Modello di un sistema dinamico - La funzione di trasferimento - Le variabili I/O - Feed- Forward e Feed- Backward
|
|
|
- Claudia Pasquali
- 5 anni fa
- Visualizzazioni
Transcript
1 Modello di un sistema dinamico - La funzione di trasferimento - Le variabili I/O - Feed- Forward e Feed- Backward
2 Argomenti - Modello di un sistema dinamico - La funzione di trasferimento - Le variabili I/O - Feed- Forward e Feed- Backward
3 Modello di un sistema dinamico Si è definito, nella lezione precedente, un modello matematico come una descrizione matematica del comportamento del sistema reale, o meglio dei legami funzionali che sussistono tra le grandezze d'interesse.
4 Modello di un sistema dinamico Si ricorda anche la definizione di ingresso al sistema come la variabile di controllo u(t), dell uscita come la variabile y(t) e dello stato del sistema come la variabile x(t).
5 Modello di un sistema dinamico Esistono più rappresentazioni del sistema dinamico nel tempo continuo: - rappresentazione ISO (Ingresso/Stato/Uscita); - rappresentazione IO (Ingresso/Uscita). La rappresentazione ISO viene detta anche rappresentazione in equazioni di stato.
6 Modello di un sistema dinamico A sua volta, una rappresentazione ISO può essere suddiviso in: - rappresentazione globale; - rappresentazione locale.
) viene modellata nella")
7 Modello di un sistema dinamico Nella rappresentazione globale, la descrizione della dinamica (x(t)) viene modellata nella forma:
8 Modello di un sistema dinamico In cui la relazione è in forma esplicita e si conoscono tutti gli ingressi dall i-esimo istante ti all istante t. In realtà, questo modello è poco applicabile perché raramente le leggi che regolano i fenomeni fisici sono in questa forma.

9 Modello di un sistema dinamico Si sfrutta perciò il modello ISO locale, in cui le leggi di interesse sono espresse dal modello:
10 Modello di un sistema dinamico In cui abbiamo le equazioni dello stato del sistema ẋ(t) (dove ẋ(t) è la derivata dello stato in t) e dell uscita y(t), che sono funzioni del tempo, dello stato nell istante t e dell ingresso nell istante t, e l equazione dello stato nell istante ti nota.

11 Modello di un sistema dinamico Considerando le notevoli quantità delle grandezze in gioco, il sistema di equazioni sopra descritto può essere riportato esplicitamente nella forma matriciale:
12 Modello di un sistema dinamico Dove u, y, x rappresentano rispettivamente i vettori delle variabili reali d ingresso, d uscita e di stato. A(t), B(t), C(t), D(t) sono matrici dipendenti dalla variabile temporale e dalle caratteristiche parametriche del sistema in oggetto. La forma matriciale è la più largamente usata per la descrizione dei sistemi lineari tempo varianti (LTV).
 è modellabile attraverso la rappresentazione")
13 Modello di un sistema dinamico Un sistema tempo continuo, lineare tempo invariante (LTI) è modellabile attraverso la rappresentazione ingresso/stato/uscita:
14 Modello di un sistema dinamico
15 Modello di un sistema dinamico Prima di introdurre il modello del sistema dinamico nel dettaglio, è necessario richiamare la definizione di trasformata di Laplace ed alcune trasformate fondamentali, che verranno largamente utilizzate nel dominio della frequenza.
16 Modello di un sistema dinamico Si ricorda che la trasformata di Laplace è definita come: E si riportano alcune delle trasformate fondamentali in tabella.
17 Modello di un sistema dinamico
18 Modello di un sistema dinamico Inoltre, è importante introdurre alcune operazioni nel dominio di Laplace che occorreranno per la comprensione dei modelli nel dominio della frequenza. Si tratta di: - Derivata nel dominio di Laplace; - Integrale nel dominio di Laplace; - Ritardo temporale nel dominio di Laplace; - Convoluzione.
19 Modello di un sistema dinamico Derivata nel dominio di Laplace
20 Modello di un sistema dinamico Integrale nel dominio di Laplace
21 Modello di un sistema dinamico Ritardo temporale nel dominio di Laplace Partendo dalla funzione elementare: Posso introdurre un generico ritardo in una funzione:
22 Modello di un sistema dinamico Ritardo temporale nel dominio di Laplace Andando a trasformare ottengo:
23 Convoluzione Modello di un sistema dinamico A partire dalla funzione in t: Trasformando si ottiene:

24 Modello di un sistema dinamico A partire dal sistema di equazioni: E possibile passare dal dominio del tempo al dominio della frequenza adoperando la Laplace - trasformata.

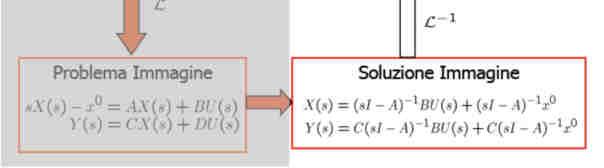
25 Modello di un sistema dinamico Applicando la trasformata di Laplace al sistema iniziale, si ha:
 e Y(s) si ottiene: Dove con l esponente -1 sono indicate le matrici")
26 Funzione di trasferimento Esplicitando il sistema di equazioni rispetto ad X(s) e Y(s) si ottiene: Dove con l esponente -1 sono indicate le matrici inverse.
27 Funzione di trasferimento E possibile dare un interpretazione delle equazioni sopra scritte in funzione delle evoluzioni dello stato e dell uscita. Infatti i primi membri delle due equazioni, dipendenti dallo stato iniziale del sistema, sono riconducibili all evoluzione della risposta libera, mentre i secondi membri, dipendenti dagli ingressi del sistema, sono riconducibili all evoluzione della risposta forzata.

28 Funzione di trasferimento Sfruttando il principio di sovrapposizione degli effetti si ha: Dove con l indice l si intende l evoluzione libera e con l indice f l evoluzione forzata.
29 Modello di un sistema dinamico A questo punto è possibile introdurre la relazione tra le variabili di ingresso (U(s)) e di uscita ((s)) nel dominio della variabile s o più comunemente nel dominio della frequenza. Come si vedrà, la funzione di trasferimento permette di studiare le caratteristiche del sistema in frequenza.
30 Funzione di trasferimento La matrice G(s) che mette in relazione gli ingressi e le uscite del sistema viene chiamata Funzione di Trasferimento (FdT) del sistema dinamico:
31 Funzione di trasferimento
32 Funzione di trasferimento G(s), funzione di trasferimento, è anche definibile come la trasformata di Laplace della risposta all impulso del sistema, visto che la trasformata di U(s) è pari ad 1 se l ingresso è un impulso.
33 Funzione di trasferimento La F.d.T. G(s) può essere rappresentata in varie forme: 1. Forma razionale fratta: 2. Forma poli-zeri:
34 Funzione di trasferimento 3. Forma a costanti di tempo (o di Bode):
35 Forma razionale fratta Funzione di trasferimento La F.d.T., che si ricorda essere espressa in funzione di s, quindi nel dominio dei numeri complessi, è posta nella forma dove il denominatore D(s) ha grado n, mentre il numeratore N(s) deve necessariamente avere grado m n.
36 Forma razionale fratta Funzione di trasferimento Esplicitando in funzione dei vari termini, si ha: Dove b0,, bn sono i coefficienti del polinomio N(s) e a0,, an sono i coefficienti del polinomio D(s).
37 Forma poli - zeri Funzione di trasferimento Un polinomio di grado n a coefficienti reali ammette nel piano complesso n radici, reali o a coppie complesse e complesse coniugate (a parte immaginaria negativa). Nel piano complesso si avrà una rappresentazione come di seguito riportato.
38 Forma poli - zeri Funzione di trasferimento
39 Forma poli - zeri Funzione di trasferimento Facendo sempre riferimento iniziale alla forma Si possono scomporre i polinomi nella forma poli zeri.
40 Forma poli - zeri Funzione di trasferimento Gli zeri della funzione di trasferimento sono le radici del numeratore N(s) (numero minore o uguale a n). I poli della funzione di trasferimento sono le radici del denominatore D(s) (numero uguale a n).
41 Forma poli - zeri Funzione di trasferimento La F.d.T. fratta può essere rappresentata con le produttorie in cui compaiono gli zeri e i poli della funzione. dove ρ è la costante di trasferimento, zi sono gli zeri della funzione, pi sono i poli.
42 Forma poli - zeri Funzione di trasferimento Si può a tal proposito riportare un esempio. Si consideri la FdT: La funzione presenta: poli in: s = 0, s = 1, s = 2 zeri in: s = 4
43 Forma poli - zeri Funzione di trasferimento La funzione può essere scomposta, mediante il criterio di Routh per la ricerca dei poli e degli zeri, nella forma: Che rappresenta la forma poli zeri cercata.
44 Forma poli - zeri Funzione di trasferimento Inoltre, i poli e gli zeri sono collocati nel piano complesso graficamente con una crocetta e un pallino. Presa una funzione Che presenta due zeri, in s = j e s = j, e tre poli, in s = 0, s = 1 e s = 2, essi possono essere rappresentati come di seguito.
45 Forma poli - zeri Funzione di trasferimento
46 Funzione di trasferimento Forma di Bode (a costanti di tempo) Una possibile rappresentazione della funzione di trasferimento è detta forma di Bode, particolarmente utile poiché mette in evidenza i soli parametri caratteristici reali della risposta del sistema.
47 Funzione di trasferimento Forma di Bode (a costanti di tempo) Per ottenere la rappresentazione con soli numeri reali bisogna accorpare i termini complessi e complessi coniugati in polinomi di secondo grado a radici complesse.
48 Funzione di trasferimento Forma di Bode (a costanti di tempo) Questi polinomi, a loro volta sono espressi per mezzo di due parametri particolarmente significativi, indicati con ζ e ωn. ωn infatti, rappresenta la pulsazione naturale dei poli complessi coniugati, mentre ζ rappresenta il loro smorzamento.
49 Funzione di trasferimento Forma di Bode (a costanti di tempo) Raggruppando le radici complesse e complesse coniugate in un polinomio: Le radici del polinomio risultano essere
50 Funzione di trasferimento Forma di Bode (a costanti di tempo) Il significato grafico dei parametri ζ e ωn è di seguito illustrato.
51 Funzione di trasferimento Forma di Bode (a costanti di tempo) Nel piano complesso, ωn è il modulo delle due radici, ossia la loro distanza dall origine, mentre lo smorzamento ζ è il coseno dell angolo α formato dalla congiungente l origine con le radici, rispetto al semiasse reale negativo.
52 Funzione di trasferimento Forma di Bode (a costanti di tempo) Poiché la parte reale dei poli vale ζωn e ωn è un numero positivo, si ha: ζ>0: due radici nel semipiano sinistro; ζ=0: due radici sull asse immaginario; ζ<0: due radici nel semipiano destro.
53 Funzione di trasferimento Forma di Bode (a costanti di tempo) Possiamo a questo punto esprimere la funzione di trasferimento per mezzo di soli parametri reali nella seguente forma:
54 Funzione di trasferimento Forma di Bode (a costanti di tempo) L espressione realmente utilizzata, fa comparire quello che prende il nome di guadagno statico della funzione di trasferimento. Questo si ottiene ponendo s=0 nella FdT e corrisponde al rapporto tra ingresso e uscita all equilibrio.
 La rappresentazione di G(s) in forma di Bode")
55 Funzione di trasferimento Forma di Bode (a costanti di tempo) La rappresentazione di G(s) in forma di Bode sarà:
56 Funzione di trasferimento Forma di Bode (a costanti di tempo) I termini sono: s g indica il numero di poli o zeri nell origine (s=0). Se g (tipo) è positivo, corrisponde al numero di poli in s=0, se è negativo, al numero di zeri in s=0. αni, ωni pulsazioni naturali, relative a ciascuna coppia di zeri o poli complessi coniugati; τi, Ti costanti di tempo che determinano la rapidità con il quale vengono assorbite le evoluzioni transitorie;
57 Funzione di trasferimento Forma di Bode (a costanti di tempo) K guadagno del sistema; ζi smorzamenti delle coppie di zeri complessi coniugati; ξi smorzamenti delle coppie di poli complessi coniugati;
58 Funzione di trasferimento Forma di Bode (a costanti di tempo) Per rendere più chiara la formalizzazione adottata, facciamo un esempio numerico. Si porti nella forma di Bode la seguente FdT e se ne indichi tipo, guadagno, costanti di tempo degli zeri e dei poli.
59 Funzione di trasferimento Forma di Bode (a costanti di tempo) Volendo portare la FdT nella forma Si risolvono le equazioni omogenee al numeratore e al denominatore
60 Funzione di trasferimento Forma di Bode (a costanti di tempo) Così facendo si ottiene Dove: Tipo g = 1; Guadagno μ = 1/4; Costante di tempo dello zero Tz1 = 0.5; Costanti di tempo dei poli: Tp1 = 1, Tp2 = 0.25, Tp3 = 0.5.
61 Le variabili I/O Finora ci si è concentrati sulla funzione di trasferimento del sistema dinamico. Vediamo ora come ricavare, in prima battuta, l uscita di un sistema dinamico LTI Y(s) sollecitato da un ingresso di forzamento U(s).
62 Le variabili I/O Per far ciò bisogna: 1. Ricavare, se non è già data, la funzione di trasferimento G(s) del sistema; 2. Ricavare la trasformata U(s) dell ingresso; 3. Calcolare la trasformata dell uscita Y(s) = G(s)U(s).
63 Le variabili I/O Una volta ricavata la risposta nel dominio della frequenza, si può anti trasformare ottenendo l andamento della risposta del sistema nel dominio del tempo.

64 Le variabili I/O
65 Le variabili I/O Ora che si hanno a disposizione gli strumenti adatti, facciamo un esempio di sistema modellabile con le funzioni di trasferimento.
66 Le variabili I/O Supponiamo di avere un circuito RLC del tipo:
67 Le variabili I/O Considerando la schematizzazione a blocchi, possiamo scrivere l equazione nella forma:
68 Le variabili I/O Trasformando nel dominio di Laplace: Ovvero:
, per il circuito RLC")
69 Le variabili I/O Quindi possiamo trovare il legame ingresso uscita come: E definire la FdT, G(s), per il circuito RLC come:

70 Le variabili I/O Si è capaci di trovare i parametri caratteristici come in seguito: Poli: Zeri: nessuno Tipo: g = 0 Guadagno: μ = 1
71 Le variabili I/O Stabilità Una volta ricavato il legame ingresso uscita e la funzione di trasferimento di un sistema dinamico, è possibile valutarne alcune caratteristiche fondamentali, come la stabilità.
72 Le variabili I/O Stabilità Si supponga di avere un sistema dinamico LTI a cui si applichi in ingresso, all istante t=0, un impulso, ovvero una perturbazione di ampiezza molto elevata e di durata brevissima.
73 Le variabili I/O Stabilità La risposta del sistema alla sollecitazione applicata può essere di tre tipi: l uscita converge al valore iniziale; l uscita non converge al valore iniziale, ma non diverge; l uscita diverge.

74 Stabilità Le variabili I/O
75 Stabilità Le variabili I/O
76 Le variabili I/O Stabilità La risposta al gradino del sistema in oggetto può essere quindi: Semplicemente stabile: La stabilità semplice coincide con la limitatezza della risposta libera per una qualunque condizione iniziale;
77 Le variabili I/O Stabilità Asintoticamente stabile: La stabilità asintotica coincide con la limitatezza e convergenza al valore iniziale per t della risposta libera per una qualunque condizione iniziale; Instabile: L instabilità coincide con l illimitatezza della risposta libera per almeno un valore della condizione iniziale.
78 Le variabili I/O Stabilità La stabilità può essere classificata in: Stabilità interna: associata a perturbazioni delle condizioni iniziali; Stabilità esterna: associata a perturbazioni negli ingressi.
79 Le variabili I/O Stabilità La stabilità esterna analizza l effetto che hanno le perturbazioni in ingresso sull uscita del sistema. Un sistema si definisce BIBO (Bounded Input Bounded Output) stabile se, ad ogni ingresso limitato corrisponde un uscita limitata.
80 Le variabili I/O Stabilità Lo studio della stabilità di un sistema lineare stazionario si riconduce sempre allo studio della posizione delle radici di un polinomio rispetto all asse immaginario.
81 Le variabili I/O Stabilità Condizione necessaria e sufficiente perché un sistema SISO lineare stazionario sia asintoticamente stabile è che la sua funzione di trasferimento presenti poli tutti a parte reale negativa.
82 Stabilità Le variabili I/O
83 Le variabili I/O Stabilità Condizione necessaria e sufficiente perché un sistema SISO lineare stazionario sia semplicemente stabile è che la sua funzione di trasferimento presenti uno o più poli semplici sull asse immaginario e che tutti gli altri poli siano a parte reale negativa.

84 Stabilità Le variabili I/O
85 Le variabili I/O Stabilità Condizione necessaria e sufficiente perché un sistema SISO lineare stazionario sia instabile è che la sua funzione di trasferimento presenti uno o più poli multipli sull asse immaginario oppure uno o più poli a parte reale positiva.
86 Stabilità Le variabili I/O
87 Feed forward e feed backward La retroazione (feedback in inglese) è una configurazione dei sistemi dinamici che permette al sistema di inseguire un valore desiderato dell uscita confrontandolo istante per istante con l uscita effettiva.
88 Feed forward e feed backward In un controllo in retroazione il valore della variabile in uscita dal sistema viene letto dal controllore che agisce modificando l ingresso del sistema. Questa caratteristica differenzia i sistemi retroazionati (ad anello chiuso) dai sistemi non retroazionati (ad anello aperto).
89 Feed forward e feed backward Nei sistemi di controllo ad anello aperto (feed forward) il valore della variabile manipolabile viene determinato a priori sfruttando dei modelli matematici; tali sistemi vengono chiamati predittivi perché non viene effettuata nessuna verifica sul valore.
90 Feed forward e feed backward Un sistema feed forward è del tipo:
91 Feed forward e feed backward Nei sistemi di controllo retroazionati, invece, il valore viene determinato e corretto in base alla misura della variabile controllata e al confronto con la variabile di set point, quindi il valore di set-point viene inseguito in base all errore che lo separa dall uscita effettiva.
92 Feed forward e feed backward Un sistema feed backward è del tipo:
93 Feed forward e feed backward Si parla di retroazione positiva quando l uscita del sistema va ad amplificare il funzionamento del sistema stesso, sommandosi al valore di ingresso. I sistemi con retroazione positiva sono facilmente instabili e tipicamente portano il sistema a divergere.
94 Feed forward e feed backward Un esempio di retroazione positiva è rappresentato dal suono amplificato in uscita da un altoparlante che ritorna al microfono che lo ha generato, si avverte un acuto sibilo o una vibrazione grave continua. Questo è dovuto al fatto che il suono che entra nel microfono viene amplificato e mandato agli altoparlanti; se questo ritorna al microfono, si forma una retroazione positiva che lo amplifica all infinito.
95 Feed forward e feed backward d r + + e C u P
96 Feed forward e feed backward Si parla di retroazione negativa quando l uscita del sistema viene sottratta al valore di set point. I sistemi con retroazione negativa sono in genere stabili e tipicamente portano il sistema a convergere.
97 Feed forward e feed backward
98 Feed forward e feed backward Il tempo che trascorre tra il momento in cui l azione di controllo viene messa in atto e il momento in cui l effetto perviene all uscita del sistema viene definito ritardo nell anello di retroazione. Quando questo ritardo è elevato si possono avere problemi di stabilità anche nei sistemi con retroazione negativa spesso dando vita a fenomeni oscillatori.
99 Feed forward e feed backward La funzione di trasferimento di un sistema feed backward è del tipo: Dove H(s) è la FdT del blocco di retroazione.
 rispetto ad α (uno qualsiasi dei parametri")

100 Feed forward e feed backward Si definisce sensibilità di G(s) rispetto ad α (uno qualsiasi dei parametri caratteristici del sistema) il rapporto tra la variazione di G e la variazione percentuale di α, definizione sintetizzata nella formula:
101 Feed forward e feed backward Si possono definire, inoltre, la funzione sensibilità diretta, che tende a 0 per guadagni di anello elevati, come:
102 Feed forward e feed backward Mentre la funzione sensibilità inversa, che tende ad 1 per guadagni di anello elevati, è definita come: Naturalmente:
103 Feed forward e feed backward Si consideri ora il problema della stabilità per sistemi retroazionati. Uno dei criteri più diffusi nello studio dei sistemi dinamici è rappresentato dal criterio di stabilità di Bode per sistemi retroazionati.
104 Feed forward e feed backward Preso un generico sistema in retroazione unitaria, del tipo:
105 Feed forward e feed backward Una volta tracciati i diagrammi di Bode (in modulo e fase, come definito nella lezione precedente), si calcolano il margine di guadagno (mg) ed il margine di fase (mφ) definiti come: il margine di fase di un generico impianto G(s) in retroazione unitaria è dato da:
106 Feed forward e feed backward Dove G(jω) db=0 è la fase della funzione calcolata per la frequenza ω, detta pulsazione di taglio (o di crossover) in cui la curva del modulo interseca l asse delle ascisse. il margine di guadagno di un generico impianto G(s) in retroazione unitaria è dato da:
107 Feed forward e feed backward Dove G(jω) ω 180 è il modulo calcolato nel punto in cui la fase della funzione è pari a 180. Per il criterio di Bode un sistema in retroazione è stabile se il margine di guadagno ed il margine di fase sono positivi.
108 Feed forward e feed backward
109 Feed forward e feed backward
110 Feed forward e feed backward Si riportano ora le operazioni fondamentali da applicare con gli schemi a blocchi, che serviranno per calcolare l uscita Y(s), o qualsiasi altra grandezza del sistema, nel caso di più blocchi in serie o parallelo e nel caso della presenza di nodi sommatori.
111 Feed forward e feed backward Il blocco non è altro che un simbolo indicante la presenza di un sistema dinamico, avente la funzione di trasferimento riportata nel simbolo del blocco, e l ingresso e l uscita riportati rispettivamente sulla freccia entrante e sulla freccia uscente dal blocco.
112 Feed forward e feed backward Il nodo sommatore, è un nodo la cui uscita è data dalla somma algebrica dei segnali che entrano in esso, ciascuno preso con il proprio segno.
113 Feed forward e feed backward Il punto di diramazione è caratterizzato dall avere tutti i segnali uscenti uguali al segnale entrante nel punto.
114 Feed forward e feed backward Due sistemi si dicono in cascata (o in serie) se l uscita dell uno è l ingresso dell altro.
115 Feed forward e feed backward La funzione di trasferimento dell uscita, tenendo conto di tutti i blocchi in cascata, vale:
116 Feed forward e feed backward Quindi: La FdT del sistema costituito dalla cascata di due sottosistemi è data dal prodotto delle due funzioni di trasferimento parziali.
117 Feed forward e feed backward Due sistemi sono in parallelo se hanno lo stesso ingresso. Le loro uscite si sommano algebricamente per determinare l uscita del sistema.
118 Feed forward e feed backward La funzione di trasferimento dell uscita, tenendo conto di tutti i blocchi in parallelo, vale:
119 Feed forward e feed backward Quindi: La FdT del sistema costituito dal parallelo di due sottosistemi è data dalla somma algebrica delle due funzioni di trasferimento parziali.
120 Feed forward e feed backward Due sistemi si dicono connessi in retroazione quando l uscita del primo blocco è l ingresso del secondo, mentre l uscita del secondo blocco si somma o si sottrae all ingresso del primo.
121 Feed forward e feed backward
122 Feed forward e feed backward Se la retroazione è positiva, la funzione di trasferimento dell uscita vale: Quindi:
123 Feed forward e feed backward
124 Feed forward e feed backward Se la retroazione è negativa, la funzione di trasferimento dell uscita vale: Quindi:
Per un corretto funzionamento dei sistema si progetta un controllo a retroazione secondo lo schema di figura.
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Automatica. Unità 2 Calcolo del movimento di sistemi dinamici LTI
 Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Prova scritta di Controlli Automatici
 Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA 2011 2012 10 Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare
Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA 2011 2012 10 Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Studio di funzione. Tutti i diritti sono riservati. E vietata la riproduzione, anche parziale, senza il consenso dell autore. Funzioni elementari 2
 Studio di funzione Copyright c 2009 Pasquale Terrecuso Tutti i diritti sono riservati. E vietata la riproduzione, anche parziale, senza il consenso dell autore. Funzioni elementari 2 Studio di funzione
Studio di funzione Copyright c 2009 Pasquale Terrecuso Tutti i diritti sono riservati. E vietata la riproduzione, anche parziale, senza il consenso dell autore. Funzioni elementari 2 Studio di funzione
FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI
 FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI Guida alla soluzione degli esercizi d esame Dott. Ing. Marcello Bonfè Esercizi sulla scomposizione di modelli nello spazio degli stati: Gli esercizi nei
FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI Guida alla soluzione degli esercizi d esame Dott. Ing. Marcello Bonfè Esercizi sulla scomposizione di modelli nello spazio degli stati: Gli esercizi nei
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Risposta temporale: esercizi
 ...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
Lezione 5. Schemi a blocchi
 Lezione 5 Schemi a blocchi Elementi costitutivi di uno schema a blocchi Gli schemi a blocchi costituiscono un formalismo per rappresentare graficamente le interazioni tra sistemi dinamici. Vediamone gli
Lezione 5 Schemi a blocchi Elementi costitutivi di uno schema a blocchi Gli schemi a blocchi costituiscono un formalismo per rappresentare graficamente le interazioni tra sistemi dinamici. Vediamone gli
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Definizione Dati due insiemi A e B, contenuti nel campo reale R, si definisce funzione reale di variabile reale una legge f : A
 Scopo centrale, sia della teoria statistica che della economica, è proprio quello di esprimere ed analizzare le relazioni, esistenti tra le variabili statistiche ed economiche, che, in linguaggio matematico,
Scopo centrale, sia della teoria statistica che della economica, è proprio quello di esprimere ed analizzare le relazioni, esistenti tra le variabili statistiche ed economiche, che, in linguaggio matematico,
TECNICHE DI CONTROLLO
 TECNICHE DI CONTROLLO Richiami di Teoria dei Sistemi Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Sistemi e Modelli Concetto di Sistema Sistema: insieme, artificialmente isolato
TECNICHE DI CONTROLLO Richiami di Teoria dei Sistemi Dott. Ing. SIMANI SILVIO con supporto del Dott. Ing. BONFE MARCELLO Sistemi e Modelli Concetto di Sistema Sistema: insieme, artificialmente isolato
Sistemi Web per il turismo - lezione 3 -
 Sistemi Web per il turismo - lezione 3 - Software Si definisce software il complesso di comandi che fanno eseguire al computer delle operazioni. Il termine si contrappone ad hardware, che invece designa
Sistemi Web per il turismo - lezione 3 - Software Si definisce software il complesso di comandi che fanno eseguire al computer delle operazioni. Il termine si contrappone ad hardware, che invece designa
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
ITCS Erasmo da Rotterdam. Anno Scolastico 2014/2015. CLASSE 4^ M Costruzioni, ambiente e territorio
 ITCS Erasmo da Rotterdam Anno Scolastico 014/015 CLASSE 4^ M Costruzioni, ambiente e territorio INDICAZIONI PER IL LAVORO ESTIVO DI MATEMATICA e COMPLEMENTI di MATEMATICA GLI STUDENTI CON IL DEBITO FORMATIVO
ITCS Erasmo da Rotterdam Anno Scolastico 014/015 CLASSE 4^ M Costruzioni, ambiente e territorio INDICAZIONI PER IL LAVORO ESTIVO DI MATEMATICA e COMPLEMENTI di MATEMATICA GLI STUDENTI CON IL DEBITO FORMATIVO
Sistema dinamico a tempo continuo
 Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Funzioni di trasferimento
Fondamenti di Automatica Funzioni di trasferimento Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Funzioni di trasferimento
Criteri di stabilità (ver. 1.2)
") Criteri di stabilità (ver. 1.2) 1 1.1 Il concetto di stabilità Il concetto di stabilità è piuttosto generale e può essere definito in diversi contesti. Per i problemi di interesse nell area dei controlli
Criteri di stabilità (ver. 1.2) 1 1.1 Il concetto di stabilità Il concetto di stabilità è piuttosto generale e può essere definito in diversi contesti. Per i problemi di interesse nell area dei controlli
Fondamenti di Automatica
 Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. Analisi
Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. Analisi
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Lezione 12 Argomenti
 Lezione 12 Argomenti Costi di produzione: differenza tra costo economico e costo contabile I costi nel breve periodo Relazione di breve periodo tra funzione di produzione, produttività del lavoro e costi
Lezione 12 Argomenti Costi di produzione: differenza tra costo economico e costo contabile I costi nel breve periodo Relazione di breve periodo tra funzione di produzione, produttività del lavoro e costi
Il Principio dei lavori virtuali
 Il Principio dei lavori virtuali Il P..V. rientra nella classe di quei principi energetici che indicano che i sistemi evolvono nel senso di minimizzare l energia associata ad ogni stato di possibile configurazione.
Il Principio dei lavori virtuali Il P..V. rientra nella classe di quei principi energetici che indicano che i sistemi evolvono nel senso di minimizzare l energia associata ad ogni stato di possibile configurazione.
Diagrammi di Bode. I Diagrammi di Bode sono due: 1) il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione
 il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione") 0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO
 LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
6. Trasformate e Funzioni di Trasferimento
 6. Trasformate e Funzioni di Trasferimento 6.3 Richiami sulla Trasformata di Laplace Definizione La trasformata di Laplace di f(t) è la funzione di variabile complessa s C, (s = σ + jω), F (s) = e st f(t)dt
6. Trasformate e Funzioni di Trasferimento 6.3 Richiami sulla Trasformata di Laplace Definizione La trasformata di Laplace di f(t) è la funzione di variabile complessa s C, (s = σ + jω), F (s) = e st f(t)dt
Classificazione Singolarità isolate, Serie di Laurent, Residui, Teorema dei residui e applicazioni
 Classificazione Singolarità isolate, Serie di Laurent, Residui, Teorema dei residui e applicazioni Docente:Alessandra Cutrì Richiamo:Zeri di Funzioni olomorfe (o analitiche) Sia f : A C C A aperto connesso,
Classificazione Singolarità isolate, Serie di Laurent, Residui, Teorema dei residui e applicazioni Docente:Alessandra Cutrì Richiamo:Zeri di Funzioni olomorfe (o analitiche) Sia f : A C C A aperto connesso,
Trasformate di Laplace
 TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
La funzione di trasferimento
 Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
ESERCIZI DEL CORSO DI INFORMATICA
 ESERCIZI DEL CORSO DI INFORMTIC Questa breve raccolta di esercizi vuole mettere in luce alcuni aspetti della prima parte del corso e fornire qualche spunto di riflessione. Il contenuto del materiale seguente
ESERCIZI DEL CORSO DI INFORMTIC Questa breve raccolta di esercizi vuole mettere in luce alcuni aspetti della prima parte del corso e fornire qualche spunto di riflessione. Il contenuto del materiale seguente
CORSO di AUTOMAZIONE INDUSTRIALE
 CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
MINISTERO DELL'ISTRUZIONE, DELL'UNIVERSITÀ, DELLA RICERCA SCUOLE ITALIANE ALL ESTERO
 Sessione Ordinaria in America 4 MINISTERO DELL'ISTRUZIONE, DELL'UNIVERSITÀ, DELLA RICERCA SCUOLE ITALIANE ALL ESTERO (Americhe) ESAMI DI STATO DI LICEO SCIENTIFICO Sessione Ordinaria 4 SECONDA PROVA SCRITTA
Sessione Ordinaria in America 4 MINISTERO DELL'ISTRUZIONE, DELL'UNIVERSITÀ, DELLA RICERCA SCUOLE ITALIANE ALL ESTERO (Americhe) ESAMI DI STATO DI LICEO SCIENTIFICO Sessione Ordinaria 4 SECONDA PROVA SCRITTA
Segnali e Sistemi. Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici. Gianni Borghesan e Giovanni Marro
 Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
FONDAMENTI DI AUTOMATICA (Ingegneria Gestionale) Prof. Matteo Corno
 Prof. Matteo Corno") POLITECNICO DI MILANO FONDAMENTI DI AUTOMATICA (Ingegneria Gestionale) Anno Accademico 2014/15 Seconda Prova in Itinere 12/02/2015 COGNOME... NOME... MATRICOLA... FIRMA.... Verificare che il fascicolo
POLITECNICO DI MILANO FONDAMENTI DI AUTOMATICA (Ingegneria Gestionale) Anno Accademico 2014/15 Seconda Prova in Itinere 12/02/2015 COGNOME... NOME... MATRICOLA... FIRMA.... Verificare che il fascicolo
PROBLEMI DI SCELTA dipendenti da due variabili d azione
 prof. Guida PROBLEMI DI SCELTA dipendenti da due variabili d azione in un problema di programmazione lineare, si ricorda che la funzione obiettivo z=f(x,y)=ax+by+c assume il suo valore massimo (o minimo)
prof. Guida PROBLEMI DI SCELTA dipendenti da due variabili d azione in un problema di programmazione lineare, si ricorda che la funzione obiettivo z=f(x,y)=ax+by+c assume il suo valore massimo (o minimo)
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO
 A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Protocollo dei saperi imprescindibili Ordine di scuola: professionale
 Protocollo dei saperi imprescindibili Ordine di scuola: professionale DISCIPLINA: MATEMATICA RESPONSABILE: CAGNESCHI F. IMPERATORE D. CLASSE: prima servizi commerciali Utilizzare le tecniche e le procedure
Protocollo dei saperi imprescindibili Ordine di scuola: professionale DISCIPLINA: MATEMATICA RESPONSABILE: CAGNESCHI F. IMPERATORE D. CLASSE: prima servizi commerciali Utilizzare le tecniche e le procedure
Funzioni di trasferimento. Lezione 14 2
 Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Control System Toolbox
 Control System Toolbox E` un insieme di funzioni per l analisi di sistemi dinamici (tipicamente lineari tempo invarianti o LTI) e per la sintesi di controllori (in particolare a retroazione). All'interno
Control System Toolbox E` un insieme di funzioni per l analisi di sistemi dinamici (tipicamente lineari tempo invarianti o LTI) e per la sintesi di controllori (in particolare a retroazione). All'interno
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
Cristian Secchi Pag. 1
 CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel. 0522 522235 e-mail: cristian.secchi@unimore.it http://www.dismi.unimo.it/members/csecchi Richiami di Controlli
CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel. 0522 522235 e-mail: cristian.secchi@unimore.it http://www.dismi.unimo.it/members/csecchi Richiami di Controlli
PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso
 PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso Prof. Bruno Picasso LEZIONI: Introduzione al corso. Introduzione ai sistemi dinamici. I sistemi dinamici come sistemi di equazioni differenziali; variabili
PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso Prof. Bruno Picasso LEZIONI: Introduzione al corso. Introduzione ai sistemi dinamici. I sistemi dinamici come sistemi di equazioni differenziali; variabili
Cristian Secchi Pag. 1
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
LUOGO DELLE RADICI. G(s) H(s) 1+KG(s)H(s)=0
 H(s) 1+KG(s)H(s)=0") LUOGO DELLE RADICI Il progetto accurato di un sistema di controllo richiede la conoscenza dei poli del sistema in anello chiuso e dell influenza che su di essi hanno le variazioni dei più importanti parametri
LUOGO DELLE RADICI Il progetto accurato di un sistema di controllo richiede la conoscenza dei poli del sistema in anello chiuso e dell influenza che su di essi hanno le variazioni dei più importanti parametri
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Elettronica analogica: cenni
 Elettronica analogica: cenni VERSIONE 23.5.01 valle del componente di acquisizione dati nella struttura funzionale di un sistema di misura: misurando x y y z sens elab pres ambiente w abbiamo già considerato
Elettronica analogica: cenni VERSIONE 23.5.01 valle del componente di acquisizione dati nella struttura funzionale di un sistema di misura: misurando x y y z sens elab pres ambiente w abbiamo già considerato
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
Illustrazione 1: Telaio. Piantanida Simone 1 G Scopo dell'esperienza: Misura di grandezze vettoriali
 Piantanida Simone 1 G Scopo dell'esperienza: Misura di grandezze vettoriali Materiale utilizzato: Telaio (carrucole,supporto,filo), pesi, goniometro o foglio con goniometro stampato, righello Premessa
Piantanida Simone 1 G Scopo dell'esperienza: Misura di grandezze vettoriali Materiale utilizzato: Telaio (carrucole,supporto,filo), pesi, goniometro o foglio con goniometro stampato, righello Premessa
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
MATLAB Analisi di Sistemi LTI
 Esercitazione 1/30 MATLAB Analisi di Sistemi LTI Vincenzo LIPPIELLO PRISMA Lab Dipartimento di Informatica e Sistemistica Università di Napoli Federico II vincenzo.lippiello@unina.it www.prisma.unina.it
Esercitazione 1/30 MATLAB Analisi di Sistemi LTI Vincenzo LIPPIELLO PRISMA Lab Dipartimento di Informatica e Sistemistica Università di Napoli Federico II vincenzo.lippiello@unina.it www.prisma.unina.it
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
MATEMATICA GENERALE Prova d esame del 4 giugno 2013 - FILA A
 MATEMATICA GENERALE Prova d esame del 4 giugno 2013 - FILA A Nome e cognome Matricola I Parte OBBLIGATORIA (quesiti preliminari: 1 punto ciascuno). Riportare le soluzioni su questo foglio, mostrando i
MATEMATICA GENERALE Prova d esame del 4 giugno 2013 - FILA A Nome e cognome Matricola I Parte OBBLIGATORIA (quesiti preliminari: 1 punto ciascuno). Riportare le soluzioni su questo foglio, mostrando i
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
RIDUZIONE DELLE DISTANZE
 RIDUZIONE DELLE DISTANZE Il problema della riduzione delle distanze ad una determinata superficie di riferimento va analizzato nei suoi diversi aspetti in quanto, in relazione allo scopo della misura,
RIDUZIONE DELLE DISTANZE Il problema della riduzione delle distanze ad una determinata superficie di riferimento va analizzato nei suoi diversi aspetti in quanto, in relazione allo scopo della misura,
Il Metodo Scientifico
 Unita Naturali Il Metodo Scientifico La Fisica si occupa di descrivere ed interpretare i fenomeni naturali usando il metodo scientifico. Passi del metodo scientifico: Schematizzazione: modello semplificato
Unita Naturali Il Metodo Scientifico La Fisica si occupa di descrivere ed interpretare i fenomeni naturali usando il metodo scientifico. Passi del metodo scientifico: Schematizzazione: modello semplificato
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
FONDAMENTI DI AUTOMATICA. Michele Basso, Luigi Chisci e Paola Falugi
 FONDAMENTI DI AUTOMATICA Michele Basso, Luigi Chisci e Paola Falugi 22 novembre 26 2 Indice 1 Analisi in frequenza di sistemi LTI 5 1.1 Introduzione............................. 5 1.2 Analisi armonica..........................
FONDAMENTI DI AUTOMATICA Michele Basso, Luigi Chisci e Paola Falugi 22 novembre 26 2 Indice 1 Analisi in frequenza di sistemi LTI 5 1.1 Introduzione............................. 5 1.2 Analisi armonica..........................
CORSO DI STATISTICA (parte 1) - ESERCITAZIONE 5
 - ESERCITAZIONE 5") CORSO DI STATISTICA (parte 1) - ESERCITAZIONE 5 Dott.ssa Antonella Costanzo a.costanzo@unicas.it Esercizio 1. Misura dell associazione tra due caratteri Uno store manager è interessato a studiare la relazione
CORSO DI STATISTICA (parte 1) - ESERCITAZIONE 5 Dott.ssa Antonella Costanzo a.costanzo@unicas.it Esercizio 1. Misura dell associazione tra due caratteri Uno store manager è interessato a studiare la relazione
INDICAZIONI PER LA RICERCA DEGLI ASINTOTI VERTICALI
 2.13 ASINTOTI 44 Un "asintoto", per una funzione y = f( ), è una retta alla quale il grafico della funzione "si avvicina indefinitamente", "si avvicina di tanto quanto noi vogliamo", nel senso precisato
2.13 ASINTOTI 44 Un "asintoto", per una funzione y = f( ), è una retta alla quale il grafico della funzione "si avvicina indefinitamente", "si avvicina di tanto quanto noi vogliamo", nel senso precisato
Introduzione. Margine di ampiezza... 2 Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di Bode... 6
 ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
Differenziazione sistemi dinamici
 Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Fondamenti di Automatica
 Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Lezione 3: Il problema del consumatore: Il
 Corso di Economica Politica prof. Stefano Papa Lezione 3: Il problema del consumatore: Il vincolo di bilancio Facoltà di Economia Università di Roma La Sapienza Il problema del consumatore 2 Applichiamo
Corso di Economica Politica prof. Stefano Papa Lezione 3: Il problema del consumatore: Il vincolo di bilancio Facoltà di Economia Università di Roma La Sapienza Il problema del consumatore 2 Applichiamo
Dalle misure eseguite con un segnale sinusoidale su di un impianto si è verificato che esso:
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
NUMERI COMPLESSI. Test di autovalutazione
 NUMERI COMPLESSI Test di autovalutazione 1. Se due numeri complessi z 1 e z 2 sono rappresentati nel piano di Gauss da due punti simmetrici rispetto all origine: (a) sono le radici quadrate di uno stesso
NUMERI COMPLESSI Test di autovalutazione 1. Se due numeri complessi z 1 e z 2 sono rappresentati nel piano di Gauss da due punti simmetrici rispetto all origine: (a) sono le radici quadrate di uno stesso
7 Esercizi e complementi di Elettrotecnica per allievi non elettrici. Circuiti elementari
 7 Esercizi e complementi di Elettrotecnica per allievi non elettrici Circuiti elementari Gli esercizi proposti in questa sezione hanno lo scopo di introdurre l allievo ad alcune tecniche, semplici e fondamentali,
7 Esercizi e complementi di Elettrotecnica per allievi non elettrici Circuiti elementari Gli esercizi proposti in questa sezione hanno lo scopo di introdurre l allievo ad alcune tecniche, semplici e fondamentali,
Sistemi e modelli matematici
 0.0.. Sistemi e modelli matematici L automazione è un complesso di tecniche volte a sostituire l intervento umano, o a migliorarne l efficienza, nell esercizio di dispositivi e impianti. Un importante
0.0.. Sistemi e modelli matematici L automazione è un complesso di tecniche volte a sostituire l intervento umano, o a migliorarne l efficienza, nell esercizio di dispositivi e impianti. Un importante
Proprieta` dei sistemi in retroazione
 Proprieta` dei sistemi in retroazione Specifiche di controllo: errore a regime in risposta a disturbi costanti errore di inseguimento a regime quando il segnale di riferimento e` di tipo polinomiale sensibilita`
Proprieta` dei sistemi in retroazione Specifiche di controllo: errore a regime in risposta a disturbi costanti errore di inseguimento a regime quando il segnale di riferimento e` di tipo polinomiale sensibilita`
Principali comandi MATLAB utili per il corso di Controlli Automatici
 Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
FUNZIONI CONTINUE - ESERCIZI SVOLTI
 FUNZIONI CONTINUE - ESERCIZI SVOLTI 1) Verificare che x è continua in x 0 per ogni x 0 0 ) Verificare che 1 x 1 x 0 è continua in x 0 per ogni x 0 0 3) Disegnare il grafico e studiare i punti di discontinuità
FUNZIONI CONTINUE - ESERCIZI SVOLTI 1) Verificare che x è continua in x 0 per ogni x 0 0 ) Verificare che 1 x 1 x 0 è continua in x 0 per ogni x 0 0 3) Disegnare il grafico e studiare i punti di discontinuità
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
ISTITUTO D'ISTRUZIONE SUPERIORE A. MOTTI
 ISTITUTO D'ISTRUZIONE SUPERIORE A. MOTTI ISTITUTO PROFESSIONALE DI ENOGASTRONOMIA E OSPITALITA ALBERGHIERA CON I PERCORSI: ACCOGLIENZA TURISTICA, CUCINA, SALA-BAR ISTITUTO TECNICO PER IL TURISMO Sede Amministrativa:
ISTITUTO D'ISTRUZIONE SUPERIORE A. MOTTI ISTITUTO PROFESSIONALE DI ENOGASTRONOMIA E OSPITALITA ALBERGHIERA CON I PERCORSI: ACCOGLIENZA TURISTICA, CUCINA, SALA-BAR ISTITUTO TECNICO PER IL TURISMO Sede Amministrativa:
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati
 Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
ELEMENTI DI ANALISI SPETTRALE 1 I DUE DOMINI
 Lezioni di Fisica della Terra Solida, Università di Chieti, a.a. 999/. Docente A. De Santis ELEMENTI DI ANALISI SPETTRALE I DUE DOMINI È spesso utile pensare alle unzioni ed alle loro trasormate di Fourier
Lezioni di Fisica della Terra Solida, Università di Chieti, a.a. 999/. Docente A. De Santis ELEMENTI DI ANALISI SPETTRALE I DUE DOMINI È spesso utile pensare alle unzioni ed alle loro trasormate di Fourier
METODI DI CONVERSIONE FRA MISURE
 METODI DI CONVERSIONE FRA MISURE Un problema molto frequente e delicato da risolvere è la conversione tra misure, già in parte introdotto a proposito delle conversioni tra multipli e sottomultipli delle
METODI DI CONVERSIONE FRA MISURE Un problema molto frequente e delicato da risolvere è la conversione tra misure, già in parte introdotto a proposito delle conversioni tra multipli e sottomultipli delle
Lez. 17/12/13 Funzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione
 Lez. 7/2/3 unzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione consideriamo il risultato del filtro passa alto che si può rappresentare schematicamente nel
Lez. 7/2/3 unzione di trasferimento in azione e reazione, pulsazione complessa, introduzione alla regolazione consideriamo il risultato del filtro passa alto che si può rappresentare schematicamente nel
Esercizi svolti. Elettrotecnica
 Esercizi svolti di Elettrotecnica a cura del prof. Vincenzo Tucci NOVEMBE 00 NOTA SUL METODO PE LA DEGLI ESECIZI La soluzione degli esercizi è un momento della fase di apprendimento nel quale l allievo
Esercizi svolti di Elettrotecnica a cura del prof. Vincenzo Tucci NOVEMBE 00 NOTA SUL METODO PE LA DEGLI ESECIZI La soluzione degli esercizi è un momento della fase di apprendimento nel quale l allievo
MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO
 PIANO DI LAVORO CLASSE 5 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: ALGEBRA DEGLI SCHEMI A BLOCCHI
PIANO DI LAVORO CLASSE 5 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: ALGEBRA DEGLI SCHEMI A BLOCCHI
Brevi appunti di Fondamenti di Automatica 1. prof. Stefano Panzieri Dipartimento di Informatica e Automazione Universitá degli Studi ROMA TRE
 Brevi appunti di Fondamenti di Automatica prof. Dipartimento di Informatica e Automazione Universitá degli Studi ROMA RE ROMA RE UNIVERSIÀ DEGLI SUDI 4 marzo 05 Rev. 0. INDICE Indice La rasfomata di Laplace.0.
Brevi appunti di Fondamenti di Automatica prof. Dipartimento di Informatica e Automazione Universitá degli Studi ROMA RE ROMA RE UNIVERSIÀ DEGLI SUDI 4 marzo 05 Rev. 0. INDICE Indice La rasfomata di Laplace.0.
Syllabus: argomenti di Matematica delle prove di valutazione
 Syllabus: argomenti di Matematica delle prove di valutazione abcdef... ABC (senza calcolatrici, senza palmari, senza telefonini... ) Gli Argomenti A. Numeri frazioni e numeri decimali massimo comun divisore,
Syllabus: argomenti di Matematica delle prove di valutazione abcdef... ABC (senza calcolatrici, senza palmari, senza telefonini... ) Gli Argomenti A. Numeri frazioni e numeri decimali massimo comun divisore,
Esercizi svolti. 1. Si consideri la funzione f(x) = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di
 = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di") Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
ESERCITAZIONE (7-11-13) Ing. Stefano Botelli
 Ing. Stefano Botelli") FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
Elementi di matematica finanziaria
 Elementi di matematica finanziaria 1. Percentuale Si dice percentuale di una somma di denaro o di un altra grandezza, una parte di questa, calcolata in base ad un tanto per cento, che si chiama tasso percentuale.
Elementi di matematica finanziaria 1. Percentuale Si dice percentuale di una somma di denaro o di un altra grandezza, una parte di questa, calcolata in base ad un tanto per cento, che si chiama tasso percentuale.
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
FEDELTÀ DELLA RISPOSTA DEI SISTEMI DI CONTROLLO IN RETROAZIONE: ANALISI DELLA PRECISIONE IN REGIME PERMANENTE
 FEDELTÀ DELLA RISPOSTA DEI SISTEMI DI CONTROLLO IN RETROAZIONE: ANALISI DELLA PRECISIONE IN REGIME PERMANENTE Nello studio dei sistemi di controllo in retroazione spesso si richiede che l uscita segua
FEDELTÀ DELLA RISPOSTA DEI SISTEMI DI CONTROLLO IN RETROAZIONE: ANALISI DELLA PRECISIONE IN REGIME PERMANENTE Nello studio dei sistemi di controllo in retroazione spesso si richiede che l uscita segua