Filtri attivi 1 V R 1. Dell op.amp. V o. V i. H db
|
|
|
- Ruggero Simoni
- 5 anni fa
- Visualizzazioni
Transcript
1 Filtri attivi
2 Filtri attivi Un filtro attivo del primo ordine (paa BASSO o paa ALTO) può eere realizzato collegando, all'ingreo di un amplificatore NON invertente con operazionale, una cella filtrante paiva (paa BASSO o paa ALTO) a reitenza e capacità Si ceglie l'amplificatore NON invertente (invece di quello invertente) perché preenta un'impedenza di ingreo più elevata e quindi carica meno il filtro paivo, non alterandone, fra l'altro, la frequenza di taglio. V i C - + U Eempio: filtro paa bao attivo del I ordine OUT V o V o C H= V i C C Dell op.amp. C C C H db K= (+ / )>=
3 Filtri attivi Eempio: filtro paa bao attivo del econdo ordine OUT V i C + U OUT C + U V o Vengono poti in cacata due tadi del primo ordine H= V o 4 V C i C C 3
4 H db Filtri attivi N =/C= polo (polo doppio) La pendenza nella banda ocura è di -4 db/decade. ω 4
5 Filtri attivi Mettendo in cacata N filtri del primo ordine con lo teo polo i ottiene un filtro di ordine N con pendenza piu ripida nella banda ocura (N*dB/decade) che meglio i avvicina al filtro ideale, ma che nella banda paante è meno piatto e decrece fino a -3N db. Eempio N=4 ; 4 poli reali coincidenti Pendenza -8 db/decade in banda ocura Attenuazione a ω o (ω polo ) pari a - db H db ω 5
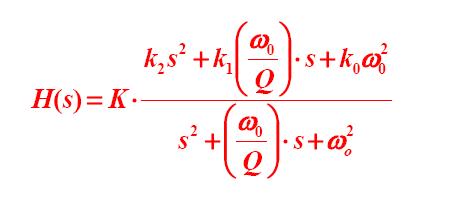
6 Filtri attivi Soluzione che conente di avere una pendenza alta in banda ocura e una variazione di guadagno in banda paante contenuta: Utilizzare configurazioni circuitali che generino una funzione di traferimento con poli complei e coniugati. Q H ( ) Fattore di merito N( ) Q N( ) Fattore di morzamento - quantifica l attitudine del filtro a morzare le ocillazioni nella ripota temporale ad un egnale a gradino Pulazione naturale o di rionanza 6
7 7
8 Data una funzione di traferimento H ( ) N( ) Q Filtri attivi N( ) I poli ono complei coniugati per ξ< (Q>.5) A econda del valore di ξ (o di Q) il diagramma vero i cota da quello aintotico di valori poitivi o negativi ξ -4dB/decade Per ξ=.77 (Q=.77) lo cotamento in e di -3 db ω ω 8
9 FILTI Filtri attivi I poli della funzione di traferimento i trovano riolvendo l equazione Si trova: p <ξ< (.5<Q< ) dicriminante negativo, poli complei e coniugati - - modulo p - j - - p ξ = (Q=.5) dicriminante nullo, poli reali coincidenti ξ > (Q<.5) dicriminante poitivo, poli reali ditinti ξ < poli con parte reale poitiva, itema intabile 9
10 appreentazione grafica nel piano di Gau I poli complei i trovano dipoti u un cerchio di raggio ω. parte reale -ξ ω = -ω co(θ) Im ξ = co(θ) Q= /( co(θ)) ω θ e
 che ci è tata")
11 = ripple (a) f c = f conv (conv=converione) permette di paare da a t = taglio fconv t Paa bao t Paa alto fconv Fornice i parametri che permettono di effettuare la celta della forma della ripota effettiva, oia l'approimazione della ripota (filtro BUTTEWOTH, CHEBICHEV o BESSEL) che ci è tata richieta)
12 FILTI Filtri attivi Mettendo in cacata moduli con funzione di traferimento con poli complei e coniugati e cegliendo opportunamente il coefficiente di morzamento ξ per ciacun modulo, i può, ad empio, ottenere una funzione di traferimento compleiva tale che alla pulazione ω il modulo i dicoti dal diagramma aintotico di 3 db. N.B. Mettendo in cacata funzioni di traferimento, la f.d.t. compleiva è il prodotto delle f.d.t., che epreo in db corriponde alla omma delle ingole f.d.t. epree in db. H H H H H H db db db
13 FILTI Filtri attivi Moduli del econdo ordine con poli complei e coniugati in cacata H H H=H *H ) ( ) ( ) ( ) ( N H N H ) ( ) ( ) ( N N H H H db db db H H H H H H 3
14 FILTI Filtri attivi H db H 5 db ξ= ξ= cotamento=5.339 db xi= cotamento=-.36 db xi=.3868 H db = H db + H db 5-3db t 4
15 Filtri attivi Dai grafici i vede come mettendo in cacata due f.d.t. con poli complei e coniugati, a parità di ω, e con ξ =.9 e ξ =.38, i ottiene una f.d.t. che alla ω ha uno cotamento dal diagramma aintotico di -3 db (uguale a quella di un filtro del primo ordine), ma nella banda attenuata una pendenza di -8 db/decade. Ciò è ottenuto combinando funzioni con ripote in frequenza con ovraelongazioni poitive che compenano quelle negative. Queto metodo i può generalizzare ponendo più moduli in cacata, ottenendo pendenze empre più ripide, con caratteritiche uguali in banda paante. 5
16 Configurazioni circuitali FILTI Filtri attivi ) Filtri a retroazione poitiva emplice (VCVS Sallen Key) ) Filtri a retroazione negativa multipla 6
17 I due tipi più comuni di filtri attivi utilizzano VCVS (Sallen e Key) (voltage-controlled voltage ource) un amplificatore non invertente e rete di retroazione emplice poitiva. Utilizza un amplificatore con guadagno K Multiple-feedback o retroazione negativa multipla un amplificatore invertente a guadagno molto elevato e rete di retroazione multipla B A Y4 Y Y4 - OUT Y Y5 + Y3 - Y3 Y Y5 Y + OUT VCVS Multiple-feedback 7
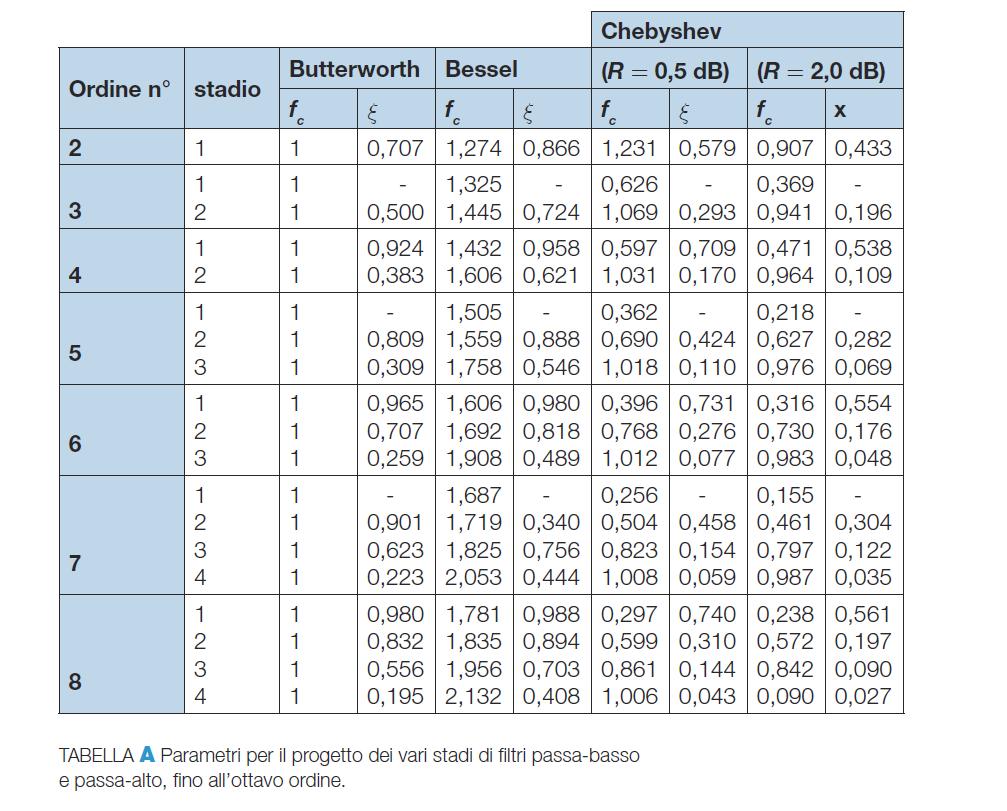
18 Ciacuna ammettenza Y i riferice ad un elemento ingolo, una reitenza oppure una capacità; cegliendo opportunamente tali elementi i può realizzare un itema del ordine la cui f.d.t. è eprea da una delle equazioni dei quadripoli del ordine. Nell'ipotei che l'amplificatore operazionale ia ideale, l'impedenza di ucita del filtro è nulla. Il carico non ha pertanto alcuna influenza ulla f.d.t. del filtro. È queto uno dei principali vantaggi dei filtri attivi ripetto a quelli paivi perché, nei itemi di ordine uperiore al econdo, i può progettare eparatamente ciacuno tadio (chiamato anche cella) del filtro. Per poter realizzare la f.d.t. del filtro è ufficiente conocere il valore dei parametri ω e Q per ciacuno tadio. I manuali fornicono opportune tabelle che mettono in corripondenza queti parametri con le caratteritiche della curva di ripota del filtro compleivo. Speo, dato che i valori normalizzati delle capacità dei condenatori ono in numero minore ripetto ai valori diponibili per le reitenze i fruttano i gradi di libertà in più per cegliere valori convenienti per le capacità. Inoltre, per emplificare il progetto, peo i cerca di utilizzare per i condenatori o per i reitori dei valori uguali 8
19 Configurazione VCVS o di Sallen e Key La configurazione generale ha la caratteritica di utilizzare un op-amp in configurazione non invertente I componenti del circuito ono in generale reitenze e condenatori rappreentati dalle loro Y (ammettenze); Elevata impedenza d'ingreo Baa impedenza d'ucita egolazione del guadagno tramite le due reitenze collegate all'ingreo invertente. Ideale per filtri con ripota alla Butterworth. Preenza di una retroazione poitiva e coneguenti vantaggi di natura pratica Forte dipendenza del Q del circuito dal guadagno coicché l'utilizzo della configurazione è limitato a bai valori di Q (<Q<) e di guadagno (al più ). Sconigliato per filtri paa-banda. B A Y Y4 - OUT Vo KYY 4 V Y ( Y Y Y Y ) Y [ Y Y ( - K) Y ] i K A B Y3 Y + Y5 9
20 Configurazione a retroazione multipla o Multiple FeedBack (MFB) E caratterizzato da due anelli di retroazione negativa; Il egnale entra dal moretto dell operazionale (configurazione invertente). I componenti del circuito ono in generale reitenze e condenatori rappreentati dalle loro Y (ammettenze); Baa impedenza d'ucita. Scara dipendenza del Q del circuito da guadagno coicché e poibile realizzare valori di Q ragionevolmente elevati (comunque Q < 5). Va bene per tutti i tipi di ripota (Butterworth, Beel, Chebyhev). Media impedenza d'ingreo. ichiede op-amp con elevato guadagno oia con comportamento molto proimo a quello ideale. Y4 Vo YY 3 - V Y Y Y ( Y V Y Y ) i Y 3 4 Y Y Y3 - + Y5 OUT
21 FILTI Filtri attivi primo ordine Filtri del primo ordine (pendenza +/- db per decade nella banda ocura) Nella configurazione VCVS ono cotituiti da un filtro paivo eguiti da uno tadio operazionale che funziona da buffer, rendendo la funzione di traferimento indipendente dal carico o dagli tadi ucceivi. Nella configurazione a reazione negativa multipla i mette un olo condenatore che determina nella f.d.t. un olo polo.
22 Paa bao (VCVS) FILTI Filtri attivi primo ordine V i C - + U OUT V o V i C - + U OUT V o V Vo o C V Vi C i C C K=+ / K= polo = o = t =/C polo = o = t =/C C C
23 FILTI Filtri attivi primo ordine Paa bao (reazione negativa multipla) Cf - f OUT V o f - V C i f f V i + U Vo - f f C f C f f K=- f / polo = o = t = / f C f 3
24 FILTI Filtri attivi primo ordine Paa alto (VCVS) - - OUT C OUT V i C + V o Vi + V o V o C Vi C C V V o i C C C K=+ / K= polo = o = t =/C ; polo = o = t =/C ; zero zero 4
25 FILTI Paa alto (eazione negativa multipla) Filtri attivi primo ordine C f V i - + U OUT V o V V o i Cf - C - f C K=- f / polo = o = t =/ C zero 5
26 Filtri paa banda La ripota in frequenza di un filtro paa-banda è del tipo Queto andamento può eere ottenuto. ealizzando un circuito con tale f. di t. la quale però non può eere caratterizzata da una ripota piatta u un ampio intervallo di frequenze. Utilizzando un filtro paa alto e un filtro paa bao in cacata. La f. di t. compleiva i ottiene moltiplicando la f. di t. dei due filtri. 6
27 FILTI Filtri attivi primo ordine Paa banda a banda larga, Q< (VCVS) Cacata di un filtro paa alto e uno paa bao; la frequenza di taglio del paa alto deve eere minore di quella del paa bao (di almeno una decade per avere un guadagno non troppo variabile nella banda paante) - - OUT OUT V i C + C + V o Vo C V C C i uno zero nell origine due poli ditinti 7
28 Paa banda FILTI H 3 H H = = log MATLAB SCIPT w=; %paa alto w=; %paa bao for i=: w(i)=i*.; H(i)=j*w(i)/(j*w(i)+w); H(i)=w/(j*w(i)+w); end; H3=H.*H; plot(log(w),ab(h)); hold on; plot(log(w),ab(h),'r'); plot(log(w),ab(h3),'g');grid H 3 H H = = log 8
29 FILTI Filtri attivi econdo ordine Sfruttando le configurazioni a reazione negativa multipla e VCVS, nella rete paiva ono preenti due condenatori che generano due poli; nel cao di filtri paa-bao e paa-alto la pendenza nella banda ocura è di -4 db/decade. L andamento nella banda paante dipende dai poli (reali coincidenti o ditinti o complei e coniugati. Dato che le configurazioni circuitali ono retroazionate, occorre verificare la tabilita (poli con parte reale negativa). 9
30 FILTI Filtri attivi econdo ordine Paa bao (reazione negativa multipla) 3 C - V i C + OUT V o V V o i - C C C C C 3 3 3
31 Paa bao (reazione negativa multipla). FILTI Filtri attivi econdo ordine Confrontando la f.d.t. con la formula generale di f.d.t. con due poli i ha; 3 ) AK o - K rappreenta il guadagno in continua, (frequenza zero), che i ottiene ponendo = (otituendo ai condenatori dei circuiti aperti). ) n o C C 3 n 3) o o n Q C 3 Mediante quete formule di progetto è poibile dimenionare il circuito, date le pecifiche. 3
32 FILTI Filtri attivi econdo ordine Eempio: Filtro paa-bao del econdo ordine in configurazione reazione negativa multipla. Specifiche: K = -, f =khz, H(f ) =-3dB. Per avere cotamento di -3dB alla frequenza f, Q=ξ=.77. Fio = = kw ; Dalla ) per il guadagno K trovo 3 = kw. Dalla 3) trovo C ; (ω =πf=68 krad/) Q C,36 nf C 68 n 3 Dalla ) trovo C ; C n C 3 8pF 3
33 FILTI Filtri attivi econdo ordine 33
34 FILTI Filtri attivi econdo ordine Paa bao (reazione poitiva emplice (VCVS)) - + OUT V i C V o C Funzione di traferimento V K o C n V 3 i - K K C K K 3 n - 3- K C C 34
35 FILTI Filtri attivi econdo ordine Paa bao (reazione poitiva emplice VCVS) Un poibile dimenionamento del circuito: ) data, i celgono i valori di e C ) i ceglie il valore di K(Q) e quindi il rapporto / ; i ha infatti Q 3- K - e quindi - 35
36 FILTI Filtri attivi econdo ordine Eempio: Filtro paa-bao del econdo ordine in configurazione reazione poitiva emplice (VCVS). Specifiche: ) f o =khz ) cotamento di -3dB per f=f Per la pecifica ) deve riultare Q=ξ=.77. Fio C=nF, ricavo per oddifare la ),59 K 3-9 fc 68 f C n Dalla condizione ) - -, 4.59 Fio =k e quindi =5.9k N.B. in queto cao il guadagno in continua del filtro determina la poizione dei poli e non è quindi fiabile. Se i deidera un certo guadagno occorre mettere in cacata uno tadio di amplificazione. Q 3- K - 36
37 FILTI Filtri attivi econdo ordine 37
38 Paa alto (reazione negativa multipla) FILTI Filtri attivi econdo ordine Lo chema i ottiene da quello del paa bao, invertendo la poizione dei reitori e condenatori nella rete di retroazione. C3 C C - V i + OUT V o V V o i - C C 3 C CC3 C C 3 CC3 38
39 Paa alto (reazione negativa multipla) Formule di progetto: FILTI Filtri attivi econdo ordine ) K - C C 3 K rappreenta il guadagno nella banda paante (frequenze maggiori della frequenza di taglio) per f -->. ) C C 3 3) C CC 3 C C3 Q 39
40 FILTI Filtri attivi econdo ordine Paa alto (reazione poitiva emplice (VCVS)) - C C + OUT V i V o V K K o V 3 i - K n 3- K C C C K 4
41 FILTI Filtri attivi econdo ordine Paa alto (reazione poitiva emplice (VCVS)) Formule di progetto: Si uano gli tei criteri uati per il paa bao VCVS. Dimenionamento del circuito: ) data, i celgono i valori di e C ) data la poizione dei poli, i ceglie il valore di K e quindi il rapporto / ; i ha infatti Q 3- K - e quindi - 4
42 FILTI Filtri attivi ordine uperiore Si ottengono mettendo in cacata filtri del primo e econdo ordine: la funzione di traferimento compleiva è il prodotto delle ingole f.d.t. (la omma nei diagrammi di Bode in cui il modulo del guadagno è epreo in db). Per ottenere nella banda paante la maima piattezza e in corripondenza della frequenza di taglio un cotamento di 3 db ripetto al diagramma aintotico, i ua l approimazione di Butterworth. I poli della f.d.t. compleiva devono avere un valore opportuno: devono eere dipoti, nel piano di Gau, u un cerchio di raggio ω e equiditanziati di un angolo pari a 8/n dove n e l ordine del filtro. 4
43 43
44 Si può dimotrare che e N è pari, il polinomio B N () è dato dal prodotto di N / polinomi di econdo grado del tipo +b+ con b> e N è dipari allora è preente anche il fattore + ealizzazione con approimazione di Butterworth 44 ) ( ) ( t N N t n N N n n B H B H Il polinomio B N () n N n B H t N B H n
45 . Si conideri la funzione di traferimento del filtro. Nel cao del filtro di Butterworth di ordine N, con frequenza di taglio t =, riulta H() = / B N ( / ). Si decompone B N come prodotto p () p () p m (), dove p i () è del tipo + oppure +b+, con b reale poitivo. 3. Si realizzano eparatamente i itemi S i che hanno /p i (/ ) come funzione di traferimento ( i m). 4. Si cotruice il itema S ottenuto ponendo in cacata i itemi S i, in modo che l ucita di S i ia l ingreo di S i+ La cotruzione è corretta poiché il itema compleivo S ha come funzione di traferimento H( / ) il prodotto delle funzioni di traferimento dei itemi S i B p p p p H N m m... ; b H H
46 + - OUT C C ) 46 Utilizzo per il ingolo blocco un filtro VCVS, paa bao del II ordine ;.765 K H K H
47 47 ; 3 3 ) (, K K K K K H - - W W W - - k ' - K '' k ' K - ' F C k K K K K.5.35.Ottengo., '' ' Fio,5,35,848 3,765 3 W k C.6 ; K K H
48 Collegando in cacata celle del ordine alla Butterworth, quete avranno diveri e opportuni coefficienti di morzamento. Celle di filtri del ordine alla Chebychev o alla Beel avranno diveri ia i fattori di morzamento ia ω o. f c è il fattore di converione f conv PB f f conv f t per ogni tadio PA f f f t conv per ogni tadio 48

49 Circuito di Antoniou: otituzione induttore In letteratura ono preenti molti modelli di filtri che baano il loro funzionamento ulla otituzione dell induttore nel claico circuito LC, con una rete C e amplificatori operazionali. Uno dei circuiti che garantice le migliori pretazioni è il circuito di Antoniou; il quale riulta poco enibile alle non idealità degli amplificatori operazionali. L C
50 Filtri a capacità commutate I principale vantaggi dei circuiti fin qui motrati ono otanzialmente dovuti all impoibilità che ei poano eere integrati in un unico circuito integrato monolitico e alla neceità di precie cotanti di tempo C per ripettare le pecifiche di progetto. Dobbiamo coniderare inoltre che i componenti in commercio aumono olo alcuni valori tandard e con ben determinate tolleranze. Una oluzione a queti problemi è data dai circuiti a capacità commutata. Ei i baano ul concetto per cui una capacità a cui è collegato un interrutore può comportari come una reitenza e la velocità di commutazione dell interruttore è ufficientemente alta. 5
51 Se la frequenza f c con cui viene azionato l interruttore è molto maggiore della frequenza del egnale di ingreo (ul moretto A), quindi durante il tempo di commutazione T c poo coniderare il egnale cotante, è poibile crivere: quantita di carica potata : frequenza di commutazione : I Qf C C(V A -V B )f C da ΔQ C(V f c A -V cui poiamo crivere B ) (V A -V B )/I eq / f c C T c / C eq C T c C C Il vantaggio principale è dovuto al fatto che la cotante di tempo dipende da un rapporto di capacità. In queto modo l incertezza ul valore della cotante di tempo è molto minore ripetto a quella ottenibile con un claico circuito C. 5
52 L uo delle capacità commutate permette di fare dipendere i parametri del filtro non da valori aoluti di grandezze non omogenee fra loro (e. C, prodotto di reitenza e capacità) ma da omogenee fra loro (e. C, prodotto di reitenza e capacità) ma da APPOTI di capacità, quindi di grandezze omogenee e molto ben controllabili. L errore ul valore aoluto di un parametro può arrivare al 3%, mentre l errore ul rapporto di valori di capacità può anche riduri a olo lo.%. Inoltre l'eliminazione dei reitori determina una diminuzione della potenza diipata. 5
53 53
1_ Filtro passa-basso Con A(jw) si indica la funzione di trasferimento del filtro, il cui modulo A assume un valore costante
 si indica la funzione di trasferimento del filtro, il cui modulo A assume un valore costante") PPUNTI DI ELETTNIC FILTI TTII 6 Campi di applicazione I filtri nel ettore dell elettronica ono utilizzati per : attenuare i diturbi, il rumore e le ditorioni applicati al egnale utile; eparare due egnale
PPUNTI DI ELETTNIC FILTI TTII 6 Campi di applicazione I filtri nel ettore dell elettronica ono utilizzati per : attenuare i diturbi, il rumore e le ditorioni applicati al egnale utile; eparare due egnale
Esercizio. Il circuito di figura rappresenta un filtro passa-banda. Dopo aver ricavato la funzione di trasferimento, sapendo che
 Eercizio Clae 5ª Elettronici Materia Sitemi Argomento Funzioni di traferimento Il circuito di figura rappreenta un filtro paa-banda. Dopo aver ricavato la funzione di traferimento, apendo che R = 2k Ω
Eercizio Clae 5ª Elettronici Materia Sitemi Argomento Funzioni di traferimento Il circuito di figura rappreenta un filtro paa-banda. Dopo aver ricavato la funzione di traferimento, apendo che R = 2k Ω
Esercizio no.1 soluzione a pag.5
 Edutecnica.it Eercizi ui filtri attivi Eercizio no. oluzione a pag. Si vuole realizzare un filtro paa-bao del I ordine con rapporto di amplificazione K0 e frequenza di taglio f T 0kHz uando la reitenza
Edutecnica.it Eercizi ui filtri attivi Eercizio no. oluzione a pag. Si vuole realizzare un filtro paa-bao del I ordine con rapporto di amplificazione K0 e frequenza di taglio f T 0kHz uando la reitenza
Il Luogo delle Radici
 Il Luogo delle Radici Il luogo delle radici è un procedimento, otanzialmente grafico, che permette di analizzare come varia il poizionamento dei poli di un itema di controllo in retroazione al variare
Il Luogo delle Radici Il luogo delle radici è un procedimento, otanzialmente grafico, che permette di analizzare come varia il poizionamento dei poli di un itema di controllo in retroazione al variare
COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI 1/(1+T) E T/(1+T) T T. non compensata compensata H V
 E T/(1+T) T T. non compensata compensata H V") COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI /(+T) E T/(+T) vˆ = = G G vg c vg vˆ + T vˆ g + G g c vref T + vˆ H + T vˆ ref Z ref c out iˆ Z load out + T iˆ load T non compenata compenata H ( ) Gvd ( ) V
COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI /(+T) E T/(+T) vˆ = = G G vg c vg vˆ + T vˆ g + G g c vref T + vˆ H + T vˆ ref Z ref c out iˆ Z load out + T iˆ load T non compenata compenata H ( ) Gvd ( ) V
Corso Tecnologie dei Sistemi di Controllo. Controllo PID
 Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Esercizi di Controlli Automatici - 9 A.A. 2009/2010
 Eercizi di Controlli Automatici - 9 A.A. 2009/200 Eercizio. Dato il eguente chema, in cui gli amplificatori operazionali ono uppoti ideali, i calcoli la funzione di traferimento G() tra v in (t) e v out
Eercizi di Controlli Automatici - 9 A.A. 2009/200 Eercizio. Dato il eguente chema, in cui gli amplificatori operazionali ono uppoti ideali, i calcoli la funzione di traferimento G() tra v in (t) e v out
Bode Diagram. 1.2 Determinare il valore del guadagno del sistema. Disegnare gli zeri ed i poli nel piano complesso.
 5 Luglio 3 econda prova Sia dato un itema dinamico con funzione di traferimento G(), i cui diagrammi di Bode, del modulo e della fae, ono di eguito rappreentati: 6 Bode Diagram Phae (deg) Magnitude (db)
5 Luglio 3 econda prova Sia dato un itema dinamico con funzione di traferimento G(), i cui diagrammi di Bode, del modulo e della fae, ono di eguito rappreentati: 6 Bode Diagram Phae (deg) Magnitude (db)
K c s h. P(s) 1/K d. U(s) + Y(s)
 1/K d. U(s) + Y(s)") Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Corso di Fondamenti di Automatica A.A. 2015/16. Diagrammi di Bode
 1 Coro di Fondamenti di Automatica A.A. 015/16 Diagrammi di Bode Prof. Carlo Coentino Dipartimento di Medicina Sperimentale e Clinica Univerità degli Studi Magna Graecia di Catanzaro tel: 0961-3694051
1 Coro di Fondamenti di Automatica A.A. 015/16 Diagrammi di Bode Prof. Carlo Coentino Dipartimento di Medicina Sperimentale e Clinica Univerità degli Studi Magna Graecia di Catanzaro tel: 0961-3694051
ẋ 2 = x 1 10x u y = x 1 + x 2 [
 Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 21 NOVEMBRE d 2 (t) r(t) e(t) y(t) C(s)G(s)
 r(t) e(t) y(t) C(s)G(s)") ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
Compito di Fondamenti di Automatica settembre 2006
 Compito di Fondamenti di Automatica ettembre 2006 Eercizio 1. Si conideri lo chema di figura (operazionale ideale, eccetto per il guadagno che puó eere definito da una G(), reitenze uguali, condenatori
Compito di Fondamenti di Automatica ettembre 2006 Eercizio 1. Si conideri lo chema di figura (operazionale ideale, eccetto per il guadagno che puó eere definito da una G(), reitenze uguali, condenatori
Esercitazione di Controlli Automatici 1 n 6
 4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Controllori PID. Fondamenti di Automatica Prof. Silvia Strada
 Controllori Fondamenti di Automatica rof. Silvia Strada efinizione controllori (ad azione roporzionale, ntegrale e erivativa) ono caratterizzati (idealmente) dalla legge di controllo: u ( t ) e( t ) e(
Controllori Fondamenti di Automatica rof. Silvia Strada efinizione controllori (ad azione roporzionale, ntegrale e erivativa) ono caratterizzati (idealmente) dalla legge di controllo: u ( t ) e( t ) e(
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST
 ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
Esame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento) 16 Giugno 2008 (Bozza di soluzione)
 16 Giugno 2008 (Bozza di soluzione)") Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
Lezione 9. Schemi di controllo avanzati parte prima. F. Previdi - Controlli Automatici - Lez. 9 1
 Lezione 9. Schemi di controllo avanzati parte prima F. Previdi - Controlli Automatici - Lez. 9 Schema. Regolatori in anello aperto Controllo multivariabile:. Regolatori di diaccoppiamento 3. Controllo
Lezione 9. Schemi di controllo avanzati parte prima F. Previdi - Controlli Automatici - Lez. 9 Schema. Regolatori in anello aperto Controllo multivariabile:. Regolatori di diaccoppiamento 3. Controllo
Specifiche sulla banda passante negli amplificatori a microonde
 pecifiche ulla banda paante negli amplificatori a microonde Gli amplificatori a microonde trattano egnali modulati, il cui pettro ha in genere una etenione B molto minore della frequenza centrale f 0 (portante).
pecifiche ulla banda paante negli amplificatori a microonde Gli amplificatori a microonde trattano egnali modulati, il cui pettro ha in genere una etenione B molto minore della frequenza centrale f 0 (portante).
1 = (parabola unitaria) si determini l errore di regolazione a regime:
 si determini l errore di regolazione a regime:") A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
Regolazione e Controllo dei Sistemi Meccanici Figura 1: Schema di un montacarichi.
 Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Esercitazione di Controlli Automatici 1 n 2. a.a. 2006/07
 6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
Criterio di stabilità di Bode. tramite la risposta in frequenza viene indicata come condizione di innesco dell instabilità la
 Criterio di tabilità di Bode Sia dato un itema retroazionato con f.d.t. eprea F( H ( tramite la ripota in frequenza viene indicata come condizione di inneco dell intabilità la G ( j H ( j 0 cioè G ( j
Criterio di tabilità di Bode Sia dato un itema retroazionato con f.d.t. eprea F( H ( tramite la ripota in frequenza viene indicata come condizione di inneco dell intabilità la G ( j H ( j 0 cioè G ( j
Corso di Microonde II
 POLITECNICO DI MILANO Coro di Microonde II Lezi n. 4: Progetto amplificatori Lineari a ingolo tadio Progetto di Amplificatori con dipoitivi potenzialmente intabili Nel cao di dipoitivi potenzialmente intabili,
POLITECNICO DI MILANO Coro di Microonde II Lezi n. 4: Progetto amplificatori Lineari a ingolo tadio Progetto di Amplificatori con dipoitivi potenzialmente intabili Nel cao di dipoitivi potenzialmente intabili,
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 febbraio 214 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 febbraio 214 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Semplificazioni di schemi a blocchi
 Semplificazioni di chemi a blocchi 4. Blocchi in cacata 4. Blocchi in parallelo 4.3 Blocchi in catena chiua (reazione negativa) 4.4 Blocchi in catena chiua (reazione poitiva) 4.5 Spotamento di blocchi
Semplificazioni di chemi a blocchi 4. Blocchi in cacata 4. Blocchi in parallelo 4.3 Blocchi in catena chiua (reazione negativa) 4.4 Blocchi in catena chiua (reazione poitiva) 4.5 Spotamento di blocchi
Sistemi di Controllo - Controlli Automatici (Parte B) Ingegneria Meccanica e Ingegneria del Veicolo
 Ingegneria Meccanica e Ingegneria del Veicolo") Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Fondamenti di Automatica Figura 1: Schema di centrifuga industriale: a) vista in assonometria b) vista frontale.
 vista in assonometria b) vista frontale.") Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
1/s. 1/s = ,43. Con questa scelta dei generatori possiamo utilizzare ancora la formula di Millman: + s
 5. ipota forzata. ircuito imbolico: / / /( on la traformazione del generatore di corrente i ha lo chema eguente. / / /( Formula di Millman: dove p j, ( j ( j ( ( 5 [( ] 8 8,4. t 5 t Antitraformata: v(
5. ipota forzata. ircuito imbolico: / / /( on la traformazione del generatore di corrente i ha lo chema eguente. / / /( Formula di Millman: dove p j, ( j ( j ( ( 5 [( ] 8 8,4. t 5 t Antitraformata: v(
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 15 luglio 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 15 luglio 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Pertanto la funzione di trasferimento complessiva in catena aperta (open-loop) W(S) del sistema di controllo sarà data da:
 W(S) del sistema di controllo sarà data da:") M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
Controllo di Azionamenti Elettrici. Lezione n 3. Caratteristiche e predisposizione dei regolatori PID
 Controllo di Azionamenti Elettrici Lezione n 3 Coro di Laurea in Ingegneria dell Automazione Facoltà di Ingegneria Univerità degli Studi di alermo Caratteritiche e predipoizione dei regolatori ID 1 Introduzione
Controllo di Azionamenti Elettrici Lezione n 3 Coro di Laurea in Ingegneria dell Automazione Facoltà di Ingegneria Univerità degli Studi di alermo Caratteritiche e predipoizione dei regolatori ID 1 Introduzione
Capitolo. Semplificazioni di schemi a blocchi. 4.1 Blocchi in cascata. 4.2 Blocchi in parallelo. 4.3 Blocchi in catena chiusa (reazione negativa)
") Capitolo 4 Semplificazioni di chemi a blocchi 4. Blocchi in cacata 4. Blocchi in parallelo 4.3 Blocchi in catena chiua (reazione negativa) 4.4 Blocchi in catena chiua (reazione poitiva) 4.5 Spotamento
Capitolo 4 Semplificazioni di chemi a blocchi 4. Blocchi in cacata 4. Blocchi in parallelo 4.3 Blocchi in catena chiua (reazione negativa) 4.4 Blocchi in catena chiua (reazione poitiva) 4.5 Spotamento
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I
 SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof Bittanti, BIO A-K) Settembre Si conideri il eguente itema dinamico a tempo continuo decritto mediante chema a blocchi: ut () _ yt () 9 a Si calcoli la funione
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof Bittanti, BIO A-K) Settembre Si conideri il eguente itema dinamico a tempo continuo decritto mediante chema a blocchi: ut () _ yt () 9 a Si calcoli la funione
ω 1+ ω ω = = 1 = G Vi = = Calcolo dell uscita del circuito di figura: Si definisce Funzione di Trasferimento il rapporto tra Uscita ed Ingresso:
 DIARAMMI DI BODE alcolo dell ucita del circuito di figura: X j j Vo Vi Vi Vi R X jr R j j Vi jr Si definice Funzione di Traferimento il rapporto tra Ucita ed Ingreo: Vo Vo [] FdT j Vi Vi jr Vo Vi Vo Vi
DIARAMMI DI BODE alcolo dell ucita del circuito di figura: X j j Vo Vi Vi Vi R X jr R j j Vi jr Si definice Funzione di Traferimento il rapporto tra Ucita ed Ingreo: Vo Vo [] FdT j Vi Vi jr Vo Vi Vo Vi
Risonanza. Tracciare gli andamenti del modulo e della fase dell impedenza in funzione della frequenza f per il seguente bipolo: A R 1 R 2
 6 Eercitazioni aggiuntive Eercizio 6. Tracciare gli andamenti del modulo e della fae dell impedenza in funzione della frequenza f per il eguente bipolo: A B [W]; [W]; [mf] Si calcoli l impedenza del bipolo
6 Eercitazioni aggiuntive Eercizio 6. Tracciare gli andamenti del modulo e della fae dell impedenza in funzione della frequenza f per il eguente bipolo: A B [W]; [W]; [mf] Si calcoli l impedenza del bipolo
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Oscillatori sinusoidali /1
 //6 Ocillatori inuoidali / Un ocillatore inuoidale è un itema decritto da una coppia di poli immaginari coniugati. A(j) f (j) Un amplificatore lineare può eere chiuo in un anello di reazione per realizzare
//6 Ocillatori inuoidali / Un ocillatore inuoidale è un itema decritto da una coppia di poli immaginari coniugati. A(j) f (j) Un amplificatore lineare può eere chiuo in un anello di reazione per realizzare
Fondamenti di Automatica
 Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
Prova del 30 Giugno Si consideri il seguente sistema dinamico a tempo continuo: Esercizio 1 = + + U
 Prova del Giugno 4 Eercizio. Si conideri il eguente itema dinamico a tempo continuo: x () t α x() t + u() t x () t x() t u() t x () t x() t x() t ( + α) x() t + u() t yt () x() t.a Si calcoli la funzione
Prova del Giugno 4 Eercizio. Si conideri il eguente itema dinamico a tempo continuo: x () t α x() t + u() t x () t x() t u() t x () t x() t x() t ( + α) x() t + u() t yt () x() t.a Si calcoli la funzione
Controlli Automatici LA Risposte dei sistemi
 //8 Controlli Automatici LA Analii dei itemi dinamici lineari Ripote al gradino di itemi tipici Relazioni Funzione di Traferimento/Ripote Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 5 93 Email: croi@dei.unibo.it
//8 Controlli Automatici LA Analii dei itemi dinamici lineari Ripote al gradino di itemi tipici Relazioni Funzione di Traferimento/Ripote Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 5 93 Email: croi@dei.unibo.it
SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei sistemi in retroazione
 SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei itemi in retroazione R E C G + - Y H G rappreenta il regolatore, l'amplificatore di potenza, l'attuatore ed il itema controllato e prende il
SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei itemi in retroazione R E C G + - Y H G rappreenta il regolatore, l'amplificatore di potenza, l'attuatore ed il itema controllato e prende il
Punto 1 Il sistema proposto di tipo retroazionato può essere rappresentato con lo schema a blocchi riportato in Fig. 1.
 Pag. di SOLUZIONE dei primi 4 punti richieti dalla Prova. Leggo bene il teto e poi? La mia Maetra mi diceva empre: Prima la figura. Punto Il itema propoto di tipo retroazionato può eere rappreentato con
Pag. di SOLUZIONE dei primi 4 punti richieti dalla Prova. Leggo bene il teto e poi? La mia Maetra mi diceva empre: Prima la figura. Punto Il itema propoto di tipo retroazionato può eere rappreentato con
FILTRI in lavorazione. 1
 FILTRI 1 in lavorazione. Introduzione Cosa sono i filtri? C o II filtri sono dei quadripoli particolari, che presentano attenuazione differenziata in funzione della frequenza del segnale applicato in ingresso.
FILTRI 1 in lavorazione. Introduzione Cosa sono i filtri? C o II filtri sono dei quadripoli particolari, che presentano attenuazione differenziata in funzione della frequenza del segnale applicato in ingresso.
coeff. della 1 colonna sono diversi da 0 il sistema è asintoticamente stabile;
 Sitemi Dinamici: Induttore: i = x, v = Lx Condenatore: i = Cx, v = x x = x x = p Maa: x =, dove x u = v M u = F x = x Ocillatore meccanico: x = (Kx M Dx + u), dove Pendolo: x = x x = g l in x + ml u k
Sitemi Dinamici: Induttore: i = x, v = Lx Condenatore: i = Cx, v = x x = x x = p Maa: x =, dove x u = v M u = F x = x Ocillatore meccanico: x = (Kx M Dx + u), dove Pendolo: x = x x = g l in x + ml u k
Introduzione. Esempio di costruzione one del contorno delle radici. Esempio... 4
 Appunti di Controlli Automatici 1 Capitolo 5 parte II Il contorno delle radici Introduzione... 1 Eempio di cotruzione del contorno delle radici... 1 Eempio... 4 Introduzione Il procedimento per la cotruzione
Appunti di Controlli Automatici 1 Capitolo 5 parte II Il contorno delle radici Introduzione... 1 Eempio di cotruzione del contorno delle radici... 1 Eempio... 4 Introduzione Il procedimento per la cotruzione
Laboratorio di Automazione
 Laboratorio di Automazione CASY-DEIS el. 05-2093875 E-mail: mcapiluppi@dei.unibo.it http://www.-lar.dei.unibo.it/~mcapiluppi Schema tecnologico di un itema di controllo Y p regolatore interfaccia D/A attuatore
Laboratorio di Automazione CASY-DEIS el. 05-2093875 E-mail: mcapiluppi@dei.unibo.it http://www.-lar.dei.unibo.it/~mcapiluppi Schema tecnologico di un itema di controllo Y p regolatore interfaccia D/A attuatore
I sistemi retroazionati. Per lo studio si può utilizzarne uno a reazione unitaria per rendere standard i risultati:
 I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
SEGNALI E SISTEMI 31 agosto 2017
 SEGNALI E SISTEMI 31 agoto 2017 Eercizio 1. [3+3+3+4 punti] Si conideri il modello ingreo/ucita LTI e cauale decritto dalla eguente equazione differenziale: dove a è un parametro reale. d 2 v(t) 2 +(1
SEGNALI E SISTEMI 31 agoto 2017 Eercizio 1. [3+3+3+4 punti] Si conideri il modello ingreo/ucita LTI e cauale decritto dalla eguente equazione differenziale: dove a è un parametro reale. d 2 v(t) 2 +(1
Controlli Automatici (AUT) - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a
 - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a") Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 2014
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
Esercitazioni di Controlli Automatici L-A
 Eercitazioni di Controlli Automatici L-A Progetto di un regolatore Data le eguente funzione di traferimento G(): G() = + 0 3 + 7. 2 + 0.7 + () i richiede di progettare un regolatore R() che poto in cacata
Eercitazioni di Controlli Automatici L-A Progetto di un regolatore Data le eguente funzione di traferimento G(): G() = + 0 3 + 7. 2 + 0.7 + () i richiede di progettare un regolatore R() che poto in cacata
Stabilità e punti di equilibrio
 Capitolo 4 Stabilità e punti di equilibrio 4. Stabilità di un itema epreo da un equazione di tato Si è motrato come un itema poa eere epreo con il itema cotituito dalle equazioni 3.6 e 3.7 ovvero: X()
Capitolo 4 Stabilità e punti di equilibrio 4. Stabilità di un itema epreo da un equazione di tato Si è motrato come un itema poa eere epreo con il itema cotituito dalle equazioni 3.6 e 3.7 ovvero: X()
FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A ) Corso di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno
 Corso di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno") Voto Cognome/Nome & No. Matricola FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A. 25 26) Coro di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno PROVA DEL 8 SETTEMBRE
Voto Cognome/Nome & No. Matricola FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A. 25 26) Coro di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno PROVA DEL 8 SETTEMBRE
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
Modellistica e controllo PID di un pendolo inverso
 Modellitica e controllo PID di un pendolo invero Note per le lezioni del coro di Controlli Automatici - A.A. 2009/0 Prof.a Maria Elena Valcher Modellitica Un ata di maa m è incernierata ad un carrello
Modellitica e controllo PID di un pendolo invero Note per le lezioni del coro di Controlli Automatici - A.A. 2009/0 Prof.a Maria Elena Valcher Modellitica Un ata di maa m è incernierata ad un carrello
CONTROLLO DIGITALE LAUREA TRIENNALE IN ING. INFORMATICA E DELL AUTOMAZIONE A.A. 2017/2018 LAUREA MAGISTRALE IN ING. ELETTRICA A.A.
 LAUREA TRIENNALE IN ING. INFORMATICA E DELL AUTOMAZIONE A.A. 7/8 LAUREA MAGISTRALE IN ING. ELETTRICA A.A. 7/8 APPELLO 9//8 Sia aegnata la eguente equazione alle differenze: y(k).3679y(k ) +.3679y(k ) =.3679u(k
LAUREA TRIENNALE IN ING. INFORMATICA E DELL AUTOMAZIONE A.A. 7/8 LAUREA MAGISTRALE IN ING. ELETTRICA A.A. 7/8 APPELLO 9//8 Sia aegnata la eguente equazione alle differenze: y(k).3679y(k ) +.3679y(k ) =.3679u(k
Capitolo. Il comportamento dei sistemi di controllo in regime permanente. 6.1 Classificazione dei sistemi di controllo. 6.2 Errore statico: generalità
 Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Appunti ed esercitazioni di Microonde 2
 Appunti ed eercitazioni di Microonde Studio di una linea priva di perdite in regime impulivo di impedenza caratteritica =5Ω, chiua u di un carico R erie avente R==5Ω, =mh, =nf. Si aume come velocità di
Appunti ed eercitazioni di Microonde Studio di una linea priva di perdite in regime impulivo di impedenza caratteritica =5Ω, chiua u di un carico R erie avente R==5Ω, =mh, =nf. Si aume come velocità di
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito A del 23 Dicembre 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Indicare il numero e il tipo di parametri che caratterizzano la funzione
Teoria dei Sitemi e del Controllo Compito A del 23 Dicembre 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Indicare il numero e il tipo di parametri che caratterizzano la funzione
Lezione 11. Progetto del controllore
 Lezione Progetto del controllore Specifiche di progetto Conideriamo nuovamente un itema di controllo in retroazione: d y + + + y () G() + + n Fig : Sitema di controllo Supporremo aegnata la funzione di
Lezione Progetto del controllore Specifiche di progetto Conideriamo nuovamente un itema di controllo in retroazione: d y + + + y () G() + + n Fig : Sitema di controllo Supporremo aegnata la funzione di
Tecnologie HW per TLC
 ICT Center of Excellence For Reearch, Innovation, Education, and life-long long Learning Politecnico di Milano Tecnologie HW per TLC Circuiti a Microonde (II Lezione) Docente: Macchiarella Giueppe Politecnico
ICT Center of Excellence For Reearch, Innovation, Education, and life-long long Learning Politecnico di Milano Tecnologie HW per TLC Circuiti a Microonde (II Lezione) Docente: Macchiarella Giueppe Politecnico
Esercitazione 16 Novembre 2012 Circuiti dinamici del secondo ordine. t come riportato in figura.
 Eercitazione Noembre ircuiti dinamici del econdo ordine ircuito L- erie Per quanto riguarda queto circuito, l eercizio egue la traccia della oluzione del compito d eame numero, reperibile in rete al olito
Eercitazione Noembre ircuiti dinamici del econdo ordine ircuito L- erie Per quanto riguarda queto circuito, l eercizio egue la traccia della oluzione del compito d eame numero, reperibile in rete al olito
CAPITOLO 9 RISPOSTA IN FREQUENZA
 77 CAPIOO 9 RISPOSA IN FREQUENZA Negli amplificatori tudiati nei capitoli precedenti abbiamo calcolato più volte l amplificazione relativa a egnali genericamente alternati, enza preoccuparci di quale foe
77 CAPIOO 9 RISPOSA IN FREQUENZA Negli amplificatori tudiati nei capitoli precedenti abbiamo calcolato più volte l amplificazione relativa a egnali genericamente alternati, enza preoccuparci di quale foe
1. (solo nuovo ordinamento e diploma) Dato il sistema di controllo raffigurato, con
 Dato il sistema di controllo raffigurato, con") Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito A del 5 Febbraio 05 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione in forma chiua dell equazione differenziale ẋ(t) =
Teoria dei Sitemi e del Controllo Compito A del 5 Febbraio 05 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione in forma chiua dell equazione differenziale ẋ(t) =
ERRORE STATICO. G (s) H(s) Y(s) E(s) X (s) YRET(s)
 H(s) Y(s) E(s) X (s) YRET(s)") Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Esempi Calcolo Antitrasformate
 Eempi Calcolo Antitraformate Note per il Coro di FdA - Info April, 05 Il punto focale del coiddetto metodo di Heaviide per l antitraformazione di un egnale regolare a traformata razionale conite nel riconocere
Eempi Calcolo Antitraformate Note per il Coro di FdA - Info April, 05 Il punto focale del coiddetto metodo di Heaviide per l antitraformazione di un egnale regolare a traformata razionale conite nel riconocere
ESEMPI DI ANALISI DI CIRCUITI DINAMICI LINEARI. corso: Teoria dei Circuiti. docente: Stefano PASTORE. 1 Esempio di tableau dinamico (tempo e Laplace)
") ESEMPI DI ANALISI DI CIRCUITI DINAMICI LINEARI coro: Teoria dei Circuiti docente: Stefano PASTORE 1 Eempio di tableau dinamico (tempo e Laplace) 1.1 Dominio del tempo Conideriamo il eguente circuito dinamico
ESEMPI DI ANALISI DI CIRCUITI DINAMICI LINEARI coro: Teoria dei Circuiti docente: Stefano PASTORE 1 Eempio di tableau dinamico (tempo e Laplace) 1.1 Dominio del tempo Conideriamo il eguente circuito dinamico
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi Teoria dei Sitemi e del Controllo Compito A del 24 Giugno 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Nel cao di itemi lineari continui tempo-varianti, la matrice
Teoria dei Sitemi Teoria dei Sitemi e del Controllo Compito A del 24 Giugno 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Nel cao di itemi lineari continui tempo-varianti, la matrice
Calcolo della tensione ammissibile Dovendo essere il grado di sicurezza non inferiore a 3 si ricava che il coefficiente di sicurezza γ è 3 per cui:
 Il recipiente diegnato in figura ha una configurazione cilindrica avente diametro interno D = 000 mm è chiuo con fondi emiferici, eo è itemato u due elle A e B pote ad una ditanza L AB = 7000 mm e fuoriece
Il recipiente diegnato in figura ha una configurazione cilindrica avente diametro interno D = 000 mm è chiuo con fondi emiferici, eo è itemato u due elle A e B pote ad una ditanza L AB = 7000 mm e fuoriece
Elettronica per le telecomunicazioni
 POLITENIO DI TOINO Elettronica per le telecomunicazioni Homework Gruppo: A08 Antona Maria Gabriella Matricola: 482 Degno Angela ita Matricola: 4855 Fiandrino laudio Matricola: 38436 Miggiano Marco Antonio
POLITENIO DI TOINO Elettronica per le telecomunicazioni Homework Gruppo: A08 Antona Maria Gabriella Matricola: 482 Degno Angela ita Matricola: 4855 Fiandrino laudio Matricola: 38436 Miggiano Marco Antonio
Filtri analogici Primi filtri elettrici per ripetitori Tutte le applicazioni di trattamento e trasmissione dei segnali
 Filtri analogici 95 Primi filtri elettrici per ripetitori Tutte le applicazioni di trattamento e tramiione dei egnali Un filtro è un calcolatore analogico componenti poco precii, oggetti a variazioni di
Filtri analogici 95 Primi filtri elettrici per ripetitori Tutte le applicazioni di trattamento e tramiione dei egnali Un filtro è un calcolatore analogico componenti poco precii, oggetti a variazioni di
Progetto di reti correttrici e controllori PID e traduzione nel discreto con il metodo di emulazione
 Progetto di reti correttrici e controllori PID e traduione nel dicreto con il metodo di emulaione Eerciio. Si conideri lo chema di controllo rappreentato in figura dove P () = con a = 40. a + r(t) + S
Progetto di reti correttrici e controllori PID e traduione nel dicreto con il metodo di emulaione Eerciio. Si conideri lo chema di controllo rappreentato in figura dove P () = con a = 40. a + r(t) + S
Informazioni logistiche e organizzative Applicazione di riferimento. caratteristiche e tipologie di moduli. Circuiti con operazionali reazionati
 Elettronica per telecomunicazioni Contenuto dell unità A Informazioni logistiche e organizzative Applicazione di riferimento caratteristiche e tipologie di moduli Circuiti con operazionali reazionati amplificatori
Elettronica per telecomunicazioni Contenuto dell unità A Informazioni logistiche e organizzative Applicazione di riferimento caratteristiche e tipologie di moduli Circuiti con operazionali reazionati amplificatori
2. METODO DEGLI SPOSTAMENTI O EQUAZIONE DELLA LINEA ELASTICA, PER LA SOLUZIONE DI TRAVI IPERSTATICHE
 METODO DEGLI SPOSTAMENTI CORSO DI PROGETTAZIONE STRUTTURALE B a.a. 00/0 Prof. G. Salerno Appunti elaborati da Arch. C. Provenzano. STRUTTURE IPERSTATICHE Una truttura i dice ipertatica o taticamente indeterminata
METODO DEGLI SPOSTAMENTI CORSO DI PROGETTAZIONE STRUTTURALE B a.a. 00/0 Prof. G. Salerno Appunti elaborati da Arch. C. Provenzano. STRUTTURE IPERSTATICHE Una truttura i dice ipertatica o taticamente indeterminata
Lezione A2 - DDC
 Elettronica per le telecomunicazioni Unità A: Amplificatori, oscillatori, mixer Lezione A.2 Filtri Specifica funzionale e parametri uso di strumenti CAD esempi di realizzazioni con AO tecniche SC 1 Contenuto
Elettronica per le telecomunicazioni Unità A: Amplificatori, oscillatori, mixer Lezione A.2 Filtri Specifica funzionale e parametri uso di strumenti CAD esempi di realizzazioni con AO tecniche SC 1 Contenuto
L equazione che descrive il moto del corpo è la seconda legge della dinamica
 Eercizio ul piano inclinato La forza peo è data dalla formula p mg Allora e grandezze geometriche: poono eere critte utilizzando l angolo di inclinazione del piano oppure le Angolo di inclinazione orza
Eercizio ul piano inclinato La forza peo è data dalla formula p mg Allora e grandezze geometriche: poono eere critte utilizzando l angolo di inclinazione del piano oppure le Angolo di inclinazione orza
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito del Gennaio 206 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione generale dell equazione alle differenze x(k +) = Ax(k)+Bu(k)
Teoria dei Sitemi e del Controllo Compito del Gennaio 206 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione generale dell equazione alle differenze x(k +) = Ax(k)+Bu(k)
APPUNTI DI ELETTRONICA V D FILTRI ATTIVI. Campi di applicazione. I filtri nel settore dell elettronica sono utilizzati per:
 APPUNTI DI ELETTRONICA V D FILTRI ATTIVI Campi di applicazione I filtri nel settore dell elettronica sono utilizzati per: attenuare i disturbi, il rumore e le distorsioni applicati al segnale utile; separare
APPUNTI DI ELETTRONICA V D FILTRI ATTIVI Campi di applicazione I filtri nel settore dell elettronica sono utilizzati per: attenuare i disturbi, il rumore e le distorsioni applicati al segnale utile; separare
L. Zarri - Azionamenti Elettrici L
 Azionamenti Elettrici M AA. 2010/2011 Tecniche avanzate per il controllo di azionamenti elettrici Ing. Luca Zarri DIE Univeritá degli Studi di Bologna Viale Riorgimento, 2 40136 Bologna Tel. 0512093572/
Azionamenti Elettrici M AA. 2010/2011 Tecniche avanzate per il controllo di azionamenti elettrici Ing. Luca Zarri DIE Univeritá degli Studi di Bologna Viale Riorgimento, 2 40136 Bologna Tel. 0512093572/
Definizione delle specifiche per un sistema di controllo a retroazione unitaria
 Definizione delle pecifiche per un itema di controllo a retroazione unitaria Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento
Definizione delle pecifiche per un itema di controllo a retroazione unitaria Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento
Lezione 18. Stabilità di sistemi retroazionati. F. Previdi - Fondamenti di Automatica - Lez. 18 1
 Lezione 18. Stabilità di itemi retroazionati F. Previdi - Fondamenti di Automatica - Lez. 18 1 Schema 1. Stabilità di itemi retroazionati 2. Diagramma di Nyquit 3. Criterio di Nyquit 4. Etenioni del Criterio
Lezione 18. Stabilità di itemi retroazionati F. Previdi - Fondamenti di Automatica - Lez. 18 1 Schema 1. Stabilità di itemi retroazionati 2. Diagramma di Nyquit 3. Criterio di Nyquit 4. Etenioni del Criterio
1. Introduzione Il convertitore a semplice semionda Il sistema di controllo... 5
 . Introduzione... 2 2. Il convertitore a emplice emionda... 3 2. Il itema di controllo... 5 3. Il convertitore monofae nella configurazione a ponte... 7 4. Il fenomeno della commutazione... . Introduzione
. Introduzione... 2 2. Il convertitore a emplice emionda... 3 2. Il itema di controllo... 5 3. Il convertitore monofae nella configurazione a ponte... 7 4. Il fenomeno della commutazione... . Introduzione
FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A ) Corso di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno
 Corso di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno") Voto Cognome/Nome & No. Matricola FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A. 5 6) Coro di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno PROVA DEL 6 GENNAIO 7 Ripondere
Voto Cognome/Nome & No. Matricola FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A. 5 6) Coro di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno PROVA DEL 6 GENNAIO 7 Ripondere
Tecnologie Informatiche per l Automazione Industriale
 Tecnologie Informatiche per l Automazione Indutriale Prof. Gianmaria De Tommai Regolatori PID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno accademico N46
Tecnologie Informatiche per l Automazione Indutriale Prof. Gianmaria De Tommai Regolatori PID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno accademico N46
Lezione 31. Cenni di controllo digitale. F. Previdi - Fondamenti di Automatica - Lez. 31 1
 Lezione 31. Cenni di controllo digitale F. Previdi - Fondamenti di Automatica - Lez. 31 1 Schema 1. Introduzione 2. Campionamento e Tenuta 3. Aliaing 4. Teorema del campionamento 5. Progetto mediante dicretizzazione
Lezione 31. Cenni di controllo digitale F. Previdi - Fondamenti di Automatica - Lez. 31 1 Schema 1. Introduzione 2. Campionamento e Tenuta 3. Aliaing 4. Teorema del campionamento 5. Progetto mediante dicretizzazione
Sistemi e automazione
 3 Idee per il tuo futuro Paolo Guidi Stefano Mirandola Sitemi e automazione per Meccanica ed Energia Componenti e circuiti elettronici Complementi di teoria dei itemi Fondamenti di pneumatica e oleodinamica
3 Idee per il tuo futuro Paolo Guidi Stefano Mirandola Sitemi e automazione per Meccanica ed Energia Componenti e circuiti elettronici Complementi di teoria dei itemi Fondamenti di pneumatica e oleodinamica
Controlli Automatici LB Scenari di Controllo
 Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 51 2932 Email: croi@dei.unibo.it UR: www-lar.dei.unibo.it/~croi 1. come vincoli ulla funzione d'anello 2. Scenari di controllo 3. inee guida per il progetto
Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 51 2932 Email: croi@dei.unibo.it UR: www-lar.dei.unibo.it/~croi 1. come vincoli ulla funzione d'anello 2. Scenari di controllo 3. inee guida per il progetto
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sitemi di Automazione rof. Gianmaria De Tommai Lezione 4 Regolatori ID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno
Facoltà di Ingegneria Tecnologie dei Sitemi di Automazione rof. Gianmaria De Tommai Lezione 4 Regolatori ID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno
ESERCIZIO 1 L/2 C.R. D
 SRIZIO Il itema di corpi rigidi in figura è oggetto ad uno potamento impreo (cedimento), in direzione verticale e vero il bao, in corripondenza del vincolo in. Si vuole determinare la nuova configurazione
SRIZIO Il itema di corpi rigidi in figura è oggetto ad uno potamento impreo (cedimento), in direzione verticale e vero il bao, in corripondenza del vincolo in. Si vuole determinare la nuova configurazione
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito del Febbraio 206 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere l andamento temporale della funzione di ucita y(k), oluzione dell
Teoria dei Sitemi e del Controllo Compito del Febbraio 206 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere l andamento temporale della funzione di ucita y(k), oluzione dell
ELETTRONICA I - Ingegneria MEDICA. Caratteristiche e criteri di Sintesi (progetto) di FILTRI analogici attivi e passivi
 di FILTRI analogici attivi e passivi") ELETTRONICA I - Ingegneria MEDICA Caratteristiche e criteri di Sintesi (progetto) di FILTRI analogici attivi e passivi FILTRI Caratterizzazione Caratterizzazione nel dominio del tempo e della frequenza
ELETTRONICA I - Ingegneria MEDICA Caratteristiche e criteri di Sintesi (progetto) di FILTRI analogici attivi e passivi FILTRI Caratterizzazione Caratterizzazione nel dominio del tempo e della frequenza
Funzioni razionali proprie
 Funzioni razionali proprie Riga 5: P n P αk αkt n e = R α k k k e = = Q Q' α k α t k P e Q ono polinomi di Il grado di P è inferiore a quello di Q α k k=,..n ono gli zeri tutti emplici di Q R α = P α α
Funzioni razionali proprie Riga 5: P n P αk αkt n e = R α k k k e = = Q Q' α k α t k P e Q ono polinomi di Il grado di P è inferiore a quello di Q α k k=,..n ono gli zeri tutti emplici di Q R α = P α α
Esercizi svolti di geometria delle aree Alibrandi U., Fuschi P., Pisano A., Sofi A. ESERCIZIO n.7
 ESERCZO n.7 Data la ezione cava riportata in Figura, determinare: a) gli ai principali centrali di inerzia; b) l ellie principale centrale di inerzia; c) il nocciolo centrale di inerzia. cm cm A#7 . Determinazione
ESERCZO n.7 Data la ezione cava riportata in Figura, determinare: a) gli ai principali centrali di inerzia; b) l ellie principale centrale di inerzia; c) il nocciolo centrale di inerzia. cm cm A#7 . Determinazione