Cristian Secchi Pag. 1
|
|
|
- Martino Ferrario
- 8 anni fa
- Visualizzazioni
Transcript
1 CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel cristian.secchi@unimore.it Richiami di Controlli Automatici Il comportamento ingresso-uscita dei sistemi a tempo continuo può essere descritto da equazioni differenziali, che in generale hanno la forma: Molti sistemi di interesse possono essere descritti da equazioni differenziali lineari a parametri concentrati caratterizzate dalla seguente forma semplificata. I sistemi descritti da queste equazioni sono detti sistemi Lineari Tempo Invarianti (LTI). Se il sistema che si sta modellando è caratterizzato da un solo ingresso e una sola uscita, si parlerà di sistemi single input single output (SISO). CD Pag. 1

2 Richiami di Controlli Automatici Nel corso di Controlli Automatici sono stati trattati sistemi LTI SISO. E possibile passare da una rappresentazione nel dominio dei tempi a una nel dominio complesso e viceversa tramite le operazioni di Trasformata e Antitrasformata di Laplace. Il vantaggio principale nel passare al dominio complesso è che un equazione differenziale viene trasformata in un equazione algebrica più semplice da gestire. CD Richiami di Controlli Automatici Un sistema LTI-SISO può essere descritto nel dominio complesso tramite una Funzione di Trasferimento. La rappresentazione mediante funzione di trasferimento è molto comoda e ha consentito di sviluppare un analisi approfondita del comportamento del sistema, un analisi delle specifiche e svariate tecniche per il progetto di controllori. CD Pag. 2

3 Richiami di Controlli Automatici Lo schema di controllo finale è: r(t) e(t) G c (s) u(t) G p (s) y(t) - Sia il plant che il controllore sono rappresentati da funzioni di trasferimento e, quindi, sono sistemi a tempo continuo. Ma l azione di controllo deve essere implementata su un calcolatore che è un sistema a tempo discreto Occorre sviluppare un framework per la modellazione dei sistemi discreti in modo da poter costruire un azione di controllo che sia implementabile su di un sistema a microprocessore. CD Descrizione di Sistemi a tempo discreto SISTEMI TEMPO-CONTINUI Equazioni differenziali A/D SISTEMI TEMPO-DISCRETI Equazioni alle differenze Trasformata di Laplace D/A Trasformata Z CD Pag. 3

4 Equazioni alle differenze Si supponga di voler elaborare una sequenza di dati discreti e k =e(kt), con k=0,1,2,, per ottenere una sequenza u k =u(kt). Elaborazione In generale: Se la funzione f() è lineare e dipendente solo da un valore finito di valori passati idi u k ed e k, l elaborazione l può essere rappresentata da: equazione lineare alle differenze di ordine n CD Equazioni alle differenze Come per le equazioni differenziali lineari, esiste un metodo per trovare la soluzione in forma chiusa di un equazione alle differenze lineare. Tuttavia, nell ambito dei controlli digitali, ci interesserà molto di più ottenere una forma ricorsiva : e k μp Memoria u k-1 u k-2 u k-3 u k-n e k-1 e k-2 e k-3 u k-m u k Ad ogni istante k, dato un ingresso e k è possibile calcolare, usando i dati in memoria, l uscita u k. CD Pag. 4

5 La trasformata Z La trasformata Z è un metodo utilizzato per studiare i sistemi discreti. Essa rappresenta essenzialmente l'analogo della trasformata di Laplace per i sistemi continui. DEFINIZIONE: Sia data una sequenza di valori x k R, definita per k = 0, 1, 2, e nulla per k < 0. La Z-trasformata (unilatera) della sequenza x k è la funzione di variabile complessa z definita come: La Z-trasformata è definita in una regione del piano complesso z detta dominio di convergenza, cioè nell'insieme dei punti z per i quali la serie converge. CD La trasformata Zeta Nel caso in cui la sequenza di valori x k sia ottenuta campionando uniformemente con periodo T un segnale continuo descritto dalla funzione x(t), t 0, si avrà che x k = x(kt) (o più semplicemente x k = x(k), k = t/t = 0, 1, 2, ) e corrispondentemente si scriverà DIPENDE DAL PERIODO (T) DI CAMPIONAMENTO CD Pag. 5

6 La Z-trasformata Nell ambito dei controlli digitali, X(z) avrà spesso un espressione razionale fratta: p 1, p 2,, p n sono i poli di X(z) mentre z 1,z 2,,z m sono gli zeri di X(z) CD La Z-trasformata Raccogliendo z n sia al numeratore che al denominatore si ottiene una rappresentazione più utilizzata nelle applicazioni controllistiche in cui compaiono solo potenze di z -1 : CD Pag. 6

7 La Z-trasformata Funzioni elementari Impulso discreto unitario. Sia data la funzione, detta anche funzione delta di Kronecker δ 0 (t): Gradino unitario. Sia data la funzione Serie convergente per z > 1 CD La Z-trasformata Funzioni elementari Rampa unitaria. Si consideri la funzione rampa unitaria: Poichè x(kt) = kt, k = 0, 1, 2,, la Z-trasformata è Serie convergente per z > 1 CD Pag. 7

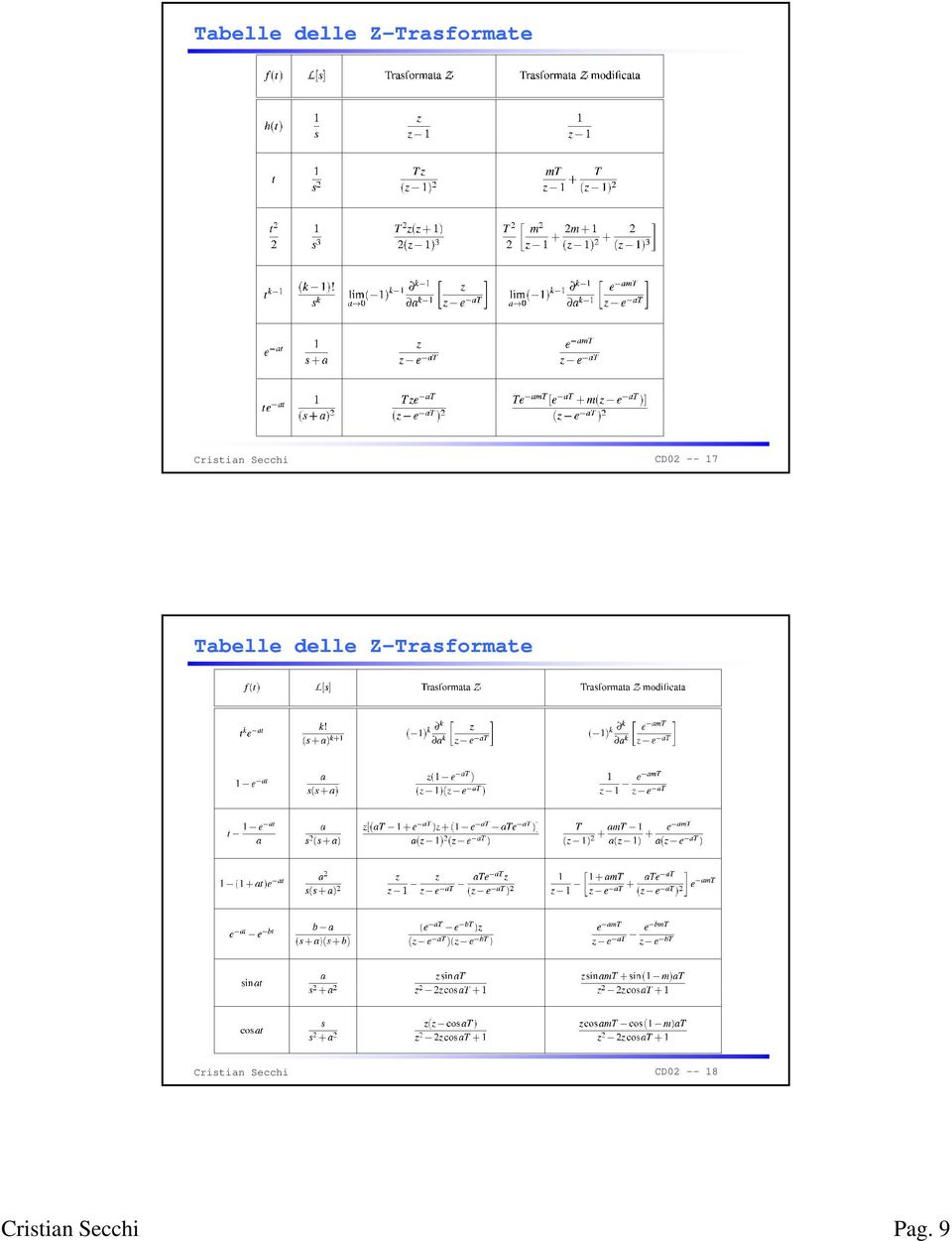
8 La Z-trasformata Funzioni elementari Funzione potenza a k. Sia data la funzione: a costante reale o complessa Dalla definizione si ha Serie convergente per z > a CD La Z-trasformata Le trasformate delle funzioni di maggior interesse sono solitamente riportate in tabelle che vengono consultate per la determinazione di Z- trasformate di funzione generiche, in modo analogo a quanto avviene per le tabelle delle trasformate di Laplace. Tramite le tabelle si possono determinare le Z-trasformate di funzioni di maggior complessità, scomponendo tali funzioni in somme di funzioni più semplici e ricomponendo successivamente le corrispondenti Z-trasformate. Esempio: Determinare la Z-trasformata di CD Pag. 8

9 Tabelle delle Z-Trasformate CD Tabelle delle Z-Trasformate CD Pag. 9
10 La Z-trasformata Dato un segnale x(t) e il periodo di campionamento T, si ottiene una unica X(z) A una X(z) possono corrispondere molte funzioni continue x(t) Questa ambiguità non sussiste se sono verificate le condizioni restrittive e su T del teorema ema di Shannon , y1 y 0 1 x x x x x x t (s) CD Teoremi e proprietà principali Linearità: La Z trasformata è un operatore lineare CD Pag. 10
 CD02 -- 19 Teoremi e proprietà principali Linearità: La Z trasformata è un operatore")
11 Teoremi e proprietà principali Teorema della traslazione nel tempo: Sia dato un segnale x(t), nullo per t<0, e sia X(z) = Z[x(t)]. Per n = 0, 1, 2, si ha che: ritardo anticipo In pratica spesso si scrive, con un certo abuso di notazione: Ingegneria e Tecnologie dei Sistemi di Controllo CD Teoremi e proprietà principali Teorema del valore iniziale: Se X(z) = Z[x(t)] ed esiste allora il valore iniziale x(0) di x(t) è dato da: Infatti si ha che: Ingegneria e Tecnologie dei Sistemi di Controllo CD Pag. 11
![dei Sistemi di Controllo CD02 -- 21 Teoremi e proprietà principali Teorema del valore iniziale: Se X(z) = Z[x(t)] ed esiste allora](/docs-images/40/200166/images/page_11.jpg "il valore iniziale x(0) di x(t) è dato da: Infatti si ha che: Ingegneria e Tecnologie dei Sistemi di Controllo CD02 -- 22 Pag. 11")
12 Teoremi e proprietà principali Teorema del valore finale: Sia X(z) = Z[x(t)] e siano tutti i poli di X(z) entro al cerchio unitario, con al più un polo semplice in z =1. Allora il valore finale di x(k), cioè il valore di x(k) per k!1 è dato da: CD Teoremi e proprietà principali Esempio: Si consideri il segnale descritto da X(kT) = 0, , , , , , , , , , , , , , , , , ,. (T = 1 sec) CD Pag. 12

13 Teoremi e proprietà principali Differenziazione complessa Da cui si deduce che: Questa relazione permette di calcolare Z-trasformate di funzioni a partire da Z-trasformate già note. CD Teoremi e proprietà principali Esempio: Gradino unitario. La Z-trasformata del gradino unitario è Si può usare il teorema della differenziazione complessa per calcolare la Z-trasformata della rampa unitaria x(kt) = kt: CD Pag. 13

14 Teoremi e proprietà principali Integrazione complessa: Si consideri la sequenza dove x(k)/k è finito per k=0 e sia Z[x(k)]=X(z). La Z-trasformata di x(k)/k è data da: CD Teoremi e proprietà principali Teorema della convoluzione reale: Siano date due funzioni x 1 (t) e x 2 (t), con x 1 (t) = x 2 (t) = 0 per t< 0, e siano X 1 (z) e X 2 (z) le corrispondenti Z-trasformate. Allora: CD Pag. 14
 e x 2 (t), con x 1 (t) = x 2 (t) = 0 per t< 0, e")
15 La antitrasformata Z X(z) x(k) La relazione tra X(z) e x(k) è biunivoca: è possibile ottenere la sequenza di dati x(k) a partire dalla X(z) e viceversa. L antitrasformata Z permette di passare da una Z-trasformata X(z) alla corrispondente sequenza x(k). Esistono diversi metodi per antitrasformare una funzione X(z) Metodo della lunga divisione Metodo computazionale Metodo della scomposizione in fratti semplici Metodo dell integrale di inversione CD La antitrasformata Z x(k) x(t) La corrispondenza tra la sequenza campionata x k e il segnale originale x(t) NON è biunivoca. Se è soddisfatto il Teorema di Shannon sul campionamento, la funzione continua x(t) può essere determinata univocamente a partire dalla sequenza x k y0, y1 1 x x x x x x t (s) CD Pag. 15
 x(t) La corrispondenza tra la sequenza campionata x k e il segnale originale x(t) NON è biunivoca.")
16 La antitrasformata Z Il metodo computazionale Si consideri ad esempio la seguente Z trasformata: Essa può essere riscritta come: Dove U(z) è la Z-trasformata t dell impulso l unitario i discreto e vale 1 CD La antitrasformata Z Il metodo computazionale Considerando l operatore z -1 come un ritardo unitario possiamo riscrivere l espressione precedente sotto forma di equazione alle differenze: da cui Le condizioni iniziali, necessarie per risolvere l equazione alle differenze, sono: CD Pag. 16

17 La antitrasformata Z Il metodo computazionale La soluzione dell equazione alle differenze ci dà i termini della sequenza x(kt) Il vantaggio di questo metodo è che l equazione alle differenze da risolvere per trovare la sequenze può essere facilmente scritta in forma ricorsiva in qualsiasi linguaggio di programmazione. CD La antitrasformata Z fratti semplici E l analogo nel discreto della tecnica della scomposizione in fratti semplici utilizzate con le trasformate di Laplace. Infatti, poichè la Z-trasformata è un operatore lineare, è possibile scomporre l'espressione di una X(z) in termini elementari, dai quali si può ricavare l'antitrasformata tramite tabelle, e sommare i vari elementi così ottenuti. In gerale, sia data una Z-trasformata: Per prima cosa occorre calcolare i poli, le radici del polinomio A(z) e riscrivere X(z) come: CD Pag. 17
 in termini elementari, dai quali si può ricavare l'antitrasformata tramite tabelle, e sommare")
18 La antitrasformata Z fratti semplici CASO 1: Tutti i poli di X(z) sono semplici In questo caso si pone: dove i coefficienti c i sono detti residui e sono dati da: CD La antitrasformata Z fratti semplici Se in X(z) vi è almeno uno zero nell origine, si usa X(z)/z: Quando sono presenti poli complessi coniugati, i coefficienti c i sono anch'essi complessi. In questo caso si ricorre alle formule di Eulero per ottenere funzioni trigonometriche a coefficienti reali. L espressione della sequenza x(k) è in forma chiusa ed è data da: CD Pag. 18

19 La antitrasformata Z fratti semplici CASO 2 Vi sono poli multipli in X(z) o in X(z)/z Siamo nella situazione in cui si ha: Possiamo scrivere Dove i residui si calcolano mediante la seguente formula: CD La antitrasformata Z fratti semplici Esempio: Calcolare l'antitrasformata della funzione I due poli risultano z 1 = 1 e z 2 = 0.6. Inoltre, la X(z) puo` essere scritta come Si utilizza quindi la X(z)/z da cui Dalle tabelle si ha quindi che CD Pag. 19
 puo` essere scritta come Si utilizza quindi la X(z)/z da cui Dalle tabelle si ha quindi che CD02 --")
20 La antitrasformata Z fratti semplici Esempio: Antitrasformare la funzione Si ha che e quindi e CD Funzioni di Trasferimento Discrete Considereremo sistemi discreti lineari con un ingresso e un uscita a y 1 k u k S + a y L 2 k 1 + L+ an yk n = b1u k + b2uk y k b u n Elaborazione Discreta k m Applicando la Z trasformata ad entrambi i membri e sfruttando la linearità dell operatore, si ottiene: 1 n 1 m ( a1 + a2z + L+ anz ) Y ( z) = ( b1 + b2 z + L+ bn z ) U ( z) CD Pag. 20
 Y ( z) = ( b1 + b2 z + L+ bn z ) U ( z)")
21 Funzioni di Trasferimento Discrete Y ( z) ( b G z) = = U ( z) ( a + b ( a2z z + L+ bn z + L+ a z G(z) è la funzione di trasferimento del sistema a tempo discreto. Analogamente a quanto succede per i sistemi tempo continui: La sua espressione non dipende dall ingresso, ma è data dalle proprietà del sistema Lega la trasformata Z dell uscita a quella dell ingresso tramite Y(z)=G(z)U(z) E uno strumento molto utile per l analisi di un sistema discreto e per la sintesi di un controllore E razionale fratta e, quindi, molti degli strumenti introdotti per l analisi dei sistemi tempo continui possono essere utilizzati, con opportune modifiche, per i sistemi discreti Le radici del polinomio al denominatore sono dette poli mentre quelle del polinomio al numeratore sono dette zeri. L equazione che si ottiene ponendo uguale a zero il polinomio al denominatore è detta equazione caratteristica. n m n ) ) CD Funzioni di Trasferimento Discrete La funzione di trasferimento può essere interpretata come la Z- trasformata della risposta impulsiva Y ( z) = G( z) U ( z) = G( z) Z[ δ ( k)] = G( z) 1 = G( z) La risposta nel tempo discreto è data dalla sommatoria di convoluzione tra l ingresso e la risposta impulsiva del sistema, detta anche sequenza ponderatrice y( k) = Z 1 [ Y ( z)] = Z 1 [ G( z) U ( z)] Ricordando il teorema della convoluzione reale si ha che: y( k) = k h= 0 g h u k Queste proprietà sono analoghe a quelle della funzione di trasferimento nel dominio di Laplace h CD Pag. 21
22 Funzioni di Trasferimento Discrete E possibile rappresentare un sistema a tempo discreto come un blocco con un ingresso e un uscita. U(z) Y(z) G(z) Un sistema discreto può essere rappresentato dall interconnessione di più blocchi. Le regole di riduzione per gli schemi a blocchi di sistemi discreti sono le stesse che valgono per gli schemi a blocchi di sistemi continui Serie Parallelo Retroazione U(z) G 1 (z) Y(z) G 2 (z) C(z) U(z) G 1 (z) G 2 (z) + + Y(z) U(z) + - G 1 (z) G 2 (z) Y(z) U(z) C(z) H(z) H ( z) = G1 ( z) G2( z) U(z) Y(z) H(z) H ( z) = G1 ( z) + G2( z) U(z) Y(z) H(z) G1 ( z) H ( z) = 1+ G ( z) G ( z) 1 CD Stabilità nei sistemi discreti Analogamente al caso tempo continuo, la stabilità di un sistema tempo discreto è legata alla risposta impulsiva del sistema. Un sistema discreto si dice: Stabile, se la risposta del sistema all impulso discreto rimane limitata Asintoticamente stabile, se è stabile e la risposta del sistema converge asintoticamente a 0 Instabile, se non è stabile Analogamente al caso tempo continuo, la stabilità asintotica e la stabilità ingresso-limitato uscita-limitata coincidono Nelle applicazioni pratiche si è tipicamente interessati alla asintotica stabilità CD Pag. 22
23 Stabilità nei sistemi discreti Analogamente al caso tempo-continuo, il carattere di convergenza della risposta impulsiva dipende solamente dalla posizione dei poli della funzione di trasferimento che rappresenta il sistema tempo discreto. Se il sistema è descritto da una funzione di trasferimento del tipo: con A(z) e B(z) primi tra loro B(z) ( ) G ( z) = A( z) Il sistema è asintoticamente stabile se tutte le radici del polinomio A(z), cioè i poli del sistema, sono entro il cerchio unitario che ha centro nell origine del piano z, ossia se p i <1 per ogni i Il sistema è stabile se tutti i poli con modulo unitario ( p i =1) sono semplici (ossia hanno molteplicità 1), mentre tutti i rimanenti poli sono entro il cerchio unitario Il sistema è instabile se almeno un polo ha modulo strettamente maggiore di uno oppure se esiste un polo con modulo unitario e molteplicità maggiore di 1 La posizione degli zeri NON influisce sulla stabilità del sistema. CD Stabilità nei sistemi discreti - Esempi G ( z ) = z G ( z) = z CD Pag. 23
24 Stabilità nei sistemi discreti - Esempi 1 G ( z ) = z 1 1 G ( z) = z 1 CD Stabilità nei sistemi discreti - Esempi 1 ( z) = z G ( z) = ( z 1) G 2 CD Pag. 24
25 Stabilità nei sistemi discreti L uscita del sistema poteva essere ottenuta direttamente antitrasformando la G(z) Il fatto che la regione di stabilità sia il cerchio unitario, dipende dal fatto che l antritrasformata asfo di G(z) è composta da termini in cui compaiono funzioni potenza anziché esponenziali come nel caso tempo continuo. CD Determinazione della stabilità Per determinare la stabilità è sufficiente verificare la posizione delle radici dell equazione caratteristica rispetto al cerchio unitario. Se l equazione è data da: è possibile n n z L 1 + a1 z + + an = 0 trovare le radici dell equazione mediante un programma di analisi numerica (es. Matlab roots([1 a 1,,a n ]) usare criteri che consentono di determinare la stabilità del sistema senza dover risolvere l equazione caratteristica Criterio di Routh e trasformazione bilineare Criterio di Jury (vedi Bonivento-Zanasi-Melchiorri Cap. 4) CD Pag. 25
26 Criterio di Routh Data un equazione polinomiale di grado n, il criterio di Routh consente di determinare, senza dover risolvere l equazione, se tutte le radici hanno parte reale negativa. Nei sistemi continui, i ciò è sufficiente per determinare e se un sistema è asintoticamente stabile ma questo non è più vero per i sistemi discreti. L idea è quella di trasformare, mediante una trasformazione bilineare, la funzione data G(z) in un altra funzione G(w) di variabile complessa w tale da permettere l applicazione a quest ultima il criterio di Routh. CD Criterio di Routh Si utilizza la seguente trasformazione bilineare z 1+ w z 1 = w = 1 w z + 1 La prima equazione trasforma infatti il cerchio unitario in z nel semipiano sinistro del piano w (permettendo quindi l applicazione del criterio di Routh), mentre la seconda equazione effettua la trasformazione inversa. Verificare che il sistema G(w) abbia tutti i poli a parte reale negativa equivale a verificare che il sistema G(z) abbia tutti i poli all interno del cerchio unitario e che, quindi, sia asintoticamente stabile. CD Pag. 26
27 Criterio di Routh Ponendo w=σ+jω, si può facilmente vedere che il cerchio unitario viene mappato nel semipiano sinistro tramite la trasformazione bilineare 1+ w 1+ σ + jω z = = < 1 1 w 1 σ j ω da cui ( 1+ σ ) ( 1 σ ) ω 2 + ω < ( 1 σ ) + ω < ( 1 σ ) + ω + σ < 0 In modo analogo, è possibile mostrare che i punti sul cerchio unitario vengono mappati sull asse immaginario e che i punti esterni al cerchio unitario vengono mappati nel semipiano destro del piano di Gauss. CD Criterio di Routh Per testare la stabilità di una funzione di trasferimento G(z): Si considera l equazione caratteristica del sistema n n P( z) = z + a1z + L+ + an 1z + a 1 = Si effettua la trasformazione bilineare per mappare il piano z nel piano w n 0 1+ w 1 w n 1+ w + a1 1 w n 1 + L+ + a n 1 1+ w + a 1 w n = 0 da cui si ottiene una nuova equazione polinomiale in w n n Q( w) = q0w + q1w + L+ + qn 1w + q 1 = n 0 CD Pag. 27
28 Criterio di Routh in virtù delle proprietà della trasformazione bilineare, radici di Q(w) a parte reale positiva, nulla, negativa corrispondono rispettivamente a radici di P(z) a modulo maggiore, uguale, minore di 1. Applicando il criterio di Routh, si determina la posizione delle radici di Q(w) e, di conseguenza, la stabilità di G(z). CD Esempio Sia dato un sistema discreto rappresentato da: z + 1 G( z) = 3 2 z + 2z + z + 1 Applicando la trasformazione bilineare all equazione caratteristica, si ottiene 1+ w Q( w) = 1 w 3 1+ w w da cui 3 2 Q( w) = w + 3w + w w w CD Pag. 28
29 Esempio Applicando il criterio di Routh, si ottiene: /3 0 5 da cui si conclude che, essendo presente una sola variazione di segno in prima colonna, il sistema ha un polo instabile. CD Sistemi a tempo discreti Sono definiti in un insieme discreto dei tempi e possono essere rappresentati da un equazione alle differenze La trasformata Z è l analogo discreto della trasformata di Laplace e consente di definire e il concetto di funzione di trasferimento per i sistemi discreti. Le regole di interconnessione per i sistemi discreti sono le stesse che valgono per i sistemi continui La stabilità di un sistema discreto è legata alla molteplicità e alla posizione dei poli della sua funzione di trasferimento rispetto al cerchio unitario. CD Pag. 29
30 CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel cristian.secchi@unimore.it mettere dopo il teorema del ritardo: Il termine z -k è interpretabile come un ritardo z - k! ritardo di t = kt Dire quando si parla del metodo computazionale che è quella la ragione per cui le espressioni razionali fratte vengono espresse in termini di z -1 Controlli Digitali CD Pag. 30
31 Soluzione delle equazioni alle differenze Trovare la soluzione delle equazioni alle differenze è semplice. Basta conoscere le condizioni iniziali. Si consideri ad esempio: Condizioni iniziali: CD Equazione caratteristica L equazione caratteristica (associata all equazione) è data da L equazione alle differenze è instabile. Infatti la soluzione è divergente Ingegneria e Tecnologie dei Sistemi di Controllo CD Pag. 31
32 Soluzione delle equazioni alle differenze Nel caso generale, si ipotizza che la sequenza soluzione sia nella forma: Sostituendo la soluzione candidata nell equazione si ottiene: Dividendo per cz k si ottiene Poiché l equazione è lineare, si ha che la combinazione lineare di due soluzioni è ancora una soluzione. Quindi è ancora una soluzione Ingegneria e Tecnologie dei Sistemi di Controllo CD Soluzione delle equazioni alle differenze Le costanti c 1 e c 2 si determinano imponendo specifiche condizioni iniziali. da cui Ingegneria e Tecnologie dei Sistemi di Controllo CD Pag. 32
33 Soluzione delle equazioni alle differenze L equazione che si ottiene dopo la sostituzione u k =z k è detta equazione caratteristica dell equazione alle differenze. Se una delle radici dell equazione caratteristica ha modulo maggiore di 1, allora la corrispondente equazione alle differenze è instabile (cioè la sua soluzione divergerà al crescere del tempo per qualsiasi condizione iniziale finita). Se tutte le radici dell equazione caratteristica hanno modulo minore di 1, allora la corrispondente equazione alle differenze è stabile (cioè la sua soluzione convergerà a 0 al crescere del tempo per qualsiasi condizione iniziale finita). stabile 1 instabile Ingegneria e Tecnologie dei Sistemi di Controllo CD La Z-trasformata Funzioni elementari Funzione esponenziale. Sia data la funzione: a costante reale o complessa Poichè x(kt) = e -akt, k = 0, 1, 2,, si ha Convergente per z > e -Re(a)T Ingegneria e Tecnologie dei Sistemi di Controllo CD Pag. 33
34 La Z-trasformata Funzioni elementari Funzione sinusoidale. Sia data la funzione: Dalle formule di Eulero: Convergente per z > 1 Ingegneria e Tecnologie dei Sistemi di Controllo CD La Z-trasformata Funzioni elementari Funzione cosinusoidale. Sia data la funzione: Analogamente a prima, con le formule di Eulero Convergente per z > 1 Ingegneria e Tecnologie dei Sistemi di Controllo CD Pag. 34
Cristian Secchi Pag. 1
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL:
SISTEMI A TEMPO DISCRETO
 CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel. 0522 522235 e-mail: cristian.secchi@unimore.it http://www.dismi.unimo.it/members/csecchi Richiami di Controlli
CONTROLLI DIGITALI Laurea Magistrale in Ingegneria Meccatronica SISTEMI A TEMPO DISCRETO Ing. Tel. 0522 522235 e-mail: cristian.secchi@unimore.it http://www.dismi.unimo.it/members/csecchi Richiami di Controlli
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 2009-2010 p. 1/45 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma1.it Lucidi tratti dal libro C. Bonivento,
Sistemi Digitali di Controllo A.A. 2009-2010 p. 1/45 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma1.it Lucidi tratti dal libro C. Bonivento,
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Cristian Secchi Pag. 1
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI L DEI SISTEMI DISCRETI Ing. Cristian Secchi Tel. 0522 522235 e-mail:
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI L DEI SISTEMI DISCRETI Ing. Cristian Secchi Tel. 0522 522235 e-mail:
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
Trasformate di Laplace
 TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
Matematica generale CTF
 Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
ESERCITAZIONE (7-11-13) Ing. Stefano Botelli
 Ing. Stefano Botelli") FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Segnali e Sistemi. Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici. Gianni Borghesan e Giovanni Marro
 Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Fondamenti di Automatica. Unità 2 Calcolo del movimento di sistemi dinamici LTI
 Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Esercizi svolti. 1. Si consideri la funzione f(x) = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di
 = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di") Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
4 3 4 = 4 x 10 2 + 3 x 10 1 + 4 x 10 0 aaa 10 2 10 1 10 0
 Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
analisi di sistemi retroazionati (2)
") : analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano lovera@elet.polimi.it Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
: analisi di sistemi retroazionati (2) Marco Lovera Dipartimento di Elettronica e Informazione Politecnico di Milano lovera@elet.polimi.it Indice Piccolo guadagno Stabilita ingresso-uscita Guadagno L 2
Equazioni alle differenze finite (cenni).
.") AL 011. Equazioni alle differenze finite (cenni). Sia a n } n IN una successione di numeri reali. (Qui usiamo la convenzione IN = 0, 1,,...}). Diremo che è una successione ricorsiva o definita per ricorrenza
AL 011. Equazioni alle differenze finite (cenni). Sia a n } n IN una successione di numeri reali. (Qui usiamo la convenzione IN = 0, 1,,...}). Diremo che è una successione ricorsiva o definita per ricorrenza
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI
 APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
APPUNTI DI MATEMATICA LE FRAZIONI ALGEBRICHE ALESSANDRO BOCCONI Indice 1 Le frazioni algebriche 1.1 Il minimo comune multiplo e il Massimo Comun Divisore fra polinomi........ 1. Le frazioni algebriche....................................
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
SERIE NUMERICHE. prof. Antonio Greco 6-11-2013
 SERIE NUMERICHE prof. Antonio Greco 6--203 Indice Motivazioni........... 3 Definizione........... 3 Errore tipico........... 3 Un osservazione utile...... 3 Condizione necessaria...... 4 Serie armonica.........
SERIE NUMERICHE prof. Antonio Greco 6--203 Indice Motivazioni........... 3 Definizione........... 3 Errore tipico........... 3 Un osservazione utile...... 3 Condizione necessaria...... 4 Serie armonica.........
Capitolo 1 ANALISI COMPLESSA
 Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Le equazioni. Diapositive riassemblate e rielaborate da prof. Antonio Manca da materiali offerti dalla rete.
 Le equazioni Diapositive riassemblate e rielaborate da prof. Antonio Manca da materiali offerti dalla rete. Definizione e caratteristiche Chiamiamo equazione l uguaglianza tra due espressioni algebriche,
Le equazioni Diapositive riassemblate e rielaborate da prof. Antonio Manca da materiali offerti dalla rete. Definizione e caratteristiche Chiamiamo equazione l uguaglianza tra due espressioni algebriche,
CONCETTO DI LIMITE DI UNA FUNZIONE REALE
 CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
Sistemi LSTD: rappresentazione esplicita
 Trasformata Zeta Outline Sistemi LSTD: rappresentazione esplicita x(k+1) = Ax(k)+Bu(k), x R n, u R m, k Z y(k) = Cx(k)+Du(k), y R p x R n : vettore delle variabili di stato; u R m : vettore dei segnali
Trasformata Zeta Outline Sistemi LSTD: rappresentazione esplicita x(k+1) = Ax(k)+Bu(k), x R n, u R m, k Z y(k) = Cx(k)+Du(k), y R p x R n : vettore delle variabili di stato; u R m : vettore dei segnali
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Politecnico di Milano. Facoltà di Ingegneria Industriale. Corso di Analisi e Geometria 2. Sezione D-G. (Docente: Federico Lastaria).
.") Politecnico di Milano. Facoltà di Ingegneria Industriale. Corso di Analisi e Geometria 2. Sezione D-G. (Docente: Federico Lastaria). Aprile 20 Indice Serie numeriche. Serie convergenti, divergenti, indeterminate.....................
Politecnico di Milano. Facoltà di Ingegneria Industriale. Corso di Analisi e Geometria 2. Sezione D-G. (Docente: Federico Lastaria). Aprile 20 Indice Serie numeriche. Serie convergenti, divergenti, indeterminate.....................
6. Trasformate e Funzioni di Trasferimento
 6. Trasformate e Funzioni di Trasferimento 6.3 Richiami sulla Trasformata di Laplace Definizione La trasformata di Laplace di f(t) è la funzione di variabile complessa s C, (s = σ + jω), F (s) = e st f(t)dt
6. Trasformate e Funzioni di Trasferimento 6.3 Richiami sulla Trasformata di Laplace Definizione La trasformata di Laplace di f(t) è la funzione di variabile complessa s C, (s = σ + jω), F (s) = e st f(t)dt
Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza p. 2
 Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza Valentino Liberali Dipartimento di Tecnologie dell Informazione Università di Milano, 26013
Elettronica II Proprietà e applicazioni della trasformata di Fourier; impedenza complessa; risposta in frequenza Valentino Liberali Dipartimento di Tecnologie dell Informazione Università di Milano, 26013
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Matematica generale CTF
 Equazioni differenziali 9 dicembre 2015 Si chiamano equazioni differenziali quelle equazioni le cui incognite non sono variabili reali ma funzioni di una o più variabili. Le equazioni differenziali possono
Equazioni differenziali 9 dicembre 2015 Si chiamano equazioni differenziali quelle equazioni le cui incognite non sono variabili reali ma funzioni di una o più variabili. Le equazioni differenziali possono
Esercizi svolti sui numeri complessi
 Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
Francesco Daddi - ottobre 009 Esercizio 1 Risolvere l equazione z 1 + i = 1. Soluzione. Moltiplichiamo entrambi i membri per 1 + i in definitiva la soluzione è z 1 + i 1 + i = 1 1 + i z = 1 1 i. : z =
Le funzioni continue. A. Pisani Liceo Classico Dante Alighieri A.S. 2002-03. A. Pisani, appunti di Matematica 1
 Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
Le funzioni continue A. Pisani Liceo Classico Dante Alighieri A.S. -3 A. Pisani, appunti di Matematica 1 Nota bene Questi appunti sono da intendere come guida allo studio e come riassunto di quanto illustrato
CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI
 CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI Abbiamo studiato successioni e serie numeriche, ora vogliamo studiare successioni e serie di funzioni. Dato un insieme A R, chiamiamo successione di funzioni
CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI Abbiamo studiato successioni e serie numeriche, ora vogliamo studiare successioni e serie di funzioni. Dato un insieme A R, chiamiamo successione di funzioni
Derivate Limiti e funzioni continue
 Derivate Limiti e funzioni continue Se il valore di una funzione f() si avvicina al valore l quando si avvicina ad 0 diciamo che f() ha come ite l per tendente ad 0. Noi per rappresentare questo fatto
Derivate Limiti e funzioni continue Se il valore di una funzione f() si avvicina al valore l quando si avvicina ad 0 diciamo che f() ha come ite l per tendente ad 0. Noi per rappresentare questo fatto
Serie numeriche e serie di potenze
 Serie numeriche e serie di potenze Sommare un numero finito di numeri reali è senza dubbio un operazione che non può riservare molte sorprese Cosa succede però se ne sommiamo un numero infinito? Prima
Serie numeriche e serie di potenze Sommare un numero finito di numeri reali è senza dubbio un operazione che non può riservare molte sorprese Cosa succede però se ne sommiamo un numero infinito? Prima
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Lezione 5. Schemi a blocchi
 Lezione 5 Schemi a blocchi Elementi costitutivi di uno schema a blocchi Gli schemi a blocchi costituiscono un formalismo per rappresentare graficamente le interazioni tra sistemi dinamici. Vediamone gli
Lezione 5 Schemi a blocchi Elementi costitutivi di uno schema a blocchi Gli schemi a blocchi costituiscono un formalismo per rappresentare graficamente le interazioni tra sistemi dinamici. Vediamone gli
Politecnico di Milano. Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Prima prova intermedia 28 Novembre 2014 SOLUZIONE
 a.a.2014-15 Prof. Silvia Strada Prima prova intermedia 28 Novembre 2014 SOLUZIONE") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.014-15 Prof. Silvia Strada Prima prova intermedia 8 Novembre 014 SOLUZIONE ESERCIZIO 1 punti: 8 su 3 Si consideri il sistema dinamico
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.014-15 Prof. Silvia Strada Prima prova intermedia 8 Novembre 014 SOLUZIONE ESERCIZIO 1 punti: 8 su 3 Si consideri il sistema dinamico
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
risulta (x) = 1 se x < 0.
 = 1 se x < 0.") Questo file si pone come obiettivo quello di mostrarvi come lo studio di una funzione reale di una variabile reale, nella cui espressione compare un qualche valore assoluto, possa essere svolto senza necessariamente
Questo file si pone come obiettivo quello di mostrarvi come lo studio di una funzione reale di una variabile reale, nella cui espressione compare un qualche valore assoluto, possa essere svolto senza necessariamente
u 1 u k che rappresenta formalmente la somma degli infiniti numeri (14.1), ordinati al crescere del loro indice. I numeri u k
, ordinati al crescere del loro indice. I numeri u k") Capitolo 4 Serie numeriche 4. Serie convergenti, divergenti, indeterminate Data una successione di numeri reali si chiama serie ad essa relativa il simbolo u +... + u +... u, u 2,..., u,..., (4.) oppure
Capitolo 4 Serie numeriche 4. Serie convergenti, divergenti, indeterminate Data una successione di numeri reali si chiama serie ad essa relativa il simbolo u +... + u +... u, u 2,..., u,..., (4.) oppure
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Esempi di funzione. Scheda Tre
 Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
Scheda Tre Funzioni Consideriamo una legge f che associa ad un elemento di un insieme X al più un elemento di un insieme Y; diciamo che f è una funzione, X è l insieme di partenza e X l insieme di arrivo.
STUDIO DEL SEGNO DI UNA FUNZIONE
 STUDIO DEL SEGNO DI UNA FUNZIONE Quando si studia una funzione! " #$%&' (funzione reale di variabile reale) è fondamentale conoscere il segno, in altre parole sapere per quali valori di &( #$%&'$è positiva,
STUDIO DEL SEGNO DI UNA FUNZIONE Quando si studia una funzione! " #$%&' (funzione reale di variabile reale) è fondamentale conoscere il segno, in altre parole sapere per quali valori di &( #$%&'$è positiva,
Funzioni di trasferimento. Lezione 14 2
 Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Analisi Mat. 1 - Ing. Inform. - Soluzioni del compito del 23-3-06
 Analisi Mat. - Ing. Inform. - Soluzioni del compito del 3-3-6 Sia p il polinomio di quarto grado definito da pz = z 4. Sia S il settore circolare formato dai numeri complessi che hanno modulo minore o
Analisi Mat. - Ing. Inform. - Soluzioni del compito del 3-3-6 Sia p il polinomio di quarto grado definito da pz = z 4. Sia S il settore circolare formato dai numeri complessi che hanno modulo minore o
( x) ( x) 0. Equazioni irrazionali
 ( x) 0. Equazioni irrazionali") Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Equazioni irrazionali Definizione: si definisce equazione irrazionale un equazione in cui compaiono uno o più radicali contenenti l incognita. Esempio 7 Ricordiamo quanto visto sulle condizioni di esistenza
Fondamenti di Automatica
 Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
Fondamenti di Automatica Analisi dei sistemi dinamici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Analisi dei
I NUMERI DECIMALI. che cosa sono, come si rappresentano
 I NUMERI DECIMALI che cosa sono, come si rappresentano NUMERI NATURALI per contare bastano i numeri naturali N i numeri naturali cominciano con il numero uno e vanno avanti con la regola del +1 fino all
I NUMERI DECIMALI che cosa sono, come si rappresentano NUMERI NATURALI per contare bastano i numeri naturali N i numeri naturali cominciano con il numero uno e vanno avanti con la regola del +1 fino all
Istituto d Istruzione Secondaria Superiore M.BARTOLO. A cura del Prof S. Giannitto
 Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Istituto d Istruzione Secondaria Superiore M.BATOLO PACHINO (S) APPUNTI DI SISTEMI AUTOMATICI 3 ANNO MODELLIZZAZIONE A cura del Prof S. Giannitto MODELLI MATEMATICI di SISTEMI ELEMENTAI LINEAI, L, C ivediamo
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
NUMERI COMPLESSI. Esercizi svolti., e) i 34, f) i 7. 10 i
 i 34, f) i 7. 10 i") NUMERI COMPLESSI Esercizi svolti 1. Calcolare le seguenti potenze di i: a) i, b) i, c) i 4, d) 1 i, e) i 4, f) i 7. Semplificare le seguenti espressioni: a) ( i) i(1 ( 1 i), b) ( + i)( i) 5 + 1 ) 10 i,
NUMERI COMPLESSI Esercizi svolti 1. Calcolare le seguenti potenze di i: a) i, b) i, c) i 4, d) 1 i, e) i 4, f) i 7. Semplificare le seguenti espressioni: a) ( i) i(1 ( 1 i), b) ( + i)( i) 5 + 1 ) 10 i,
Corrispondenze e funzioni
 Corrispondenze e funzioni L attività fondamentale della mente umana consiste nello stabilire corrispondenze e relazioni tra oggetti; è anche per questo motivo che il concetto di corrispondenza è uno dei
Corrispondenze e funzioni L attività fondamentale della mente umana consiste nello stabilire corrispondenze e relazioni tra oggetti; è anche per questo motivo che il concetto di corrispondenza è uno dei
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
Prova scritta di Controlli Automatici
 Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA 2011 2012 10 Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare
Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA 2011 2012 10 Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare
Funzione reale di variabile reale
 Funzione reale di variabile reale Siano A e B due sottoinsiemi non vuoti di. Si chiama funzione reale di variabile reale, di A in B, una qualsiasi legge che faccia corrispondere, a ogni elemento A x A
Funzione reale di variabile reale Siano A e B due sottoinsiemi non vuoti di. Si chiama funzione reale di variabile reale, di A in B, una qualsiasi legge che faccia corrispondere, a ogni elemento A x A
LE SUCCESSIONI 1. COS E UNA SUCCESSIONE
 LE SUCCESSIONI 1. COS E UNA SUCCESSIONE La sequenza costituisce un esempio di SUCCESSIONE. Ecco un altro esempio di successione: Una successione è dunque una sequenza infinita di numeri reali (ma potrebbe
LE SUCCESSIONI 1. COS E UNA SUCCESSIONE La sequenza costituisce un esempio di SUCCESSIONE. Ecco un altro esempio di successione: Una successione è dunque una sequenza infinita di numeri reali (ma potrebbe
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
Elettronica e Telecomunicazioni Classe Quinta. La trasformata di Laplace
 Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Anno 3. Funzioni: dominio, codominio e campo di esistenza
 Anno 3 Funzioni: dominio, codominio e campo di esistenza 1 Introduzione In questa lezione parleremo delle funzioni. Ne daremo una definizione e impareremo a studiarne il dominio in relazione alle diverse
Anno 3 Funzioni: dominio, codominio e campo di esistenza 1 Introduzione In questa lezione parleremo delle funzioni. Ne daremo una definizione e impareremo a studiarne il dominio in relazione alle diverse
Relazioni statistiche: regressione e correlazione
 Relazioni statistiche: regressione e correlazione È detto studio della connessione lo studio si occupa della ricerca di relazioni fra due variabili statistiche o fra una mutabile e una variabile statistica
Relazioni statistiche: regressione e correlazione È detto studio della connessione lo studio si occupa della ricerca di relazioni fra due variabili statistiche o fra una mutabile e una variabile statistica
1. PRIME PROPRIETÀ 2
 RELAZIONI 1. Prime proprietà Il significato comune del concetto di relazione è facilmente intuibile: due elementi sono in relazione se c è un legame tra loro descritto da una certa proprietà; ad esempio,
RELAZIONI 1. Prime proprietà Il significato comune del concetto di relazione è facilmente intuibile: due elementi sono in relazione se c è un legame tra loro descritto da una certa proprietà; ad esempio,
L espressione torna invece sempre vera (quindi la soluzione originale) se cambiamo contemporaneamente il verso: 1 < 0.
 se cambiamo contemporaneamente il verso: 1 < 0.") EQUAZIONI E DISEQUAZIONI Le uguaglianze fra espressioni numeriche si chiamano equazioni. Cercare le soluzioni dell equazione vuol dire cercare quelle combinazioni delle lettere che vi compaiono che la
EQUAZIONI E DISEQUAZIONI Le uguaglianze fra espressioni numeriche si chiamano equazioni. Cercare le soluzioni dell equazione vuol dire cercare quelle combinazioni delle lettere che vi compaiono che la
NOME:... MATRICOLA:... Scienza dei Media e della Comunicazione, A.A. 2007/2008 Analisi Matematica 1, Esame scritto del 08.02.2008. x 1.
 NOME:... MATRICOLA:.... Scienza dei Media e della Comunicazione, A.A. 007/008 Analisi Matematica, Esame scritto del 08.0.008 Indicare per quali R vale la seguente diseguaglianza : + >. Se y - - è il grafico
NOME:... MATRICOLA:.... Scienza dei Media e della Comunicazione, A.A. 007/008 Analisi Matematica, Esame scritto del 08.0.008 Indicare per quali R vale la seguente diseguaglianza : + >. Se y - - è il grafico
Corso di Analisi Matematica Serie numeriche
 Corso di Analisi Matematica Serie numeriche Laurea in Informatica e Comunicazione Digitale A.A. 2013/2014 Università di Bari ICD (Bari) Analisi Matematica 1 / 25 1 Definizione e primi esempi 2 Serie a
Corso di Analisi Matematica Serie numeriche Laurea in Informatica e Comunicazione Digitale A.A. 2013/2014 Università di Bari ICD (Bari) Analisi Matematica 1 / 25 1 Definizione e primi esempi 2 Serie a
Logica Numerica Approfondimento 1. Minimo Comune Multiplo e Massimo Comun Divisore. Il concetto di multiplo e di divisore. Il Minimo Comune Multiplo
 Logica Numerica Approfondimento E. Barbuto Minimo Comune Multiplo e Massimo Comun Divisore Il concetto di multiplo e di divisore Considerato un numero intero n, se esso viene moltiplicato per un numero
Logica Numerica Approfondimento E. Barbuto Minimo Comune Multiplo e Massimo Comun Divisore Il concetto di multiplo e di divisore Considerato un numero intero n, se esso viene moltiplicato per un numero
Rappresentazione nello spazio degli stati
 Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
FUNZIONI REALI DI VARIABILE REALE e CONTINUITA Roberto Argiolas
 FUNZIONI REALI DI VARIABILE REALE e CONTINUITA Roberto Argiolas.8.6.. - -.5.5 -. In questa dispensa ricordiamo la classificazione delle funzioni elementari e il dominio di esistenza delle stesse. Inoltre
FUNZIONI REALI DI VARIABILE REALE e CONTINUITA Roberto Argiolas.8.6.. - -.5.5 -. In questa dispensa ricordiamo la classificazione delle funzioni elementari e il dominio di esistenza delle stesse. Inoltre
1 Serie di Taylor di una funzione
 Analisi Matematica 2 CORSO DI STUDI IN SMID CORSO DI ANALISI MATEMATICA 2 CAPITOLO 7 SERIE E POLINOMI DI TAYLOR Serie di Taylor di una funzione. Definizione di serie di Taylor Sia f(x) una funzione definita
Analisi Matematica 2 CORSO DI STUDI IN SMID CORSO DI ANALISI MATEMATICA 2 CAPITOLO 7 SERIE E POLINOMI DI TAYLOR Serie di Taylor di una funzione. Definizione di serie di Taylor Sia f(x) una funzione definita
FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI
 FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI Guida alla soluzione degli esercizi d esame Dott. Ing. Marcello Bonfè Esercizi sulla scomposizione di modelli nello spazio degli stati: Gli esercizi nei
FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI Guida alla soluzione degli esercizi d esame Dott. Ing. Marcello Bonfè Esercizi sulla scomposizione di modelli nello spazio degli stati: Gli esercizi nei
Il simbolo. è è = = = In simboli: Sia un numero naturale diverso da zero, il radicale. Il radicale. esiste. esiste 0 Il radicale
 Radicali 1. Radice n-esima Terminologia Il simbolo è detto radicale. Il numero è detto radicando. Il numero è detto indice del radicale. Il numero è detto coefficiente del radicale. Definizione Sia un
Radicali 1. Radice n-esima Terminologia Il simbolo è detto radicale. Il numero è detto radicando. Il numero è detto indice del radicale. Il numero è detto coefficiente del radicale. Definizione Sia un
Elementi di topologia della retta
 Elementi di topologia della retta nome insieme definizione l insieme è un concetto primitivo che si accetta come intuitivamente noto secondo George Cantor, il padre della teoria degli insiemi: Per insieme
Elementi di topologia della retta nome insieme definizione l insieme è un concetto primitivo che si accetta come intuitivamente noto secondo George Cantor, il padre della teoria degli insiemi: Per insieme
Funzioni inverse Simmetrie rispetto alla bisettrice dei quadranti dispari. Consideriamo la trasformazione descritta dalle equazioni : = y
 Funzioni inverse Simmetrie rispetto alla bisettrice dei quadranti dispari. Consideriamo la trasformazione descritta dalle equazioni : ' = y y' = Consideriamo il punto P(,5) se eseguiamo tra trasformazione
Funzioni inverse Simmetrie rispetto alla bisettrice dei quadranti dispari. Consideriamo la trasformazione descritta dalle equazioni : ' = y y' = Consideriamo il punto P(,5) se eseguiamo tra trasformazione
Definisci il Campo di Esistenza ( Dominio) di una funzione reale di variabile reale e, quindi, determinalo per la funzione:
 di una funzione reale di variabile reale e, quindi, determinalo per la funzione:") Verso l'esame di Stato Definisci il Campo di Esistenza ( Dominio) di una funzione reale di variabile reale e, quindi, determinalo per la funzione: y ln 5 6 7 8 9 0 Rappresenta il campo di esistenza determinato
Verso l'esame di Stato Definisci il Campo di Esistenza ( Dominio) di una funzione reale di variabile reale e, quindi, determinalo per la funzione: y ln 5 6 7 8 9 0 Rappresenta il campo di esistenza determinato
31/10/2012. Lo studio delle funzioni permette di interpretare la variazione di due grandezze, l una rispetto l altra, quando
 FUNZIONI MATEMATICHE Introduzione Lo studio delle funzioni permette di interpretare la variazione di due grandezze, l una rispetto l altra, quando tra le due esiste un legame di tipo matematico. La teoria
FUNZIONI MATEMATICHE Introduzione Lo studio delle funzioni permette di interpretare la variazione di due grandezze, l una rispetto l altra, quando tra le due esiste un legame di tipo matematico. La teoria
Parte 2. Determinante e matrice inversa
 Parte. Determinante e matrice inversa A. Savo Appunti del Corso di Geometria 013-14 Indice delle sezioni 1 Determinante di una matrice, 1 Teorema di Cramer (caso particolare), 3 3 Determinante di una matrice
Parte. Determinante e matrice inversa A. Savo Appunti del Corso di Geometria 013-14 Indice delle sezioni 1 Determinante di una matrice, 1 Teorema di Cramer (caso particolare), 3 3 Determinante di una matrice
Matematica e Statistica
 Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Strumenti matematici per l analisi dei sistemi tempo discreto LT-Cap. 2
 Controllo Digitale a.a. 2007-2008 Strumenti matematici per l analisi dei sistemi tempo discreto LT-Cap. 2 Ing. Federica Pascucci Equazioni alle differenze (ricorsive) f legame tra le sequenze {e k } ed
Controllo Digitale a.a. 2007-2008 Strumenti matematici per l analisi dei sistemi tempo discreto LT-Cap. 2 Ing. Federica Pascucci Equazioni alle differenze (ricorsive) f legame tra le sequenze {e k } ed
Grafico qualitativo di una funzione reale di variabile reale
 Grafico qualitativo di una funzione reale di variabile reale Mauro Saita 1 Per commenti o segnalazioni di errori scrivere, per favore, a: maurosaita@tiscalinet.it Dicembre 2014 Indice 1 Qualè il grafico
Grafico qualitativo di una funzione reale di variabile reale Mauro Saita 1 Per commenti o segnalazioni di errori scrivere, per favore, a: maurosaita@tiscalinet.it Dicembre 2014 Indice 1 Qualè il grafico
Matematica 1 - Corso di Laurea in Ingegneria Meccanica
 Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
LEZIONE 7. Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.
 e ha derivata prima in 3 che vale 0? x 3 3 + x2. 2, x3 +2x +3.") 7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
7 LEZIONE 7 Esercizio 7.1. Quale delle seguenti funzioni è decrescente in ( 3, 0) e ha derivata prima in 3 che vale 0? x 3 3 + x2 2 6x, x3 +2x 2 6x, 3x + x2 2, x3 +2x +3. Le derivate sono rispettivamente,
Dimensione di uno Spazio vettoriale
 Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Capitolo 4 Dimensione di uno Spazio vettoriale 4.1 Introduzione Dedichiamo questo capitolo ad un concetto fondamentale in algebra lineare: la dimensione di uno spazio vettoriale. Daremo una definizione
Anno 5 4. Funzioni reali: il dominio
 Anno 5 4 Funzioni reali: il dominio 1 Introduzione In questa lezione impareremo a definire cos è una funzione reale di variabile reale e a ricercarne il dominio. Al termine di questa lezione sarai in grado
Anno 5 4 Funzioni reali: il dominio 1 Introduzione In questa lezione impareremo a definire cos è una funzione reale di variabile reale e a ricercarne il dominio. Al termine di questa lezione sarai in grado
0. Piano cartesiano 1
 0. Piano cartesiano Per piano cartesiano si intende un piano dotato di due assi (che per ragioni pratiche possiamo scegliere ortogonali). Il punto in comune ai due assi è detto origine, e funziona da origine
0. Piano cartesiano Per piano cartesiano si intende un piano dotato di due assi (che per ragioni pratiche possiamo scegliere ortogonali). Il punto in comune ai due assi è detto origine, e funziona da origine
Fondamenti di Automatica
 Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. Analisi
Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. Analisi
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
G3. Asintoti e continuità
 G3 Asintoti e continuità Un asintoto è una retta a cui la funzione si avvicina sempre di più senza mai toccarla Non è la definizione formale, ma sicuramente serve per capire il concetto di asintoto Nei
G3 Asintoti e continuità Un asintoto è una retta a cui la funzione si avvicina sempre di più senza mai toccarla Non è la definizione formale, ma sicuramente serve per capire il concetto di asintoto Nei
Numeri Complessi R 2. P = (x P,y P ) x P. z = (x,y) y P (0,0)
 x P. z = (x,y) y P (0,0)") Numeri Complessi Un numero complesso z può essere definito come una coppia ordinata (x,y) di numeri reali x e y. L insieme dei numeri complessi è denotato con C e può essere identificato con il piano cartesiano
Numeri Complessi Un numero complesso z può essere definito come una coppia ordinata (x,y) di numeri reali x e y. L insieme dei numeri complessi è denotato con C e può essere identificato con il piano cartesiano
SISTEMI DI NUMERAZIONE E CODICI
 SISTEMI DI NUMERAZIONE E CODICI Il Sistema di Numerazione Decimale Il sistema decimale o sistema di numerazione a base dieci usa dieci cifre, dette cifre decimali, da O a 9. Il sistema decimale è un sistema
SISTEMI DI NUMERAZIONE E CODICI Il Sistema di Numerazione Decimale Il sistema decimale o sistema di numerazione a base dieci usa dieci cifre, dette cifre decimali, da O a 9. Il sistema decimale è un sistema