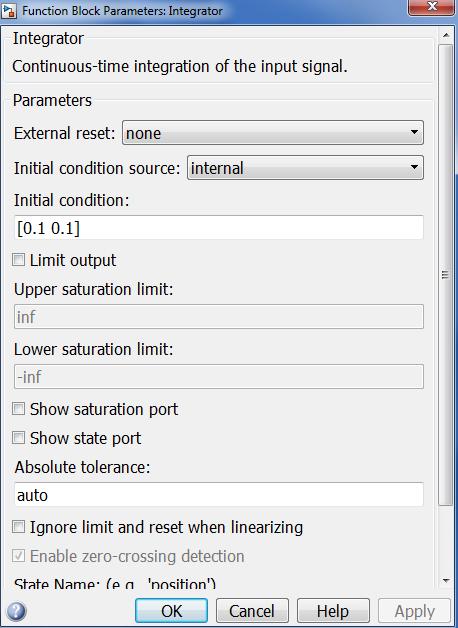
14 4 SIMULAZIONE DI MANIPOLATORI ROBOTICI Piano orizzonale m, m masse dei link l, l lunghezze dei link J, J momeni di inerzia dei link r, r coeff. di ario viscoso C(), C() coppie applicae ai giuni

15 5 Lo SCARA, acronimo di Selecive Compliance Assembly Robo Arm, è un ipo di robo indusriale, che muove un "braccio" sul piano orizzonale e una presa che può salire e scendere in uello vericale.
16 6 Modello maemaico Termini inerziali Ario viscoso Coppie applicae Coriolis e cenripee * 4 m l J m l m * 4 m l J m,,,, F innl C C R M * * * * * cos cos cos, m l m l m l m l m l m l m m M
17 7 Coppie applicae Siano le coordinae cosani di un puno di lavoro desiderao d d K K C d p d Si applichino le segueni coppie ai giuni (conrollore PD) K K C d p d d K p K, guadagni cosani K K C d d p d 0 0 r r R sin sin,,, l m l l m l F innl
18 8 M, R C C F innl,,, Veore delle variabili di giuno Veore delle coppie applicae ai giuni C C C F, C R M innl Modello veoriale in forma esplicia M F, C R innl
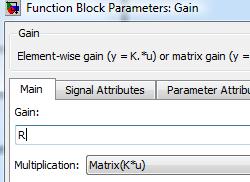
19 9 Scrip di paramerizzazione m=5; m=5; l=; l=; J=; J=; r=5; r=5; msar=0.5*m*l^+j+m*l^; msar=j+0.5*m*l^; 0=[pi/;0]; 0do=[0;0]; R=[r 0;0 r]; Kp=00; Kd=0;

20 0 M F, C R innl
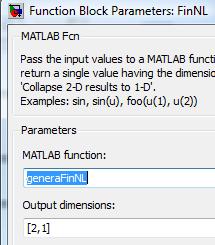
21 funcion [ ou ] = generaa( in ) m=5; m=5; l=; l=; J=; J=; msar=0.5*m*l^+j+m*l^; msar=j+0.5*m*l^; alfa=in(); bea=in(); Funcion files funcion [ ou ] = generafinnl( in ) ou(,)= msar+msar+m*l*l*cos(bea); ou(,)= msar+0.5*m*l*l*cos(bea) ; ou(,)=msar+0.5*m*l*l*cos(bea); ou(,)=msar; end m=5; m=5; l=; l=; J=; J=; msar=0.5*m*l^+j+m*l^; msar=j+0.5*m*l^; alfa=in(); bea=in(); alfado=in(3); beado=in(4); ou(,)=m*l*l*(alfado*beado+0.5*beado^)*sin(bea); ou(,)=-m*l*l*0.5*alfado^*sin(bea); end
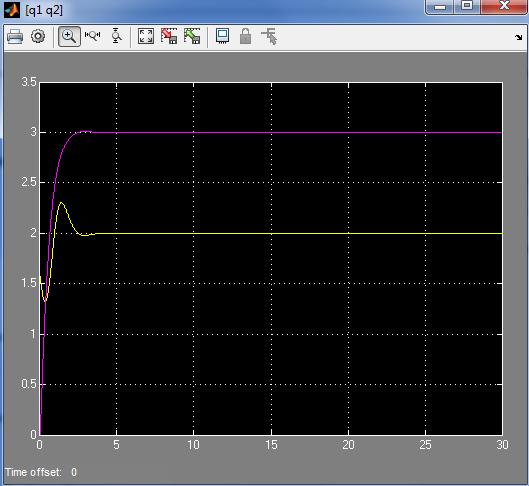
22 empo=.ime; =.daa(,:); =.daa(,:); plo(empo,,empo,),grid legend('_','_')
23 Modello compao con Embedded Malab Funcion 3
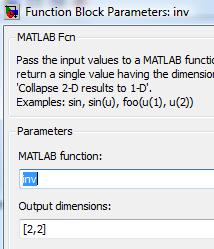
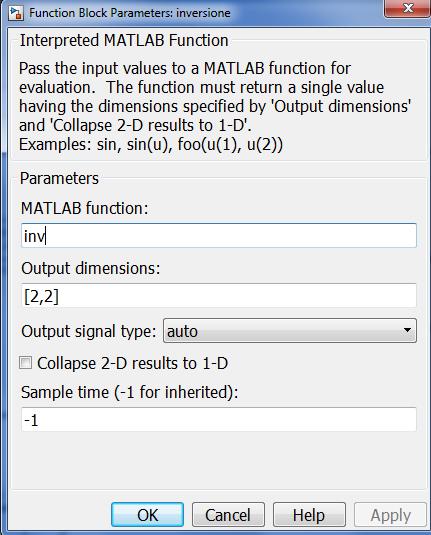
24 4 Embedded Malab Funcion funcion ddo = fcn(,do,c) %#eml m=5; m=5; l=; l=; J=; J=; msar=0.5*m*l^+j+m*l^; msar=j+0.5*m*l^; r=5; r=5; alfa=(); bea=(); alfado=do(); beado=do(); A=[msar+msar+m*l*l*cos(bea) msar+0.5*m*l*l*cos(bea); msar+0.5*m*l*l*cos(bea) msar]; FinNL=[m*l*l*(alfado*beado+0.5*beado^)*sin( bea); -m*l*l*0.5*alfado^*sin(bea)]; R=[r 0;0 r]; ddo = inv(a)*(finnl+c-r*do);
25 Manipolaore planare a gdl 5
26 6 g B M cos cos cos, I m l I m l l m l I m l l m l I l l l l m I m l M c c c c c c c c 0, h h h h B sin l m l h c cos cos cos, l l m g g m l g c c cos, g m l g c g g B M,,,,
27 7 g g B M,,,, g B M g g g g B F, F M,
28 8 M F, Modello veoriale in forma esplicia M F, Coppie applicae Siano d d le coordinae cosani di un puno di lavoro desiderao Si applichino le segueni coppie ai giuni (conrollore PD con graviy compensaion) d g K K d p K, K d p d guadagni cosani d d
29 9
30 30
31 3
32 3 funcion [ ou ] = cream( in ) m=5; m=5; l=; lc=; l=; lc=; I=; I=; =in(); =in(); ou(,)= m*lc^+i+m*(l^+lc^+*l*lc*cos())+i; ou(,)= m*l*lc*cos()+m*lc^+i; ou(,)=ou(,); ou(,)=m*lc^+i; end
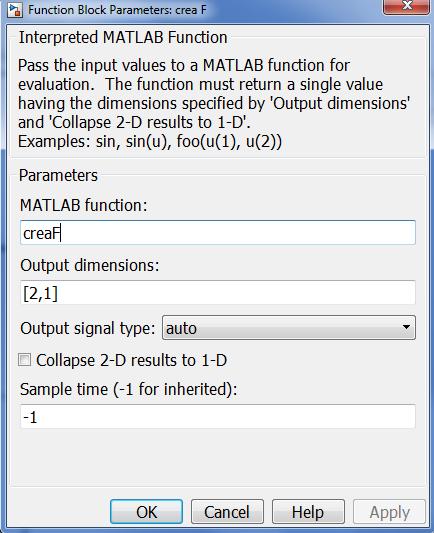
33 33 funcion [ ou ] = creaf( in ) m=5; m=5; l=; lc=; l=; lc=; J=; J=; g=9.8; =in(); =in(); do=in(3); do=in(4); do=[do;do]; h=m*l*lc*sin() B=[-h*do -h*(do+do); h*do 0]; grav=[m*lc*g*cos()+m*g*(lc*cos(+)+l*cos()); m*lc*g*cos(+)]; ou=b*do+grav; end
34 34 funcion [ ou ] = creag( in ) m=5; m=5; l=; lc=; l=; lc=; g=9.8; =in(); =in(); g=[m*lc*g*cos()+m*g*(lc*cos(+)+l*cos()); m*lc*g*cos(+)]; ou=g; end
35 35

36 36
37 37
38 38
39 39 K p x l d d x l
40 40
41 4
Lezione 2. F. Previdi - Automatica - Lez. 2 1
 Lezione 2. Sisemi i dinamici i i a empo coninuo F. Previdi - Auomaica - Lez. 2 Schema della lezione. Cos è un sisema dinamico? 2. Modellisica dei sisemi dinamici 3. Il conceo di dinamica 4. Sisemi dinamici
Lezione 2. Sisemi i dinamici i i a empo coninuo F. Previdi - Auomaica - Lez. 2 Schema della lezione. Cos è un sisema dinamico? 2. Modellisica dei sisemi dinamici 3. Il conceo di dinamica 4. Sisemi dinamici
Simulink & grafica. Motore in corrente continua. Sottosistemi (subsystems) Maschere (mask)
 Maschere (mask)") Simulink & grafica Motore in corrente continua Sottosistemi (subsystems) Maschere (mask) Creazione di grafici in Matlab con dati generati in Simulink Gestione di modelli Simulink mediante script (funzione
Simulink & grafica Motore in corrente continua Sottosistemi (subsystems) Maschere (mask) Creazione di grafici in Matlab con dati generati in Simulink Gestione di modelli Simulink mediante script (funzione
Lezione 2. Sistemi dinamici a tempo continuo. F. Previdi - Fondamenti di Automatica - Lez. 2 1
 Leione. Sisemi dinamici a empo coninuo F. Previdi - Fondameni di Auomaica - Le. Schema della leione. Cos è un sisema dinamico?. Modelli di sisemi dinamici 3. Il conceo di dinamica 4. Variabili di sao 5.
Leione. Sisemi dinamici a empo coninuo F. Previdi - Fondameni di Auomaica - Le. Schema della leione. Cos è un sisema dinamico?. Modelli di sisemi dinamici 3. Il conceo di dinamica 4. Variabili di sao 5.
Controllo del pendolo inverso
 Capiolo. INTRODUZIONE 5. Conrollo del pendolo inverso Esempio. Sia dao il seguene sisema fisico. y u() M V θ H m J mg L x Calcolare una reroazione dinamica dell uscia θ che sabilizzi il sisema nell inorno
Capiolo. INTRODUZIONE 5. Conrollo del pendolo inverso Esempio. Sia dao il seguene sisema fisico. y u() M V θ H m J mg L x Calcolare una reroazione dinamica dell uscia θ che sabilizzi il sisema nell inorno
Prova Scritta di Robotica I B: preferibile per 5 crediti 12 Gennaio 2010
 Prova Scria di Roboica I B: preferibile per 5 credii Gennaio Esercizio Si consideri il cammino caresiano paramerico x(s) p p(s) y(s) z(s) R cos s R sin s h s, s [, + ) dove R > e h >. Tale cammino è una
Prova Scria di Roboica I B: preferibile per 5 credii Gennaio Esercizio Si consideri il cammino caresiano paramerico x(s) p p(s) y(s) z(s) R cos s R sin s h s, s [, + ) dove R > e h >. Tale cammino è una
COMPITO TEST- RELATIVITA GALILEANA SIMULAZIONE
 COMPITO TEST- RELATIVITA GALILEANA SIMULAZIONE 1 2 3 4 5 6 7 In un sisema di riferimeno inerziale: A se la somma delle forze che agiscono su un puno maeriale è nulla, la sua velocià non è cosane e, se
COMPITO TEST- RELATIVITA GALILEANA SIMULAZIONE 1 2 3 4 5 6 7 In un sisema di riferimeno inerziale: A se la somma delle forze che agiscono su un puno maeriale è nulla, la sua velocià non è cosane e, se
Scheda Esercitazione 4 (Homework)
") Scheda Eserciazione 4 (Homework) EAUT Prof. Giuseppe C. Calafiore 19 oobre 211 Modelli a empo coninuo e simulazioni Esercizio 1 (Il moore elerico in correne coninua) In Figura 1 è rappresenao lo schema
Scheda Eserciazione 4 (Homework) EAUT Prof. Giuseppe C. Calafiore 19 oobre 211 Modelli a empo coninuo e simulazioni Esercizio 1 (Il moore elerico in correne coninua) In Figura 1 è rappresenao lo schema
Laboratorio di Calcolo Numerico A.A. 2007/2008 II semestre
 Eserciazione 9 Corso di Laurea Triennale in Maemaica Laboraorio di Calcolo Numerico A.A. 7/8 II semesre Creare una carella dove verranno salvai i file creai nella sessione di lavoro. Appena enrai
Eserciazione 9 Corso di Laurea Triennale in Maemaica Laboraorio di Calcolo Numerico A.A. 7/8 II semesre Creare una carella dove verranno salvai i file creai nella sessione di lavoro. Appena enrai
INTRODUZIONE A SIMULINK
 INTRODUZIONE A SIMULINK ing. vincenzo lippiello Versione 1.0 1 Avviare Simulink Nella finestra di comando di MATLAB, nel prompt >>, digitare simulink e premere Enter Oppure cliccare sull apposita icona
INTRODUZIONE A SIMULINK ing. vincenzo lippiello Versione 1.0 1 Avviare Simulink Nella finestra di comando di MATLAB, nel prompt >>, digitare simulink e premere Enter Oppure cliccare sull apposita icona
MATLAB-SIMULINK. Simulink. Ing. Alessandro Pisano.
 MALAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.i Indice 3 7 9 6 7 8 3 37 4 43 44 59 63 68 73 8 85 9 99 9 3 33 Inroduzione Librerie e blocchi elemenari () Realizzazione di un modello Esempio:
MALAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.i Indice 3 7 9 6 7 8 3 37 4 43 44 59 63 68 73 8 85 9 99 9 3 33 Inroduzione Librerie e blocchi elemenari () Realizzazione di un modello Esempio:
Controllo di Manipolatori (Calcolo delle Traiettorie 2)
") Conrollo di Manipolaori (Calcolo delle Traieorie 2) Ph.D Ing. Folgheraier Michele Corso di Roboica Prof. Gini Anno Acc.. 2006/2007 Scela della velocià nei puni di via con meodo Eurisico: 2) Il sisema con
Conrollo di Manipolaori (Calcolo delle Traieorie 2) Ph.D Ing. Folgheraier Michele Corso di Roboica Prof. Gini Anno Acc.. 2006/2007 Scela della velocià nei puni di via con meodo Eurisico: 2) Il sisema con
Corso di Laurea in Disegno Industriale. Lezione 6 Novembre 2002 Derivate successive, derivate parziali e derivate di vettori. F.
 Corso di Laurea in Disegno Indusriale Corso di Meodi Numerici per il Design Lezione 6 Novembre Derivae successive, derivae parziali e derivae di veori F. Caliò I5 5 Derivazioni ripeue Derivaa della derivaa
Corso di Laurea in Disegno Indusriale Corso di Meodi Numerici per il Design Lezione 6 Novembre Derivae successive, derivae parziali e derivae di veori F. Caliò I5 5 Derivazioni ripeue Derivaa della derivaa
Meccanica Applicata alle Macchine Compito A 14/12/99
 page 1a Meccanica Applicaa alle Macchine Compio A 14/12/99 1. La figura mosra una pressa per la formaura per soffiaura di coneniori in maeriale plasico. Il meccanismo è sudiao in modo che in aperura (mosraa
page 1a Meccanica Applicaa alle Macchine Compio A 14/12/99 1. La figura mosra una pressa per la formaura per soffiaura di coneniori in maeriale plasico. Il meccanismo è sudiao in modo che in aperura (mosraa
Matlab e Simulink per i sistemi di controllo
 Matlab e Simulink per i sistemi di controllo Introduzione L utilizzo del toolbox SIMULINK di Matlab facilita la simulazione di sistemi interconnessi, consentendo la loro rappresentazione direttamente per
Matlab e Simulink per i sistemi di controllo Introduzione L utilizzo del toolbox SIMULINK di Matlab facilita la simulazione di sistemi interconnessi, consentendo la loro rappresentazione direttamente per
Forze dipendenti dalla velocità
 Forze dipendeni dalla velocià Ario Viscoso Corpo in cadua libera in un fluido -> resisenza f R del mezzo In casi semplici (geomeria semplice, bassa velocià, assenza di urbolenze nel fluido) vale f R =
Forze dipendeni dalla velocià Ario Viscoso Corpo in cadua libera in un fluido -> resisenza f R del mezzo In casi semplici (geomeria semplice, bassa velocià, assenza di urbolenze nel fluido) vale f R =
Fondamenti di di A utomatica Automatica Prof. Bruno Picasso Introduzione all all uso di di S imulink Simulink
 Fondamenti di Automatica Prof. Bruno Picasso Introduzione all uso di Simulink L ambiente Simulink Simulink è un ambiente grafico per la simulazione di sistemi complessi Perché non basta Matlab? È spesso
Fondamenti di Automatica Prof. Bruno Picasso Introduzione all uso di Simulink L ambiente Simulink Simulink è un ambiente grafico per la simulazione di sistemi complessi Perché non basta Matlab? È spesso
Complementi di Matematica e Calcolo Numerico A.A Laboratorio 12
 Complemeni di Maemaica e Calcolo Numerico A.A. 2018-2019 Laboraorio 12 Cosideriamo il Problema di Cauchy: y () = f(,y()) I = [ 0, max ], y( 0 ) = y 0 y 0 R Scegliamo di suddividere I in sooinervalli di
Complemeni di Maemaica e Calcolo Numerico A.A. 2018-2019 Laboraorio 12 Cosideriamo il Problema di Cauchy: y () = f(,y()) I = [ 0, max ], y( 0 ) = y 0 y 0 R Scegliamo di suddividere I in sooinervalli di
1. ESEMPIO DI CINEMATICA DI UN SISTEMA A DUE CORPI RIGIDI
 . ESEMPIO DI CINEMATICA DI UN SISTEMA A DUE CORPI RIGIDI Dao il sisema illusrao in Figura, consisene in due barre rigide connesse da un giuno di roazione orizzonale ; la prima barra è vincolaa a ruoare
. ESEMPIO DI CINEMATICA DI UN SISTEMA A DUE CORPI RIGIDI Dao il sisema illusrao in Figura, consisene in due barre rigide connesse da un giuno di roazione orizzonale ; la prima barra è vincolaa a ruoare
Calcolo numerico e ODE. Integrazione Numerica. Calcolo numerico Integrazione numerica Derivazione numerica. Equazioni differenziali.
 Calcolo numerico e ODE Inegrazione Numerica Calcolo numerico Inegrazione numerica Derivazione numerica Equazioni differenziali Meodo dei reangoli Con alezza relaiva al puno medio Implemenazione: funcion
Calcolo numerico e ODE Inegrazione Numerica Calcolo numerico Inegrazione numerica Derivazione numerica Equazioni differenziali Meodo dei reangoli Con alezza relaiva al puno medio Implemenazione: funcion
Introduzione e modellistica dei sistemi
 Inroduzione e modellisica dei sisemi Modellisica dei sisemi eleromeccanici Principi fisici di funzionameno Moore elerico in correne coninua (DC-moor) DC-moor con comando di armaura DC-moor con comando
Inroduzione e modellisica dei sisemi Modellisica dei sisemi eleromeccanici Principi fisici di funzionameno Moore elerico in correne coninua (DC-moor) DC-moor con comando di armaura DC-moor con comando
5. Test di Dinamica - Parte 1
 5. Tes di Dinaica - Pare 1 5.1 Quano vale la ensione della fune che unisce i due pesi 1 e (fune e carrucola di assa rascurabile) nel sisea rappresenao in figura se 1? 1) T = 1 g ) T = 3) T = ( 1 + ) g
5. Tes di Dinaica - Pare 1 5.1 Quano vale la ensione della fune che unisce i due pesi 1 e (fune e carrucola di assa rascurabile) nel sisea rappresenao in figura se 1? 1) T = 1 g ) T = 3) T = ( 1 + ) g
Recupero 1 compitino di Analisi Matematica 2 Ingegneria Elettronica. Politecnico di Milano. A.A. 2018/2019. Prof. M. Bramanti
 Recupero 1 compiino di Analisi Maemaica Ingegneria Eleronica. Poliecnico di Milano Es. Puni A.A. 18/19. Prof. M. Bramani 1 Tema n 1 3 4 5 6 To. Cognome e nome in sampaello codice persona o n di maricola
Recupero 1 compiino di Analisi Maemaica Ingegneria Eleronica. Poliecnico di Milano Es. Puni A.A. 18/19. Prof. M. Bramani 1 Tema n 1 3 4 5 6 To. Cognome e nome in sampaello codice persona o n di maricola
P suolo in P; 2. la distanza d, dall uscita dello
 acolà di Ingegneria Prova Generale di isica I 1.07.004 Compio A Esercizio n.1 Uno sciaore di massa m = 60 Kg pare da fermo da un alezza h = 8 m rispeo al suolo lungo uno scivolo inclinao di un angolo α
acolà di Ingegneria Prova Generale di isica I 1.07.004 Compio A Esercizio n.1 Uno sciaore di massa m = 60 Kg pare da fermo da un alezza h = 8 m rispeo al suolo lungo uno scivolo inclinao di un angolo α
Analisi Matematica II Corso di Ingegneria Gestionale Compito A del
 Analisi Maemaica II Corso di Ingegneria Gesionale Compio A del -6-7 - È obbligaorio consegnare ui i fogli, anche la brua e il eso. - Le rispose senza giusificazione sono considerae nulle. Esercizio. puni
Analisi Maemaica II Corso di Ingegneria Gesionale Compio A del -6-7 - È obbligaorio consegnare ui i fogli, anche la brua e il eso. - Le rispose senza giusificazione sono considerae nulle. Esercizio. puni
MATLAB-SIMULINK. Simulink. Ing. Alessandro Pisano. Bergamo, 17-19/11/2009
 1 MATLAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.i Bergamo, 17-19/11/2009 2 Indice 3 7 9 11 16 20 27 28 31 37 40 43 44 59 63 68 73 81 85 90 99 109 112 123 133 Inroduzione Librerie e
1 MATLAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.i Bergamo, 17-19/11/2009 2 Indice 3 7 9 11 16 20 27 28 31 37 40 43 44 59 63 68 73 81 85 90 99 109 112 123 133 Inroduzione Librerie e
Soluzioni degli esercizi di Analisi Matematica I
 Sapienza - Universià di Roma - Corso di Laurea in Ingegneria Eleroecnica Soluzioni degli esercizi di Analisi Maemaica I A.A. 6 7 - Docene: Luca Baaglia Lezione del Dicembre 6 Argomeno: Equazioni differenziali,
Sapienza - Universià di Roma - Corso di Laurea in Ingegneria Eleroecnica Soluzioni degli esercizi di Analisi Maemaica I A.A. 6 7 - Docene: Luca Baaglia Lezione del Dicembre 6 Argomeno: Equazioni differenziali,
4 appartengono alla traiettoria di γ. 1, C = 2. ( v) Determinare in quali punti il piano normale alla curva è parallelo all asse z. π cos π 2.
 Determinare in quali punti il piano normale alla curva è parallelo all asse z. π cos π 2.") Soluzioni Esercizi 6. () Sia γ: R R 3 la curva definia da γ() = cos. e (i) Deerminare se A =, B =, C = 4 apparengono alla raieoria di γ. 8 (ii) Deerminare re puni P, Q, R sulla raieoria di γ. (iii) Deerminare
Soluzioni Esercizi 6. () Sia γ: R R 3 la curva definia da γ() = cos. e (i) Deerminare se A =, B =, C = 4 apparengono alla raieoria di γ. 8 (ii) Deerminare re puni P, Q, R sulla raieoria di γ. (iii) Deerminare
Seminario Matlab-Simulink per l Ingegneria Simulink & grafica. Gennaio 2016.
 Seminario Matlab-Simulink per l Ingegneria Simulink & grafica. Gennaio 2016. Motore in corrente continua Sottosistemi (subsystems ) Maschere (mask) Creazione di grafici in Matlab con dati generati in Simulink
Seminario Matlab-Simulink per l Ingegneria Simulink & grafica. Gennaio 2016. Motore in corrente continua Sottosistemi (subsystems ) Maschere (mask) Creazione di grafici in Matlab con dati generati in Simulink
), dove K è una costante positiva della quale si richiede l unità di
, dove K è una costante positiva della quale si richiede l unità di") Simulazione di prova scria di MATEMATICA-FISICA - MIUR -..019 PROBLEMA 1 - soluzione con la calcolarice grafica TI-Nspire CX della Texas Insrumens Soluzione a cura di: Formaori T Ialia - Teachers Teaching
Simulazione di prova scria di MATEMATICA-FISICA - MIUR -..019 PROBLEMA 1 - soluzione con la calcolarice grafica TI-Nspire CX della Texas Insrumens Soluzione a cura di: Formaori T Ialia - Teachers Teaching
Prova Scritta di Robotica II. 25 Marzo 2004
 Prova Scritta di Robotica II 5 Marzo 004 Si consideri il robot planare RP in figura in moto in un piano verticale Siano: m 1 e m le masse dei due bracci; d 1 la distanza del baricentro del primo braccio
Prova Scritta di Robotica II 5 Marzo 004 Si consideri il robot planare RP in figura in moto in un piano verticale Siano: m 1 e m le masse dei due bracci; d 1 la distanza del baricentro del primo braccio
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Esercizi. 1, v 2 = 1. , v 3 = si determini un vettore non nullo appartenente a span{v 1, v 2 } span{v 3, v 4 }
 Esercizi Spazi veoriali. Nello spazio veoriale R 3 si considerino i veori v, v, v 3 si deermini un veore non nullo apparenene a span{v, v } span{v 3, v 4 }, v 4. Si deermini per quali valori del paramero
Esercizi Spazi veoriali. Nello spazio veoriale R 3 si considerino i veori v, v, v 3 si deermini un veore non nullo apparenene a span{v, v } span{v 3, v 4 }, v 4. Si deermini per quali valori del paramero
Esercitazioni di Tecnologie per l Automazione. Introduzione a Matlab e Simulink
 Esercitazioni di Tecnologie per l Automazione Introduzione a Matlab e Simulink TA ES Parte 2, 2 A cosa serve questa presentazione Scopi di questo materiale: fornire le informazioni necessarie per l uso
Esercitazioni di Tecnologie per l Automazione Introduzione a Matlab e Simulink TA ES Parte 2, 2 A cosa serve questa presentazione Scopi di questo materiale: fornire le informazioni necessarie per l uso
Matlab e Simulink per i sistemi di controllo
 Matlab e Simulink per i sistemi di controllo Introduzione (1/2) L utilizzo del linguaggio MATLAB permette di realizzare facilmente i principali passi necessari per l analisi ed il progetto di sistemi di
Matlab e Simulink per i sistemi di controllo Introduzione (1/2) L utilizzo del linguaggio MATLAB permette di realizzare facilmente i principali passi necessari per l analisi ed il progetto di sistemi di
Introduzione a Matlab e Simulink
 Introduzione a Matlab e Simulink Fondamenti di Automatica 1 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento,
Introduzione a Matlab e Simulink Fondamenti di Automatica 1 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento,
Motivazioni: problema di analisi. Introduzione a Matlab e Simulink. Dove trovare altre informazioni? A cosa serve questa presentazione
 Introduzione a Matlab e Simulink Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni del sistema? Come analizzare il comportamento, l evoluzione di
Introduzione a Matlab e Simulink Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni del sistema? Come analizzare il comportamento, l evoluzione di
MATLAB-SIMULINK. Simulink. Simulazione di un filtro passabasso RC. Ing. Alessandro Pisano.
 1 MATLAB-SIMULINK Simulink Simulazione di un filtro passabasso RC Ing. Alessandro Pisano pisano@diee.unica.it 2 Filtro passa-basso RC V in + V out Ingredienti Simulink Esecuzione automatica dei modelli
1 MATLAB-SIMULINK Simulink Simulazione di un filtro passabasso RC Ing. Alessandro Pisano pisano@diee.unica.it 2 Filtro passa-basso RC V in + V out Ingredienti Simulink Esecuzione automatica dei modelli
CONTROLLI AUTOMATICI Ingegneria Meccatronica
 CONTROLLI AUTOMATICI Ingegneria Meccatronica CONTROLLI AUTOMATICI INTRODUZIONE SIMULINK Ing. Tel. 0522 522234 e-mail: secchi.cristian@unimore.it http://www.ingre.unimore.it/staff/secchi Simulink Simulink
CONTROLLI AUTOMATICI Ingegneria Meccatronica CONTROLLI AUTOMATICI INTRODUZIONE SIMULINK Ing. Tel. 0522 522234 e-mail: secchi.cristian@unimore.it http://www.ingre.unimore.it/staff/secchi Simulink Simulink
Laboratorio di MATLAB
 DII Università di Siena Laboratorio di MATLAB Alessandro Alessio Dipartimento di Ingegneria dell Informazione, Università di Siena, Italy alessio@dii.unisi.it www.dii.unisi.it/ control/teaching thanks
DII Università di Siena Laboratorio di MATLAB Alessandro Alessio Dipartimento di Ingegneria dell Informazione, Università di Siena, Italy alessio@dii.unisi.it www.dii.unisi.it/ control/teaching thanks
MATLAB-SIMULINK. Simulink. Simulazione di un sistema ABS (Anti-lock bracking system) Ing. Alessandro Pisano.
 Ing. Alessandro Pisano.") 1 MATLAB-SIMULINK Simulink Simulazione di un sistema ABS (Anti-lock bracking system) Ing. Alessandro Pisano pisano@diee.unica.it 2 Anti-lock bracking system (ABS) Il sistema anti bloccaggio, meglio noto
1 MATLAB-SIMULINK Simulink Simulazione di un sistema ABS (Anti-lock bracking system) Ing. Alessandro Pisano pisano@diee.unica.it 2 Anti-lock bracking system (ABS) Il sistema anti bloccaggio, meglio noto
A Nome:... Cognome:... Matricola:...
 A Nome:................... Cognome:................... Maricola:................... Quando desidera sosenere la prova orale? /2/28 8/2/28 Universià di Milano Bicocca Corso di Laurea di primo livello in
A Nome:................... Cognome:................... Maricola:................... Quando desidera sosenere la prova orale? /2/28 8/2/28 Universià di Milano Bicocca Corso di Laurea di primo livello in
(b) Determinare l equazione parametrica della retta r passante per O e ortogonale
 Determinare l equazione parametrica della retta r passante per O e ortogonale") SCRIVERE IN MODO LEGGIBILE NOME E COGNOME! CORSO DI GEOMETRIA E ALGEBRA Cognome: Nome: 6 febbraio 8 Maricola: Corso di Laurea: (8 p) Si fissi un riferimeno caresiano R(O î ĵ ˆk) nello spaio euclideo Si
SCRIVERE IN MODO LEGGIBILE NOME E COGNOME! CORSO DI GEOMETRIA E ALGEBRA Cognome: Nome: 6 febbraio 8 Maricola: Corso di Laurea: (8 p) Si fissi un riferimeno caresiano R(O î ĵ ˆk) nello spaio euclideo Si
INTRODUZIONE A SIMULINK
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm INTRODUZIONE A SIMULINK
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm INTRODUZIONE A SIMULINK
Tesine da svolgere per la preparazione dell esame
 Corso di Laurea in Ingegneria dell Automazione Esame di Robotica Industriale A.A. 2007/2008 Tesine da svolgere per la preparazione dell esame Vengono di seguito presentati alcuni esercizi studiati per
Corso di Laurea in Ingegneria dell Automazione Esame di Robotica Industriale A.A. 2007/2008 Tesine da svolgere per la preparazione dell esame Vengono di seguito presentati alcuni esercizi studiati per
MATLAB-SIMULINK. Simulink. Ing. Alessandro Pisano.
 MALAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.i Indice 3 7 9 6 7 8 3 37 4 43 44 59 63 68 73 8 85 9 99 9 3 33 Inroduzione Librerie e blocchi elemenari () Realizzazione di un modello Esempio:
MALAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.i Indice 3 7 9 6 7 8 3 37 4 43 44 59 63 68 73 8 85 9 99 9 3 33 Inroduzione Librerie e blocchi elemenari () Realizzazione di un modello Esempio:
Introduzione al Simulink
 Sommario Descrizione generale dell ambiente Simulink di Matlab. Principi di funzionamento. Ambiente di simulazione. Esempi: realizzazione di modelli matematici di sistemi dinamici facendo uso di Simulink
Sommario Descrizione generale dell ambiente Simulink di Matlab. Principi di funzionamento. Ambiente di simulazione. Esempi: realizzazione di modelli matematici di sistemi dinamici facendo uso di Simulink
MOTO RETTILINEO UNIFORMEMENTE ACCELERATO (M.R.U.A.) Giuseppe Frangiamore con la collaborazione di Francesco Garofalo
 Giuseppe Frangiamore con la collaborazione di Francesco Garofalo") MOTO RETTILINEO UNIFORMEMENTE ACCELERATO (M.R.U.A.) Giuseppe Frangiamore con la collaborazione di Francesco Garofalo Accelerazione Il moo reilineo uniformemene accelerao è il moo di un puno sooposo ad
MOTO RETTILINEO UNIFORMEMENTE ACCELERATO (M.R.U.A.) Giuseppe Frangiamore con la collaborazione di Francesco Garofalo Accelerazione Il moo reilineo uniformemene accelerao è il moo di un puno sooposo ad
Soluzione. Le componenti del gradiente sono le derivate parziali della funzione: cos y 0 (x 0, y 0 ) domf =R 2. sin y 0 (x x 0 ) + e x 0
 domf =R 2. sin y 0 (x x 0 ) + e x 0") Gradiene e piano angene Definizione 1 Sia f : A R 2 R, f derivabile in (x 0, y 0 ) A). Definiamo il veore gradiene di f in (x 0, y 0 ): f(x 0, y 0 ) = (f x (x 0, y 0 ), f y (x 0, y 0 )). Definiamo il piano
Gradiene e piano angene Definizione 1 Sia f : A R 2 R, f derivabile in (x 0, y 0 ) A). Definiamo il veore gradiene di f in (x 0, y 0 ): f(x 0, y 0 ) = (f x (x 0, y 0 ), f y (x 0, y 0 )). Definiamo il piano
Riassunto di Meccanica
 Riassuno di Meccanica Cinemaica del puno maeriale 1 Cinemaica del puno: moo nel piano 5 Dinamica del puno: le leggi di Newon 6 Dinamica del puno: Lavoro, energia, momeni 8 Dinamica del puno: Lavoro, energia,
Riassuno di Meccanica Cinemaica del puno maeriale 1 Cinemaica del puno: moo nel piano 5 Dinamica del puno: le leggi di Newon 6 Dinamica del puno: Lavoro, energia, momeni 8 Dinamica del puno: Lavoro, energia,
FISICA GENERALE I A.A Settembre 2012 Cognome Nome n. matricola
 FISI GENERLE I.. 0-0 9 Seembre 0 Voo: 9 credii 0 credii credii Esercizio n. Un auomobile di massa M frena, a parire dalla velocià iniziale v 0, fino ad arresarsi. Sapendo che, a causa del riscaldameno
FISI GENERLE I.. 0-0 9 Seembre 0 Voo: 9 credii 0 credii credii Esercizio n. Un auomobile di massa M frena, a parire dalla velocià iniziale v 0, fino ad arresarsi. Sapendo che, a causa del riscaldameno
Totale schede: 26 - Formato di acquisizione: A3(297x420) - Formato stampa richiesto: A4(210x297)
 - Formato stampa richiesto: A4(210x297)") Totale schede: 26 - Formato di acquisizione: A3(297x420) - Formato stampa richiesto: A4(210x297) Totale schede: 26 - Formato di acquisizione: A3(297x420) - Formato stampa richiesto: A4(210x297) Totale
Totale schede: 26 - Formato di acquisizione: A3(297x420) - Formato stampa richiesto: A4(210x297) Totale schede: 26 - Formato di acquisizione: A3(297x420) - Formato stampa richiesto: A4(210x297) Totale
Catasto dei Fabbricati - Situazione al 24/07/ Comune di TRIESTE (L424) - < Sez.Urb.: Q - Foglio: 36 - Particella: 4099/1 - Subalterno: 5 >
 - < Sez.Urb.: Q - Foglio: 36 - Particella: 4099/1 - Subalterno: 5 >") Totale schede: 33 - Formato di acquisizione: A4(210x297) - Formato stampa richiesto: A3(297x420) Totale schede: 33 - Formato di acquisizione: A4(210x297) - Formato stampa richiesto: A3(297x420) Totale
Totale schede: 33 - Formato di acquisizione: A4(210x297) - Formato stampa richiesto: A3(297x420) Totale schede: 33 - Formato di acquisizione: A4(210x297) - Formato stampa richiesto: A3(297x420) Totale
Il Corso di Fisica per Scienze Biologiche
 Il Corso di Fisica per Scienze Biologiche Ø Prof. Ailio Sanocchia Ø Ufficio presso il Diparimeno di Fisica (Quino Piano) Tel. 075-585 708 Ø E-mail: ailio.sanocchia@pg.infn.i Ø Web: hp://www.fisica.unipg.i/~ailio.sanocchia
Il Corso di Fisica per Scienze Biologiche Ø Prof. Ailio Sanocchia Ø Ufficio presso il Diparimeno di Fisica (Quino Piano) Tel. 075-585 708 Ø E-mail: ailio.sanocchia@pg.infn.i Ø Web: hp://www.fisica.unipg.i/~ailio.sanocchia
Il Corso di Fisica per Scienze Biologiche
 Il Corso di Fisica per Scienze Biologiche Prof. Ailio Sanocchia Ufficio presso il Diparimeno di Fisica (Quino Piano) Tel. 75-585 78 E-mail: ailio.sanocchia@pg.infn.i Web: hp://www.fisica.unipg.i/~ailio.sanocchia
Il Corso di Fisica per Scienze Biologiche Prof. Ailio Sanocchia Ufficio presso il Diparimeno di Fisica (Quino Piano) Tel. 75-585 78 E-mail: ailio.sanocchia@pg.infn.i Web: hp://www.fisica.unipg.i/~ailio.sanocchia
FISICA. Lezione n. 3 (2 ore) Gianluca Colò Dipartimento di Fisica sede Via Celoria 16, Milano
 Gianluca Colò Dipartimento di Fisica sede Via Celoria 16, Milano") Universià degli Sudi di Milano Facolà di Scienze Maemaiche Fisiche e Naurali Corsi di Laurea in: Informaica ed Informaica per le Telecomunicazioni Anno accademico 1/11, Laurea Triennale, Edizione diurna
Universià degli Sudi di Milano Facolà di Scienze Maemaiche Fisiche e Naurali Corsi di Laurea in: Informaica ed Informaica per le Telecomunicazioni Anno accademico 1/11, Laurea Triennale, Edizione diurna
Equazioni orarie. Riassumendo. 1 2 at
 Equazioni orarie Riassumendo s s 1 a a as Moo ericale dei grai o Tui i corpi cadono nel uoo con accelerazione cosane (esperienza di Galileo). g = 9.8 m/s h P s s suolo g gs 1 g Da una orre ala 8m cade
Equazioni orarie Riassumendo s s 1 a a as Moo ericale dei grai o Tui i corpi cadono nel uoo con accelerazione cosane (esperienza di Galileo). g = 9.8 m/s h P s s suolo g gs 1 g Da una orre ala 8m cade
E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTROLLO di un MOTORE ELETTRICO a CORRENTE CONTINUA
 E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTOLLO di un MOTOE ELETTICO a COENTE CONTINUA 1. EQUAZIONI DEL MODELLO Equazioni nel dominio del tempo descrittive del Modello elettromagnetico
E1. IMPLEMENTAZIONE in MATLAB-SIMULINK del MODELLO e del CONTOLLO di un MOTOE ELETTICO a COENTE CONTINUA 1. EQUAZIONI DEL MODELLO Equazioni nel dominio del tempo descrittive del Modello elettromagnetico
Laboratorio di Matlab
 Laboratorio di Matlab Alessandro Formaglio Dipartimento di Ingegneria dell Informazione, Università di Siena alex@dii.unisi.it http://www.dii.unisi.it/ control/matlab/labmatlab.html 21 Luglio 2009 DII
Laboratorio di Matlab Alessandro Formaglio Dipartimento di Ingegneria dell Informazione, Università di Siena alex@dii.unisi.it http://www.dii.unisi.it/ control/matlab/labmatlab.html 21 Luglio 2009 DII
Controllo cinematico Controllo dinamico di un singolo asse
 Corso di Robotica 1 Controllo cinematico Controllo dinamico di un singolo asse Prof. Alessandro De Luca Robotica 1 1 Controllo del moto si vuole realizzare effettivamente un moto desiderato regolazione
Corso di Robotica 1 Controllo cinematico Controllo dinamico di un singolo asse Prof. Alessandro De Luca Robotica 1 1 Controllo del moto si vuole realizzare effettivamente un moto desiderato regolazione
Esercizi in MATLAB-SIMULINK
 Appendice A Esercizi in MATLAB-SIMULINK A.1 Implementazione del modello e del controllo di un motore elettrico a corrente continua A.1.1 Equazioni del modello Equazioni nel dominio del tempo descrittive
Appendice A Esercizi in MATLAB-SIMULINK A.1 Implementazione del modello e del controllo di un motore elettrico a corrente continua A.1.1 Equazioni del modello Equazioni nel dominio del tempo descrittive
25.2. Osservazione. Siccome F(x, y, z) = 0 è un equazione e non un identità, una superficie non contiene tutti gli 3 punti dello spazio.
 = 0 è un equazione e non un identità, una superficie non contiene tutti gli 3 punti dello spazio.") . Cono e cilindro.. Definiione. Diremo superficie il luogo geomerico dei puni dello spaio le cui coordinae soddisfano un equaione del ipo F che viene dea equaione caresiana della superficie. Se F è un
. Cono e cilindro.. Definiione. Diremo superficie il luogo geomerico dei puni dello spaio le cui coordinae soddisfano un equaione del ipo F che viene dea equaione caresiana della superficie. Se F è un
Complementi di Matematica e Calcolo Numerico A.A Laboratorio 13
 Complemeni di Maemaica e Calcolo Numerico A.A. 2017-2018 Laboraorio 13 Cosideriamo il Problema di Cauchy: y () = f(,y()) I = [ 0, max ], y( 0 ) = y 0 y 0 R Scegliamo di suddividere I in sooinervalli di
Complemeni di Maemaica e Calcolo Numerico A.A. 2017-2018 Laboraorio 13 Cosideriamo il Problema di Cauchy: y () = f(,y()) I = [ 0, max ], y( 0 ) = y 0 y 0 R Scegliamo di suddividere I in sooinervalli di
Laboratorio del corso di Progettazione dei Sistemi di Controllo. Prof. Roberto Oboe
 Laboratorio del corso di Progettazione dei Sistemi di Controllo Prof. Roberto Oboe Organizzazione Faremo 6 sessioni di laboratorio. Il 4/6 rilevazione sulla qualità della didattica. 10 gruppi da 3 studenti
Laboratorio del corso di Progettazione dei Sistemi di Controllo Prof. Roberto Oboe Organizzazione Faremo 6 sessioni di laboratorio. Il 4/6 rilevazione sulla qualità della didattica. 10 gruppi da 3 studenti
Equazioni Differenziali (5)
") Equazioni Differenziali (5) Daa un equazione differenziale lineare omogenea y n + a n 1 ()y n 1 + a 0 ()y = 0, (1) se i coefficieni a i non dipendono da, abbiamo viso che le soluzioni si possono deerminare
Equazioni Differenziali (5) Daa un equazione differenziale lineare omogenea y n + a n 1 ()y n 1 + a 0 ()y = 0, (1) se i coefficieni a i non dipendono da, abbiamo viso che le soluzioni si possono deerminare
Controllo dei Manipolatori Industriali Esercitazioni Sperimentali 2002/03 Manipolatore IMI.
 Introduzione Le esercitazioni sperimentali hanno luogo nei locali del Laboratorio di Robotica (LabRob), utilizzando il manipolatore planare a due bracci prodotto dalla IMI (USA). Le esercitazioni avranno
Introduzione Le esercitazioni sperimentali hanno luogo nei locali del Laboratorio di Robotica (LabRob), utilizzando il manipolatore planare a due bracci prodotto dalla IMI (USA). Le esercitazioni avranno
Meccanica introduzione
 Meccanica inroduzione La meccanica e quella pare della Fisica che sudia il moo dei corpi. Essa e cosiuia dalla cinemaica e dalla dinamica. La dinamica si occupa dello sudio del moo e delle sue cause. La
Meccanica inroduzione La meccanica e quella pare della Fisica che sudia il moo dei corpi. Essa e cosiuia dalla cinemaica e dalla dinamica. La dinamica si occupa dello sudio del moo e delle sue cause. La
T.(a) T.(b) Es.1 Es.2 Es.3 Es.4 Totale. Cognome: Nome: Matricola: Prima parte: Teoria (punti 4+4).
 T.(b) Es.1 Es.2 Es.3 Es.4 Totale. Cognome: Nome: Matricola: Prima parte: Teoria (punti 4+4).") T.(a) T.(b) Es.1 Es. Es.3 Es.4 Toale Analisi e Geomeria 1 Quaro Appello Seembre 18 Docene: Numero di iscrizione: Cognome: Nome: Maricola: Prima pare: Teoria (puni 4+4). T.(a) Enunciare e dimosrare il eorema
T.(a) T.(b) Es.1 Es. Es.3 Es.4 Toale Analisi e Geomeria 1 Quaro Appello Seembre 18 Docene: Numero di iscrizione: Cognome: Nome: Maricola: Prima pare: Teoria (puni 4+4). T.(a) Enunciare e dimosrare il eorema
Geometria analitica del piano pag 1 Adolfo Scimone
 Geomeria analiica del piano pag Adolfo Scimone GEOMETRIA ANALITICA Lo scopo della geomeria analiica è quello di individuare i puni di una rea, di un piano, dello spazio, o più in generale gli eni geomerici
Geomeria analiica del piano pag Adolfo Scimone GEOMETRIA ANALITICA Lo scopo della geomeria analiica è quello di individuare i puni di una rea, di un piano, dello spazio, o più in generale gli eni geomerici
Università Carlo Cattaneo Ingegneria gestionale Analisi matematica a.a. 2016/2017 EQUAZIONI DIFFERENZIALI 1
 Universià Carlo Caaneo Ingegneria gesionale Analisi maemaica aa 06/07 EQUAZIONI DIFFERENZIALI ESERCIZI CON SOLUZIONE Trovare l inegrale generale dell equazione ' Si raa di un equazione differenziale lineare
Universià Carlo Caaneo Ingegneria gesionale Analisi maemaica aa 06/07 EQUAZIONI DIFFERENZIALI ESERCIZI CON SOLUZIONE Trovare l inegrale generale dell equazione ' Si raa di un equazione differenziale lineare
Università degli Studi di Padova Facoltà di Ingegneria Laurea in Ingegneria Gestionale, Doc. M. Motta e G. Zanzotto
 Universià degli Sudi di Padova Facolà di Ingegneria Laurea in Ingegneria Gesionale, oc. M. Moa e G. Zanzoo Soluzioni degli esercizi di auoverifica. 3. Inegrali di superficie.. ae la superficie Vicenza
Universià degli Sudi di Padova Facolà di Ingegneria Laurea in Ingegneria Gesionale, oc. M. Moa e G. Zanzoo Soluzioni degli esercizi di auoverifica. 3. Inegrali di superficie.. ae la superficie Vicenza
Introduzione e strumenti
 Introduzione e strumenti Introduzione Analisi e simulazione in ambiente Matlab Introduzione all utilizzo di Simulink Simulazione in ambiente Simulink 2 2007 Politecnico di Torino 1 Introduzione (1/2) L
Introduzione e strumenti Introduzione Analisi e simulazione in ambiente Matlab Introduzione all utilizzo di Simulink Simulazione in ambiente Simulink 2 2007 Politecnico di Torino 1 Introduzione (1/2) L
STABILITÀ DI SISTEMI DINAMICI STABILITÀ INGRESSO-USCITA (BIBO)
") 3 Capiolo STABILITÀ DI SISTEMI DINAMICI STABILITÀ INGRESSO-USCITA (BIBO) Un generico sisema è deo sabile se, ecciao da una qualsiasi funzione di enraa ale da essere sempre limiaa, risponde con una uscia
3 Capiolo STABILITÀ DI SISTEMI DINAMICI STABILITÀ INGRESSO-USCITA (BIBO) Un generico sisema è deo sabile se, ecciao da una qualsiasi funzione di enraa ale da essere sempre limiaa, risponde con una uscia
[8.1] [8.1,a] Nel caso di uno spostamento angolare (moto di un pendolo) ξ = (coordinata angolare) [8.1.b]
![[8.1] [8.1,a] Nel caso di uno spostamento angolare (moto di un pendolo) ξ = (coordinata angolare) [8.1.b]](/thumbs/74/70649812.jpg "[8.1] [8.1,a] Nel caso di uno spostamento angolare (moto di un pendolo) ξ = (coordinata angolare) [8.1.b]") U n i v e r s i à d e g l i S u d i d i C a a n i a - C o r s o d i s u d i o i n I n g e g n e r i a I n f o r m a i c a - D i p a r i m e n o d i F i s i c a e s r o n o m i a MOI OSCILLOI - Moo armonico
U n i v e r s i à d e g l i S u d i d i C a a n i a - C o r s o d i s u d i o i n I n g e g n e r i a I n f o r m a i c a - D i p a r i m e n o d i F i s i c a e s r o n o m i a MOI OSCILLOI - Moo armonico
Figura 1: Modello del sistema. L cos x 1 x 1 + τ ml 2. kl cos x 1 1 sin x1 x 1.
 Esercitazione Scritta di Controlli Automatici 8--8 Quesito Si consideri il sistema meccanico in figura, impiegato per effettuare test in trazione su molle lineari, ecostituitodaunbracciodimassam,chesisupponeconcentratanellasuaestremità,edilunghezzal.
Esercitazione Scritta di Controlli Automatici 8--8 Quesito Si consideri il sistema meccanico in figura, impiegato per effettuare test in trazione su molle lineari, ecostituitodaunbracciodimassam,chesisupponeconcentratanellasuaestremità,edilunghezzal.
Capitolo 3 : Esercizio 42 lancio di una goccia di inchiostro in una printer inkjet
 Capiolo 3 : Esercizio 4 lancio di una goccia di inchiosro in una priner inkje Una singola goccia di inchiosro( 1 pl ) è circa un milionesimo di una goccia d'acqua che esce da un conagocce. Un caraere medio
Capiolo 3 : Esercizio 4 lancio di una goccia di inchiosro in una priner inkje Una singola goccia di inchiosro( 1 pl ) è circa un milionesimo di una goccia d'acqua che esce da un conagocce. Un caraere medio
Controllo di traiettoria
 Corso di Robotica 2 Controllo di traiettoria Prof. Alessandro De Luca A. De Luca Controllo a dinamica inversa dato il modello dinamico del robot B(q) q + n(q, q ) = u c(q, q ) + g(q) + modelli di attrito
Corso di Robotica 2 Controllo di traiettoria Prof. Alessandro De Luca A. De Luca Controllo a dinamica inversa dato il modello dinamico del robot B(q) q + n(q, q ) = u c(q, q ) + g(q) + modelli di attrito
Vettori e Matrici. Corso di Calcolo Numerico. 24 Aprile 2018
 Vettori e Matrici 24 Aprile 2018 Richiami In MATLAB, ogni variabile ha una struttura di tipo vettoriale o array. Un array è un insieme di valori ordinati, cioè memorizza più dati all interno di una struttura
Vettori e Matrici 24 Aprile 2018 Richiami In MATLAB, ogni variabile ha una struttura di tipo vettoriale o array. Un array è un insieme di valori ordinati, cioè memorizza più dati all interno di una struttura
Analisi Matematica II Corso di Ingegneria Gestionale Compito del log 1 + x2 y 2
 Analisi Maemaica II Corso di Ingegneria Gesionale Compio del 5-7-7 - È obbligaorio consegnare ui i fogli, anche la brua e il eso. - Le rispose senza giusificazione sono considerae nulle. Esercizio. puni
Analisi Maemaica II Corso di Ingegneria Gesionale Compio del 5-7-7 - È obbligaorio consegnare ui i fogli, anche la brua e il eso. - Le rispose senza giusificazione sono considerae nulle. Esercizio. puni
Legame fra l azione della forza agente sul punto durante l intervallo dt e la variazione della sua quantita di moto
 Seconda legge di Newon: Fd = dp Legame fra l azione della forza agene sul puno durane l inervallo d e la variazione della sua quania di moo Casi in cui F() e noa: relaivamene rari Spesso per conoscere
Seconda legge di Newon: Fd = dp Legame fra l azione della forza agene sul puno durane l inervallo d e la variazione della sua quania di moo Casi in cui F() e noa: relaivamene rari Spesso per conoscere

Cinematica moto armonico. Appunti di Fisica. Prof. Calogero Contrino
 2006 Cinemaica moo armonico Appuni di Fisica Prof. Calogero Conrino : definizione Il moo di un puno maeriale P è deo armonico se soddisfa le segueni condizioni: La raieoria è un segmeno. Le posizioni occupae
2006 Cinemaica moo armonico Appuni di Fisica Prof. Calogero Conrino : definizione Il moo di un puno maeriale P è deo armonico se soddisfa le segueni condizioni: La raieoria è un segmeno. Le posizioni occupae
Università Carlo Cattaneo Ingegneria gestionale Analisi matematica a.a. 2017/2018 EQUAZIONI DIFFERENZIALI 1
 Universià Carlo Caaneo Ingegneria gesionale Analisi maemaica aa 07/08 EQUAZIONI DIFFERENZIALI ESERCIZI CON SOLUZIONE Trovare l inegrale generale dell equazione ' Si raa di un equazione differenziale lineare
Universià Carlo Caaneo Ingegneria gesionale Analisi maemaica aa 07/08 EQUAZIONI DIFFERENZIALI ESERCIZI CON SOLUZIONE Trovare l inegrale generale dell equazione ' Si raa di un equazione differenziale lineare
Università di Pisa - Polo della Logistica di Livorno Corso di Laurea in Economia e Legislazione dei Sistemi Logistici. Anno Accademico: 2013/14
 Universià di isa - olo della Logisica di Livorno Corso di Laurea in Economia e Legislazione dei Sisemi Logisici Anno Accademico: 03/4 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docene: Marino Lupi
Universià di isa - olo della Logisica di Livorno Corso di Laurea in Economia e Legislazione dei Sisemi Logisici Anno Accademico: 03/4 CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO Docene: Marino Lupi
Introduzione a Simulink
 Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Sessione ordinaria 2019 Problema2 MATHESIS ROMA. Problema 2
 Problema 2 B varia secondo la legge: B = k ( 2 +a 2 ) Soluzione 3 r con r R e con a e k posiive [a]=[s] a ha le dimensioni di un empo, perché deve poersi sommare con, affinché la formula abbia senso. [k]=
Problema 2 B varia secondo la legge: B = k ( 2 +a 2 ) Soluzione 3 r con r R e con a e k posiive [a]=[s] a ha le dimensioni di un empo, perché deve poersi sommare con, affinché la formula abbia senso. [k]=
La risposta di un sistema lineare viscoso a un grado di libertà sollecitato da carichi impulsivi. Prof. Adolfo Santini - Dinamica delle Strutture 1
 La risposa di un sisema lineare viscoso a un grado di liberà solleciao da carichi impulsivi Prof. Adolfo Sanini - Dinamica delle Sruure 1 Inroduzione 1/2 Un carico p() si definisce impulsivo quando agisce
La risposa di un sisema lineare viscoso a un grado di liberà solleciao da carichi impulsivi Prof. Adolfo Sanini - Dinamica delle Sruure 1 Inroduzione 1/2 Un carico p() si definisce impulsivo quando agisce
Prova Scritta di Robotica I A: preferibile per 6 crediti 12 Gennaio 2010
 Prova Scria di Roboica I A: preferibile per 6 credii Gennaio Esercizio Si consideri il cammino caresiano paramerico p ps xs ys zs R cos s R sin s h s, s [, + dove R > e h >. Tale cammino è una spirale
Prova Scria di Roboica I A: preferibile per 6 credii Gennaio Esercizio Si consideri il cammino caresiano paramerico p ps xs ys zs R cos s R sin s h s, s [, + dove R > e h >. Tale cammino è una spirale
(studio del moto dei corpi) Cinematica: descrizione del moto. Dinamica: descrizione del moto in funzione della forza
 Cinematica: descrizione del moto. Dinamica: descrizione del moto in funzione della forza") MECCANICA (sudio del moo dei corpi) Cinemaica: descrizione del moo Dinamica: descrizione del moo in funzione della forza CINEMATICA del puno maeriale oo in una dimensione x 2 x 1 2 1 disanza percorsa empo
MECCANICA (sudio del moo dei corpi) Cinemaica: descrizione del moo Dinamica: descrizione del moo in funzione della forza CINEMATICA del puno maeriale oo in una dimensione x 2 x 1 2 1 disanza percorsa empo
Professionisti, tecnici e imprese Gruppo Editoriale Esselibri - Simone. sistemi editoriali
 Copyrigh 5 Esselibri S.p.A. Via F. usso, /D 8 Napoli Azienda con sisema qualià cerificao ISO : Tui i dirii riservai. È vieaa la riproduzione anche parziale e con qualsiasi mezzo senza l auorizzazione scria
Copyrigh 5 Esselibri S.p.A. Via F. usso, /D 8 Napoli Azienda con sisema qualià cerificao ISO : Tui i dirii riservai. È vieaa la riproduzione anche parziale e con qualsiasi mezzo senza l auorizzazione scria
GEOMETRIA svolgimento di uno scritto del 12 Gennaio 2011
 GEOMETRIA svolgimeno di uno scrio del Gennaio ) Trovare una base per lo spaio delle soluioni del seguene sisema omogeneo: + + 9 + 6. Il sisema può essere scrio in forma mariciale nel modo seguene : 9 6
GEOMETRIA svolgimeno di uno scrio del Gennaio ) Trovare una base per lo spaio delle soluioni del seguene sisema omogeneo: + + 9 + 6. Il sisema può essere scrio in forma mariciale nel modo seguene : 9 6
Introduzione a Matlab Costruzione di Macchine 2 Prof. Sergio Baragetti
 Esercitazioni del corso di Costruzione di Macchine 2 a cura dell ing. Francesco Villa Introduzione a Matlab Costruzione di Macchine 2 Prof. Sergio Baragetti Dalmine - 27/02/2013 Introduzione a Matlab FONDAMENTI
Esercitazioni del corso di Costruzione di Macchine 2 a cura dell ing. Francesco Villa Introduzione a Matlab Costruzione di Macchine 2 Prof. Sergio Baragetti Dalmine - 27/02/2013 Introduzione a Matlab FONDAMENTI
Fondamenti di Informatica
 Fondamenti di Informatica Prof. Christian Esposito Corso di Laurea in Ingegneria Meccanica e Gestionale (Classe I) A.A. 2016/17 OUTLINE Introduzione Esempio 02/39 Introduzione a (1) MATLAB è corredato
Fondamenti di Informatica Prof. Christian Esposito Corso di Laurea in Ingegneria Meccanica e Gestionale (Classe I) A.A. 2016/17 OUTLINE Introduzione Esempio 02/39 Introduzione a (1) MATLAB è corredato
Creare una visualizzazionegrafica. Individuare il macrosettore dell argomento. Entrare nel dettaglio del problema
 Schemaizzae il eso Ceae una isualizzazionegafica ipoducee il caso (pe quano è possibile) su foglio Discussione ciica in base alla eoia geneale Indiiduae il macoseoe dell agomeno Enae nel deaglio del poblema
Schemaizzae il eso Ceae una isualizzazionegafica ipoducee il caso (pe quano è possibile) su foglio Discussione ciica in base alla eoia geneale Indiiduae il macoseoe dell agomeno Enae nel deaglio del poblema
0.1 Formula di Gauss e formula di Stokes
 1.1 Formula di Gauss e formula di Sokes Siano Ω un apero di R 3, F un campo veoriale definio su Ω, S una superficie la cui chiusura è conenua in Ω. Supponiamo inolre che in S si possano disinguere due
1.1 Formula di Gauss e formula di Sokes Siano Ω un apero di R 3, F un campo veoriale definio su Ω, S una superficie la cui chiusura è conenua in Ω. Supponiamo inolre che in S si possano disinguere due
Teoria dei Sistemi Dinamici
 Teoria dei Sistemi Dinamici 01GTG - 0GTG Soluzione dell Esame del 03/11/009 1 Esercizio 1 Sistema meccanico 1.1 Testo Si consideri il sistema meccanico planare schematizzato nella Fig. 1, descritto come
Teoria dei Sistemi Dinamici 01GTG - 0GTG Soluzione dell Esame del 03/11/009 1 Esercizio 1 Sistema meccanico 1.1 Testo Si consideri il sistema meccanico planare schematizzato nella Fig. 1, descritto come
1. Domanda La funzione di costo totale di breve periodo (con il costo espresso in euro) di un impresa è la seguente:
 di un impresa è la seguente:") 1. omanda La funzione di coso oale di breve periodo (con il coso espresso in euro) di un impresa è la seguene: eerminare il coso oale, il coso oale medio, il coso marginale, i cosi oali fissi e i cosi
1. omanda La funzione di coso oale di breve periodo (con il coso espresso in euro) di un impresa è la seguene: eerminare il coso oale, il coso oale medio, il coso marginale, i cosi oali fissi e i cosi