Definizione delle specifiche per un sistema di controllo a retroazione unitaria
|
|
|
- Aurelia Tucci
- 8 anni fa
- Visualizzazioni
Transcript
1 Definizione delle pecifiche per un itema di controllo a retroazione unitaria

2 Obiettivi del controllo Il itema di controllo deve eere progettato in modo da garantire un buon ineguimento dei egnali di riferimento nonotante la preenza di diturbi, rumori ed incertezze parametriche

3 Obiettivi del controllo Stabilità robuta Fedeltà di ripota regolazione o ineguimento Attenuazione dei diturbi ulla catena diretta Attenuazione dei rumori di miura Robutezza alle variazioni parametriche

4 Vogliamo eprimere gli obiettivi del controllo tramite un numero limitato di parametri quantitativi che devono eere garantiti dal progettita SPECIFICHE DEL CONTROLLO

5 Claificazione delle pecifiche Specifiche ul itema a catena aperta L nel dominio della frequenza Specifiche ul itema a catena chiua W nel dominio della frequenza Specifiche ul itema a catena aperta L nel dominio del tempo Specifiche ul itema a catena chiua W nel dominio del tempo

6 Schema di controllo e notazioni R E M - C P D Y Dm C controllore o regolatore LTI, SISO P proceo LTI, SISO R egnale di riferimento E egnale errore M variabile manipolabile Y variabile di ucita D diturbo ulla catena diretta Dm rumore di miura

7 Funzioni di traferimento ignificative C P R E M Y - Dm D T S complementare enitività T enitività S Dm T D S R T Dm P C P C D P C R P C P C Y

8 Stabilità robuta L effetto delle perturbazioni ulle grandezze che caratterizzano il itema deve etingueri una volta venuta meno la perturbazione, ciò è garantito dal fatto che il itema a ciclo chiuo ia aintoticamente tabile La tabilità deve eere garantita anche a fronte di variazioni parametriche o incertezze ui parametri, il itema deve quindi avere opportuni valori di margine di fae Mφ e di guadagno Ma Se vale il criterio di Bode è ufficiente utilizzare Mφ

9 Fedeltà di ripota Il itema controllato deve ineguire il egnale di riferimento con accuratezza adeguata La fedeltà di ripota deve eere valutata: - per egnali canonici - per egnali inuoidali - a regime - in tranitorio

10 Fedeltà di ripota a regime per egnali canonici Si può imporre il comportamento del itema a regime per un certo numero di egnali canonici coniderati rappreentativi del funzionamento del itema controllato Tali pecifiche portano a definire il valore del guadagno di L ed il numero di poli nell origine di L tipo di itema

11

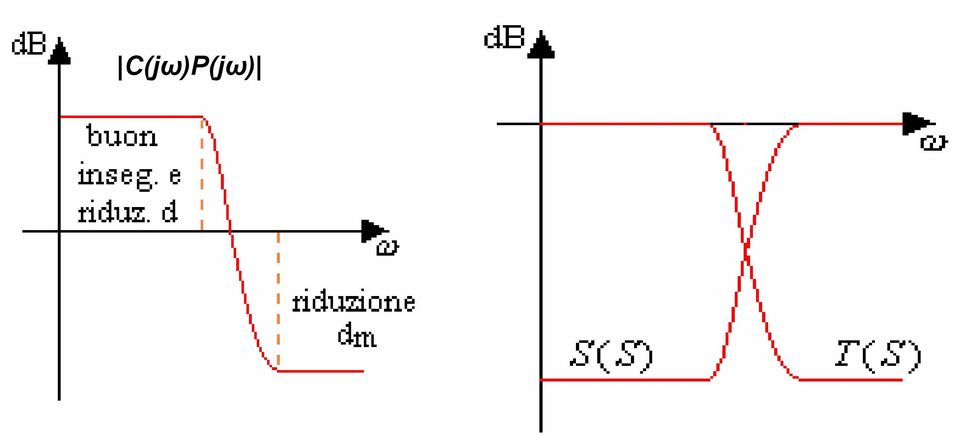
12 Fedeltà di ripota a regime per egnali inuoidali Si deve garantire Tjω in una banda ufficientemente ampia, dipendente dalle caratteritiche del egnale di ingreo Le pecifiche poono riguardare banda paante B e modulo di rionanza Mr Analogamente i può garantire CjωPjω >> in una banda opportuna definita dalla pulazione di attraveramento ωt

13 CjωPjω
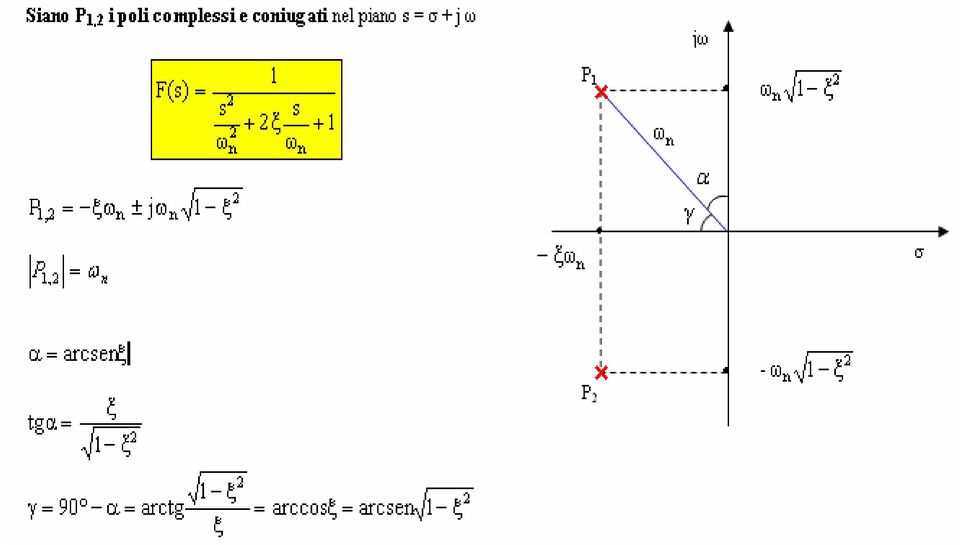
14 Fedeltà di ripota in tranitorio per egnali canonici Si fa in genere riferimento alla ripota al gradino, aumendo che abbia la forma tipica dei itemi tabili di econdo ordine Come parametri indicativi i utilizzano quindi: %, ta, t o analogamente la poizione di una coppia di poli c.c. nell ipotei che W ia a poli dominanti

15
16 y G t,02 0,98 0,9 0, t t t ŝ y ŝ % ω n G 3 ξω t p y 00ŝ π γ ξ G 2 y G ω n Ta 2 % 3 Re T a 5 % P n,2 ξ 2 t 3τ e πξ ξ 2 π arctg ξ ξ 2

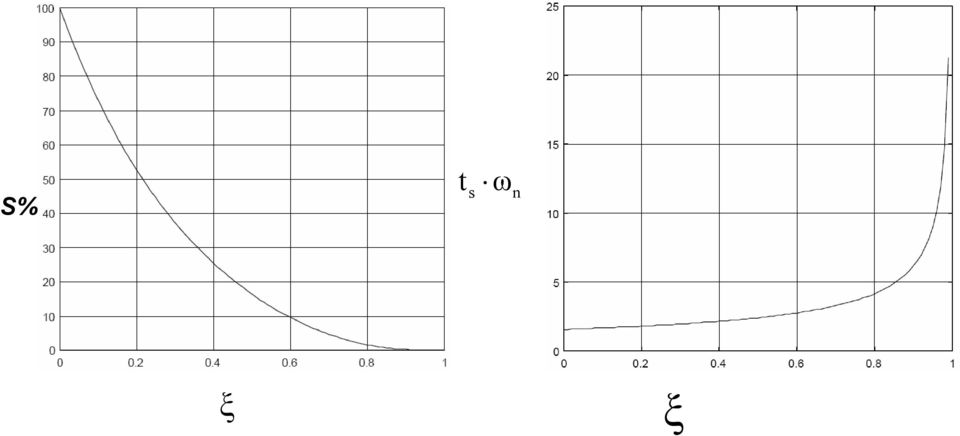
17 S% t ω n ξ ξ
18 Attenuazione dei diturbi ulla catena diretta: ripota in tranitorio per egnali canonici Si utilizzano gli tei parametri utilizzati per la ripota a riferimenti a gradino perché la funzione di ripota al diturbo ha gli tei poli della W

19 Attenuazione dei diturbi ulla catena diretta: ripota a regime per egnali canonici Biogna cegliere appropriatamente il guadagno ed il tipo di itema della f.d.t. a monte del punto di inerzione del diturbo cegliendo le condizioni più retrittive tra quelle impote dalle pecifiche ai riferimenti e quelle impote dalle pecifiche ai diturbi

20 Attenuazione dei diturbi ulla catena diretta: ripota a regime per egnali inuoidali Ricordando le relazioni: T S complementare enitività T enitività S Dm T D S R T Dm P C P C D P C R P C P C Y biogna agire in modo da rendere Sjω << nella banda di frequenza in cui agice il diturbo, un parametro rappreentativo può quindi eere B Analogamente è poibile agire in modo da rendere Cjω Pjω >> ed uare come parametri il guadagno e la ωt della L CjωPjω

21 Reiezione dei diturbi di miura Ricordando le relazioni: T S complementare enitività T enitività S Dm T D S R T Dm P C P C D P C R P C P C Y biogna agire in modo da rendere Tjω << nella banda di frequenza in cui agice il rumore di miura, un parametro rappreentativo può quindi eere anche in queto cao B Analogamente è poibile agire in modo da rendere Cjω Pjω << CjωPjω N.B. e la banda in cui agicono i riferimenti non è digiunta da quella in cui agicono i diturbi rumori di miura è neceario ricorrere a chemi di controllo a più gradi di libertà È in ogni cao opportuno progettare la catena di miura in modo da ridurre i rumori
22 Robutezza della fedeltà di ripota ripetto alle variazioni parametriche Ricordando la definizione di enibilità alle variazioni parametriche per i itemi in retroazione: S α SP C S P S α W c riulta che per garantire la robutezza alle variazioni parametriche è neceario oddifare le tee condizioni già vite per l attenuazione dei diturbi ulla catena diretta
23 Riepilogo Le pecifiche che abbiamo vito poono eere claificate nel modo eguente: Specifiche ul itema a catena aperta L nel dominio della frequenza Specifiche ul itema a catena chiua W nel dominio della frequenza Specifiche ul itema a catena chiua W nel dominio del tempo K, TIPO, Mφ, Ma, ωt B, Mr S%, t, ta, ξ, ωn
24 Evidenziamo alcune relazioni, in genere approimate, e valide comunque per itemi a poli dominanti c.c., tra le varie pecifiche Poizione dei poli di W e caratteritiche in frequenza di W: B P Banda paante a 3 db B3 ωn 2ξ 2 4ξ 4ξ M R max F jω F j0 2ξ ξ 2 Modulo alla rionanza N.B. ha eno olo per 2 0 < ξ < 2 n.b. quete relazioni ono eatte per itemi di econdo ordine
25
26 Poizione dei poli di W e caratteritiche in frequenza di L: ω 2 4 ω 2ξ 4ξ Pulazione di attraveramento t n [ m ] ϕ rad π 2 arctg 2ξ 2 2ξ 4ξ 4 rad arctg 2ξ 2 2ξ 4ξ 4 rad
27 Mφ ζ
28 Relazioni tra parametri di W nel dominio del tempo e parametri di W nel dominio della frequenza
29
30 Relazioni tra caratteritiche nel dominio della frequenza di L e di W ω t M < ϕ B3 e M < 90 ϕ M R Quete relazioni i deducono dalla carta di Nichol: 0
31 M R 4dB ω t P M G ωb 3 mϕ Carta di Nichol: Margine di fae e di guadagno Banda paante e modulo alla rionanza
32 Coniderando i legami tra le pecifiche i ha quindi che: K e poli 0 di L Fedeltà di ripota a regime per egn. pol. Reiezione dei diturbi polinom. a regime M ϕ, M R, S% Fedeltà di ripota a regime per ingr. Sinuoidali e in tran. Influenza dei diturbi Influenza delle variazioni parametriche ulla tabilità e ulla fedeltà di ripota Fedeltà di ripota in tranitorio ω, B, 3 t t, t a Larghezza della banda in cui i ha un buon ineguimento e la reiezione dei diturbi Larghezza della banda in cui i ha la reiezione dei rumori di mi.
33 Sintei per tentativi nel dominio della frequenza. Tutte le pecifiche vengono ricondotte a quelle che riguardano la L nel dominio della frequenza: guadagno, numero di poli nell origine, pulazione di attraveramento e margine di fae 2. Si modifica, introducendo un regolatore C opportuno, cotituito in genere da reti tandard, la funzione di ripota armonica di L rappreentata tramite diagrammi di Bode fino a fare in modo che ripetti le pecifiche 3. Si effettua la imulazione del itema controllato per verificare che ripetti anche le pecifiche nel dominio del tempo
34 Sintei tramite luogo delle radici. Tutte le pecifiche i riconducono a pecifiche che riguardano la poizione dei poli dominanti di W 2. Dopo avere inerito in L il numero opportuno di poli nell origine i traccia il luogo delle radici 3. Si introducono, tramite C, poli e zeri in modo da modificare il luogo delle radici fino a che, per un valore di k che oddifa le pecifiche tatiche, i poli dominanti del itema rientrino nella zona conentita e il itema è a poli dominanti! 4. Si imula il itema per verificare il oddifacimento delle altre pecifiche
35 Sintei diretta. Si definice una W che ripetti le pecifiche 2. Si determina per via analitica C
Sintesi tramite il luogo delle radici
 Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Capitolo. Il comportamento dei sistemi di controllo in regime permanente. 6.1 Classificazione dei sistemi di controllo. 6.2 Errore statico: generalità
 Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
ERRORE STATICO. G (s) H(s) Y(s) E(s) X (s) YRET(s)
 H(s) Y(s) E(s) X (s) YRET(s)") Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Corso di Microonde II
 POITECNICO DI MIANO Coro di Microonde II ezi n. 3: Generalità ugli amplificatori ineari Coro di aurea pecialitica in Ingegneria delle Telecomunicazi Circuiti attivi a microonde (Amplificatori) V in Z g
POITECNICO DI MIANO Coro di Microonde II ezi n. 3: Generalità ugli amplificatori ineari Coro di aurea pecialitica in Ingegneria delle Telecomunicazi Circuiti attivi a microonde (Amplificatori) V in Z g
d y d u + u y des C(s) F(s) Esercizio 1 Si consideri lo schema di controllo riportato in figura:
 F(s) Esercizio 1 Si consideri lo schema di controllo riportato in figura:") Eercizio Si conideri lo chema di controllo riportato in figura: y de e C() d u u F() d y y Applicando le regole di algebra dei blocchi, calcolare le eguenti funzioni di traferimento: y() a) W y,dy() =
Eercizio Si conideri lo chema di controllo riportato in figura: y de e C() d u u F() d y y Applicando le regole di algebra dei blocchi, calcolare le eguenti funzioni di traferimento: y() a) W y,dy() =
Lezione 12. Regolatori PID
 Lezione 1 Regolatori PD Legge di controllo PD Conideriamo un regolatore che eercita un azione di controllo dipendente dall errore attravero la eguente legge: t ut = K et K e d K de t P + τ τ+ D. dt La
Lezione 1 Regolatori PD Legge di controllo PD Conideriamo un regolatore che eercita un azione di controllo dipendente dall errore attravero la eguente legge: t ut = K et K e d K de t P + τ τ+ D. dt La
3. Catene di Misura e Funzioni di Trasferimento
 3.. Generalità 3. Catene di Miura e Funzioni di Traferimento 3.. Generalità Il egnale che rappreenta la grandezza da miurare viene trattato in modo da poter eprimere quet ultima con uno o più valori numerici
3.. Generalità 3. Catene di Miura e Funzioni di Traferimento 3.. Generalità Il egnale che rappreenta la grandezza da miurare viene trattato in modo da poter eprimere quet ultima con uno o più valori numerici
Comportamento a regime dei sistemi in retroazione per segnali di ingresso canonici
 Comortamento a regime dei itemi in retroazione er egnali di ingreo anonii Errore a regime ed ineguimento Un obiettivo rimario nella rogettazione dei itemi di ontrollo è l ineguimento del egnale di riferimento
Comortamento a regime dei itemi in retroazione er egnali di ingreo anonii Errore a regime ed ineguimento Un obiettivo rimario nella rogettazione dei itemi di ontrollo è l ineguimento del egnale di riferimento
Lezione 2. Campionamento e Aliasing. F. Previdi - Controlli Automatici - Lez. 2 1
 Lezione 2. Campionamento e Aliaing F. Previdi - Controlli Automatici - Lez. 2 1 Schema della lezione 1. Introduzione 2. Il campionatore ideale 3. Traformata di un egnale campionato 4. Teorema del campionamento
Lezione 2. Campionamento e Aliaing F. Previdi - Controlli Automatici - Lez. 2 1 Schema della lezione 1. Introduzione 2. Il campionatore ideale 3. Traformata di un egnale campionato 4. Teorema del campionamento
Controlli automatici
 Controlli automatici Proetto del controllore nel dominio della frequenza Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioineneria Introduzione
Controlli automatici Proetto del controllore nel dominio della frequenza Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioineneria Introduzione
Controllore Processo. Le principali componenti del sistema sono: il rivelatore di errore, il controllore che ha il compito di trasformare il segnale
 CONTROLLORI DI TIO ID rincipi di funzionamento Il termine controllo definice l azione volta per portare e mantenere ad un valore prefiato un parametro fiico di un impianto o di un proceo (ad eempio, la
CONTROLLORI DI TIO ID rincipi di funzionamento Il termine controllo definice l azione volta per portare e mantenere ad un valore prefiato un parametro fiico di un impianto o di un proceo (ad eempio, la
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
Descrizione generale di Spice
 Decrizione generale di Spice SPIE A/D (Simulation Program with Integrated ircuit Emphai Analog/Digital) Ppice è un imulatore circuitale di uo generale, prodotto dalla ADENE Il imulatore Spice è uno dei
Decrizione generale di Spice SPIE A/D (Simulation Program with Integrated ircuit Emphai Analog/Digital) Ppice è un imulatore circuitale di uo generale, prodotto dalla ADENE Il imulatore Spice è uno dei
Trasformata di Laplace ESEMPI DI MODELLIZZAZIONE
 Traformata di Laplace ESEMPI DI MODELLIZZAZIONE Introduzione La traformata di Laplace i utilizza nel momento in cui è tata individuata la funzione di traferimento La F.d.T è una equazione differenziale
Traformata di Laplace ESEMPI DI MODELLIZZAZIONE Introduzione La traformata di Laplace i utilizza nel momento in cui è tata individuata la funzione di traferimento La F.d.T è una equazione differenziale
Capitolo IV L n-polo
 Capitolo IV L n-polo Abbiamo oervato che una qualiai rete, vita da due nodi, diventa, a tutti gli effetti eterni, un bipolo unico e queto è in qualche miura ovvio e abbiamo anche motrato come cotruire
Capitolo IV L n-polo Abbiamo oervato che una qualiai rete, vita da due nodi, diventa, a tutti gli effetti eterni, un bipolo unico e queto è in qualche miura ovvio e abbiamo anche motrato come cotruire
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
ELETTRONICA ANALOGICA INDUSTRIALE PARTE 4. Retroazione
 Retroazione Eetto della retroazione ul guadagno Riduzione della ditorione Impedenze di ingreo e di ucita Reti di retroazione Ripota in requenza Eetto della retroazione ui poli Margini di guadagno e di
Retroazione Eetto della retroazione ul guadagno Riduzione della ditorione Impedenze di ingreo e di ucita Reti di retroazione Ripota in requenza Eetto della retroazione ui poli Margini di guadagno e di
2 I METODI DI ANALISI DEI SISTEMI DI CONTROLLO AD ANELLO CHIUSO LINEARI 12
 COSO DI SISTEMI Sommario 1 I SISTEMI DI CONTOLLO...4 1.1 Introduzione...4 1.1.1 Sitemi di controllo ad anello aperto...5 1.1.2 Sitemi di controllo a previione...7 1.1.3 Sitemi di controllo ad anello chiuo
COSO DI SISTEMI Sommario 1 I SISTEMI DI CONTOLLO...4 1.1 Introduzione...4 1.1.1 Sitemi di controllo ad anello aperto...5 1.1.2 Sitemi di controllo a previione...7 1.1.3 Sitemi di controllo ad anello chiuo
K c s h. P(s) 1/K d. U(s) + Y(s)
 1/K d. U(s) + Y(s)") Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Controlli Automatici (AUT) - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a
 - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a") Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Esame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento) 16 Giugno 2008 (Bozza di soluzione)
 16 Giugno 2008 (Bozza di soluzione)") Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Considerazioni sulle specifiche.
 # SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
# SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
1 Generalità sui sistemi di controllo
 1 Generalità ui itemi di controllo Col termine proceo nell impiantitica chimica i intende un inieme di operazioni eeguite u una certa quantità di materia allo copo di modificarne in tutto o in parte alcune
1 Generalità ui itemi di controllo Col termine proceo nell impiantitica chimica i intende un inieme di operazioni eeguite u una certa quantità di materia allo copo di modificarne in tutto o in parte alcune
COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI 1/(1+T) E T/(1+T) T T. non compensata compensata H V
 E T/(1+T) T T. non compensata compensata H V") COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI /(+T) E T/(+T) vˆ = = G G vg c vg vˆ + T vˆ g + G g c vref T + vˆ H + T vˆ ref Z ref c out iˆ Z load out + T iˆ load T non compenata compenata H ( ) Gvd ( ) V
COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI /(+T) E T/(+T) vˆ = = G G vg c vg vˆ + T vˆ g + G g c vref T + vˆ H + T vˆ ref Z ref c out iˆ Z load out + T iˆ load T non compenata compenata H ( ) Gvd ( ) V
Esercizi di Controlli Automatici - 9 A.A. 2009/2010
 Eercizi di Controlli Automatici - 9 A.A. 2009/200 Eercizio. Dato il eguente chema, in cui gli amplificatori operazionali ono uppoti ideali, i calcoli la funzione di traferimento G() tra v in (t) e v out
Eercizi di Controlli Automatici - 9 A.A. 2009/200 Eercizio. Dato il eguente chema, in cui gli amplificatori operazionali ono uppoti ideali, i calcoli la funzione di traferimento G() tra v in (t) e v out
Errori di misura. è ragionevole assumere che una buona stima del valore vero sia la media
 Errori di miura Se lo trumento di miura è abbatanza enibile, la miura rietuta della tea grandezza fiica darà riultati diveri fra loro e fluttuanti in modo caratteritico. E l effetto di errori cauali, o
Errori di miura Se lo trumento di miura è abbatanza enibile, la miura rietuta della tea grandezza fiica darà riultati diveri fra loro e fluttuanti in modo caratteritico. E l effetto di errori cauali, o
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Le ipotesi di base che si utilizzano sono le stesse quattro già viste con riferimento al caso della flessione semplice e cioè:
 LEZIONI N 44 E 45 CALCOLO A ROTTURA DELLA SEZIONE PRESSOINFLESSA PROBLEMI DI VERIFICA La procedura di verifica dei pilatri di c.a., ottopoti a forzo normale e momento flettente, è baata ulla cotruzione
LEZIONI N 44 E 45 CALCOLO A ROTTURA DELLA SEZIONE PRESSOINFLESSA PROBLEMI DI VERIFICA La procedura di verifica dei pilatri di c.a., ottopoti a forzo normale e momento flettente, è baata ulla cotruzione
Corso Tecnologie dei Sistemi di Controllo. Controllo PID
 Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Esercitazione di Controlli Automatici 1 n 6
 4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Antitrasformata di Laplace PROCEDIMENTI DI ANTITRASFORMAZIONE
 Antitrasformata di Laplace PROCEDIMENTI DI ANTITRASFORMAZIONE") PROCEDIMENTI DI ANTITRASFORMAZIONE L'operazione di paaggio invero dal dominio della frequenza complea al dominio del tempo F() f(t) è detta antitraformata o traformazione invera di Laplace. Data una funzione
PROCEDIMENTI DI ANTITRASFORMAZIONE L'operazione di paaggio invero dal dominio della frequenza complea al dominio del tempo F() f(t) è detta antitraformata o traformazione invera di Laplace. Data una funzione
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 21 NOVEMBRE d 2 (t) r(t) e(t) y(t) C(s)G(s)
 r(t) e(t) y(t) C(s)G(s)") ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
Esercitazioni di Controlli Automatici L-A
 Eercitazioni di Controlli Automatici L-A Progetto di un regolatore Data le eguente funzione di traferimento G(): G() = + 0 3 + 7. 2 + 0.7 + () i richiede di progettare un regolatore R() che poto in cacata
Eercitazioni di Controlli Automatici L-A Progetto di un regolatore Data le eguente funzione di traferimento G(): G() = + 0 3 + 7. 2 + 0.7 + () i richiede di progettare un regolatore R() che poto in cacata
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 15 luglio 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 15 luglio 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
Circuito Simbolico. Trasformazione dei componenti
 Circuito Simbolico Principio di bae E poibile applicare a tutte le leggi matematiche che regolano un circuito la traformata di Laplace, in modo da ottenere un nuovo circuito con delle proprietà differenti.
Circuito Simbolico Principio di bae E poibile applicare a tutte le leggi matematiche che regolano un circuito la traformata di Laplace, in modo da ottenere un nuovo circuito con delle proprietà differenti.
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Esercitazione di Controlli Automatici 1 n 2. a.a. 2006/07
 6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
Teorema del Limite Centrale
 Teorema del Limite Centrale Una combinazione lineare W = a 1 X + a Y + a 3 Z +., di variabili aleatorie indipendenti X,Y,Z, ciacuna avente una legge di ditribuzione qualiai ma con valori attei comparabili
Teorema del Limite Centrale Una combinazione lineare W = a 1 X + a Y + a 3 Z +., di variabili aleatorie indipendenti X,Y,Z, ciacuna avente una legge di ditribuzione qualiai ma con valori attei comparabili
Messa a punto avanzata più semplice utilizzando Funzione Load Observer
 Mea a punto avanzata più emplice utilizzando Funzione Load Oberver EMEA Speed & Poition CE Team AUL 34 Copyright 0 Rockwell Automation, Inc. All right reerved. Co è l inerzia? Tutti comprendiamo il concetto
Mea a punto avanzata più emplice utilizzando Funzione Load Oberver EMEA Speed & Poition CE Team AUL 34 Copyright 0 Rockwell Automation, Inc. All right reerved. Co è l inerzia? Tutti comprendiamo il concetto
Slide del corso di. Controllo digitale
 Slide del coro di Controllo digitale Coro di Laurea in Ingegneria Informatica e dell Informazione Univerità di Siena, Dip. Ing. dell Informazione e Sc. Matematiche Parte III Sitemi a dati campionati Gianni
Slide del coro di Controllo digitale Coro di Laurea in Ingegneria Informatica e dell Informazione Univerità di Siena, Dip. Ing. dell Informazione e Sc. Matematiche Parte III Sitemi a dati campionati Gianni
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Fondamenti di Automatica Figura 1: Schema di centrifuga industriale: a) vista in assonometria b) vista frontale.
 vista in assonometria b) vista frontale.") Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
1. (solo nuovo ordinamento e diploma) Dato il sistema di controllo raffigurato, con
 Dato il sistema di controllo raffigurato, con") Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
Pertanto la funzione di trasferimento complessiva in catena aperta (open-loop) W(S) del sistema di controllo sarà data da:
 W(S) del sistema di controllo sarà data da:") M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
Sistemi di Controllo - Controlli Automatici (Parte B) Ingegneria Meccanica e Ingegneria del Veicolo
 Ingegneria Meccanica e Ingegneria del Veicolo") Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST
 ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Controllo di Azionamenti Elettrici. Lezione n 3. Caratteristiche e predisposizione dei regolatori PID
 Controllo di Azionamenti Elettrici Lezione n 3 Coro di Laurea in Ingegneria dell Automazione Facoltà di Ingegneria Univerità degli Studi di alermo Caratteritiche e predipoizione dei regolatori ID 1 Introduzione
Controllo di Azionamenti Elettrici Lezione n 3 Coro di Laurea in Ingegneria dell Automazione Facoltà di Ingegneria Univerità degli Studi di alermo Caratteritiche e predipoizione dei regolatori ID 1 Introduzione
Criterio di stabilità di Bode. tramite la risposta in frequenza viene indicata come condizione di innesco dell instabilità la
 Criterio di tabilità di Bode Sia dato un itema retroazionato con f.d.t. eprea F( H ( tramite la ripota in frequenza viene indicata come condizione di inneco dell intabilità la G ( j H ( j 0 cioè G ( j
Criterio di tabilità di Bode Sia dato un itema retroazionato con f.d.t. eprea F( H ( tramite la ripota in frequenza viene indicata come condizione di inneco dell intabilità la G ( j H ( j 0 cioè G ( j
I sistemi retroazionati. Per lo studio si può utilizzarne uno a reazione unitaria per rendere standard i risultati:
 I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
Regolazione e Controllo dei Sistemi Meccanici Figura 1: Schema di un montacarichi.
 Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Lezione 11. Progetto del controllore
 Lezione Progetto del controllore Specifiche di progetto Conideriamo nuovamente un itema di controllo in retroazione: d y + + + y () G() + + n Fig : Sitema di controllo Supporremo aegnata la funzione di
Lezione Progetto del controllore Specifiche di progetto Conideriamo nuovamente un itema di controllo in retroazione: d y + + + y () G() + + n Fig : Sitema di controllo Supporremo aegnata la funzione di
Diagramma circolare di un motore asincrono trifase
 Diagramma circolare di un motore aincrono trifae l diagramma circolare è un diagramma che permette di leggere tutte le grandezze del motore aincrono trifae (potenza rea, perdite nel ferro, coppia motrice,
Diagramma circolare di un motore aincrono trifae l diagramma circolare è un diagramma che permette di leggere tutte le grandezze del motore aincrono trifae (potenza rea, perdite nel ferro, coppia motrice,
Controllori PID. Fondamenti di Automatica Prof. Silvia Strada
 Controllori Fondamenti di Automatica rof. Silvia Strada efinizione controllori (ad azione roporzionale, ntegrale e erivativa) ono caratterizzati (idealmente) dalla legge di controllo: u ( t ) e( t ) e(
Controllori Fondamenti di Automatica rof. Silvia Strada efinizione controllori (ad azione roporzionale, ntegrale e erivativa) ono caratterizzati (idealmente) dalla legge di controllo: u ( t ) e( t ) e(
ẋ 2 = x 1 10x u y = x 1 + x 2 [
 Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
ESAME DI STATO DI LICEO SCIENTIFICO CORSO DI ORDINAMENTO 2003
 ESAME DI STATO DI LICEO SCIENTIFICO CORSO DI ORDINAMENTO 003 Il candidato riolva uno dei due problemi e 5 dei 0 queiti in cui i articola il quetionario. PROLEMA Si conideri un tetraedro regolare T di vertici
ESAME DI STATO DI LICEO SCIENTIFICO CORSO DI ORDINAMENTO 003 Il candidato riolva uno dei due problemi e 5 dei 0 queiti in cui i articola il quetionario. PROLEMA Si conideri un tetraedro regolare T di vertici
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
APPLICAZIONI DELLA TRASFORMATA DI LAPLACE
 C A P I T O L O 7 APPLICAZIONI DELLA TRASFORMATA DI LAPLACE 7. INTRODUZIONE Ora che è tata introdotta la traformata di Laplace, è poibile paare a eaminare che coa i può fare con ea. La traformata di Laplace
C A P I T O L O 7 APPLICAZIONI DELLA TRASFORMATA DI LAPLACE 7. INTRODUZIONE Ora che è tata introdotta la traformata di Laplace, è poibile paare a eaminare che coa i può fare con ea. La traformata di Laplace
Note su alcuni principi fondamentali di macroeconomia Versione parziale e provvisoria. Claudio Sardoni Sapienza Università di Roma
 Note u alcuni principi fondamentali di macroeconomia Verione parziale e provvioria Claudio Sardoni Sapienza Univerità di Roma Anno accademico 2010-2011 ii Indice Premea v I Il breve periodo 1 1 Il fluo
Note u alcuni principi fondamentali di macroeconomia Verione parziale e provvioria Claudio Sardoni Sapienza Univerità di Roma Anno accademico 2010-2011 ii Indice Premea v I Il breve periodo 1 1 Il fluo
Ottica. LEYBOLD Schede di fisica P5.6.2.1
 Ottica LEYBOLD Schede di fiica Velocità della luce Miura eeguita ediante ipuli luinoi di breve durata LEYBOLD Schede di fiica Deterinazione della velocità della luce nell aria eeguita ediante il tepo di
Ottica LEYBOLD Schede di fiica Velocità della luce Miura eeguita ediante ipuli luinoi di breve durata LEYBOLD Schede di fiica Deterinazione della velocità della luce nell aria eeguita ediante il tepo di
Esercizio no.1 soluzione a pag.5
 Edutecnica.it Eercizi ui filtri attivi Eercizio no. oluzione a pag. Si vuole realizzare un filtro paa-bao del I ordine con rapporto di amplificazione K0 e frequenza di taglio f T 0kHz uando la reitenza
Edutecnica.it Eercizi ui filtri attivi Eercizio no. oluzione a pag. Si vuole realizzare un filtro paa-bao del I ordine con rapporto di amplificazione K0 e frequenza di taglio f T 0kHz uando la reitenza
Differenziazione sistemi dinamici
 Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Fondamenti di Automatica
 Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
Sezioni in c.a. La flessione composta. Catania, 16 marzo 2004 Marco Muratore
 Sezioni in c.a. La fleione compota Catania, 16 marzo 004 arco uratore Per chi non c era 1. Compreione: verifica Tenioni ammiibili α cd Ac f 1.5 f yd A 0.7 σ ( A max c c n A ) Riultati comparabili per il
Sezioni in c.a. La fleione compota Catania, 16 marzo 004 arco uratore Per chi non c era 1. Compreione: verifica Tenioni ammiibili α cd Ac f 1.5 f yd A 0.7 σ ( A max c c n A ) Riultati comparabili per il
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 2014
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
coeff. della 1 colonna sono diversi da 0 il sistema è asintoticamente stabile;
 Sitemi Dinamici: Induttore: i = x, v = Lx Condenatore: i = Cx, v = x x = x x = p Maa: x =, dove x u = v M u = F x = x Ocillatore meccanico: x = (Kx M Dx + u), dove Pendolo: x = x x = g l in x + ml u k
Sitemi Dinamici: Induttore: i = x, v = Lx Condenatore: i = Cx, v = x x = x x = p Maa: x =, dove x u = v M u = F x = x Ocillatore meccanico: x = (Kx M Dx + u), dove Pendolo: x = x x = g l in x + ml u k
1 = (parabola unitaria) si determini l errore di regolazione a regime:
 si determini l errore di regolazione a regime:") A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
Controlli Automatici LB Scenari di Controllo
 Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 51 2932 Email: croi@dei.unibo.it UR: www-lar.dei.unibo.it/~croi 1. come vincoli ulla funzione d'anello 2. Scenari di controllo 3. inee guida per il progetto
Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 51 2932 Email: croi@dei.unibo.it UR: www-lar.dei.unibo.it/~croi 1. come vincoli ulla funzione d'anello 2. Scenari di controllo 3. inee guida per il progetto
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
Prova di verifica parziale N. 1 20 Ott 2008
 Prova di verifica parziale N. 1 20 Ott 2008 Eercizio 1 Nel uo tato naturale un campione di terreno umido di volume pari a 0.01 m 3 ha un peo di 18 kg. Lo teo campione eiccato in tufa ha un peo di 15.6
Prova di verifica parziale N. 1 20 Ott 2008 Eercizio 1 Nel uo tato naturale un campione di terreno umido di volume pari a 0.01 m 3 ha un peo di 18 kg. Lo teo campione eiccato in tufa ha un peo di 15.6
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
Sistemi di Regolazione
 Sitemi di Regolazione (vedi Marro Par. 6.9) (Vedi anche e. realizzati in Working Model 2D ed il file PD2.vi realizzato con LabView) Regolatori tandard Metodo di Ziegler - Nichol 3/9/2 G.U -FdA- U() = cotante
Sitemi di Regolazione (vedi Marro Par. 6.9) (Vedi anche e. realizzati in Working Model 2D ed il file PD2.vi realizzato con LabView) Regolatori tandard Metodo di Ziegler - Nichol 3/9/2 G.U -FdA- U() = cotante
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
La popolazione di gatti urbani sul territorio del Comune di Firenze
 Relazione di Teoria dei Sitemi La popolazione di gatti urbani ul territorio del Comune di Firenze Modelli per lo tudio ed il controllo Docente: Aleandro Caavola Studenti: Leonardo Profeti, Manfredi Toraldo,
Relazione di Teoria dei Sitemi La popolazione di gatti urbani ul territorio del Comune di Firenze Modelli per lo tudio ed il controllo Docente: Aleandro Caavola Studenti: Leonardo Profeti, Manfredi Toraldo,
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Paolo Rocco. Automatica
 Paolo Rocco Dipene ad uo degli tudenti del Politecnico di Milano per i cori da cinque crediti didattici Automatica Ingegneria Aeropaziale E vietato l uo commerciale di queto materiale Avvertenza Queta
Paolo Rocco Dipene ad uo degli tudenti del Politecnico di Milano per i cori da cinque crediti didattici Automatica Ingegneria Aeropaziale E vietato l uo commerciale di queto materiale Avvertenza Queta
Lezione 9. Schemi di controllo avanzati parte prima. F. Previdi - Controlli Automatici - Lez. 9 1
 Lezione 9. Schemi di controllo avanzati parte prima F. Previdi - Controlli Automatici - Lez. 9 Schema. Regolatori in anello aperto Controllo multivariabile:. Regolatori di diaccoppiamento 3. Controllo
Lezione 9. Schemi di controllo avanzati parte prima F. Previdi - Controlli Automatici - Lez. 9 Schema. Regolatori in anello aperto Controllo multivariabile:. Regolatori di diaccoppiamento 3. Controllo
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 febbraio 214 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 febbraio 214 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Lezione 11. Equilibrio dei mercati del credito e della moneta bancaria. domanda di credito delle imprese = offerta delle banche;
 Lezione 11. Equilibrio dei mercati del credito e della moneta bancaria L E d = L domanda di credito delle impree = offerta delle banche; M d H = M M domanda di moneta (legale e bancaria) delle famiglie
Lezione 11. Equilibrio dei mercati del credito e della moneta bancaria L E d = L domanda di credito delle impree = offerta delle banche; M d H = M M domanda di moneta (legale e bancaria) delle famiglie
UNIT 8 Soluzione del problema di controllo con Modelli Poveri 3 - Sintesi per tentativi degli asservimenti nel dominio della variabile complessa
 UNIT 8 Soluzione del problema di controllo con Modelli Poveri 3 - Sintesi per tentativi degli asservimenti nel dominio della variabile complessa Corso di Controlli Automatici Prof. Tommaso Leo Indice UNIT
UNIT 8 Soluzione del problema di controllo con Modelli Poveri 3 - Sintesi per tentativi degli asservimenti nel dominio della variabile complessa Corso di Controlli Automatici Prof. Tommaso Leo Indice UNIT
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1
Prova del 30 Giugno Si consideri il seguente sistema dinamico a tempo continuo: Esercizio 1 = + + U
 Prova del Giugno 4 Eercizio. Si conideri il eguente itema dinamico a tempo continuo: x () t α x() t + u() t x () t x() t u() t x () t x() t x() t ( + α) x() t + u() t yt () x() t.a Si calcoli la funzione
Prova del Giugno 4 Eercizio. Si conideri il eguente itema dinamico a tempo continuo: x () t α x() t + u() t x () t x() t u() t x () t x() t x() t ( + α) x() t + u() t yt () x() t.a Si calcoli la funzione
UNIVERSITÀ DEGLI STUDI DI TERAMO
 UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN TUTELA E BENESSERE ANIMALE Coro di : FISICA MEDICA A.A. 2015 /2016 Docente: Dott. Chiucchi Riccardo ail:rchiucchi@unite.it Medicina Veterinaria: CFU
UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN TUTELA E BENESSERE ANIMALE Coro di : FISICA MEDICA A.A. 2015 /2016 Docente: Dott. Chiucchi Riccardo ail:rchiucchi@unite.it Medicina Veterinaria: CFU
Lezioni di Ricerca Operativa 2 Dott. F. Carrabs
 Lezioni di Ricerca Operativa Dott. F. Carrab.. 009/00 Lezione in Laboratorio: - Eercizi di modellazione Lezione 7: Eempio: Invetimenti Un cliente affida ad un aenzia finanziaria un milione di euro da impieare
Lezioni di Ricerca Operativa Dott. F. Carrab.. 009/00 Lezione in Laboratorio: - Eercizi di modellazione Lezione 7: Eempio: Invetimenti Un cliente affida ad un aenzia finanziaria un milione di euro da impieare
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati
 Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Metodi Frequenziali per il Progetto di Controllori MIMO: Controllori Decentralizzati Ingegneria dell'automazione Corso di Sistemi di Controllo Multivariabile - Prof. F. Amato Versione 2.2 Ottobre 2012
Laboratorio di Algoritmi e Strutture Dati
 Il problema Laboratorio di Algoritmi e Strutture Dati Docenti: M. Goldwurm, S. Aguzzoli Appello del 5 Aprile 005 Progetto Recinti Conegna entro il Aprile 005 Si tudia la reitenza di alcune pecie di piante
Il problema Laboratorio di Algoritmi e Strutture Dati Docenti: M. Goldwurm, S. Aguzzoli Appello del 5 Aprile 005 Progetto Recinti Conegna entro il Aprile 005 Si tudia la reitenza di alcune pecie di piante
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Esempio 1 Si consideri la sezione di un solaio latero-cementizio (1 m) di caratteristiche geometriche:
 di caratteristiche geometriche:") Si riporta di eguito la rioluzione di alni eercizi riguardanti il calcolo del momento reitente e del dominio di preoleione di ezioni in cemento armato. In tutte le applicazioni ucceive i è utilizzato per
Si riporta di eguito la rioluzione di alni eercizi riguardanti il calcolo del momento reitente e del dominio di preoleione di ezioni in cemento armato. In tutte le applicazioni ucceive i è utilizzato per