LUOGO DELLE RADICI. Regole di Tracciamento (LD)
|
|
|
- Faustina Sara Lamberti
- 4 anni fa
- Visualizzazioni
Transcript
 Applicazioni ed Eempi Luogo")
1 LUOGO DELLE RADICI Introduzione Regole di Tracciamento (LD) Applicazioni ed Eempi Luogo Invero
2 Riferimenti Introduzione Capitolo 3 Teto di Bolzern Capitolo Lewi (download)... Richiami Modellitica Decrizione Prop. Strut. Analii Analii Sintei Prelim. Con. Avanzati Con. Standard
3 Controller Actuator Plant - K () G () A G () S G () Senor G ( ) K( ) G ( ) G( ) G ( ) G ( ) OL A S Pretazioni nel dominio del tempo OL Locazione dei poli in ciclo chiuo all interno del OLHP y lim y( t) lim y( )... t K v K p Poli dominanti (,,, ) n M T T p a polo y( ) 63% y y y max n 4 n co y % d e
4 Introduzione Una delle tecniche diponibili per l'analii e la intei dei itemi di controllo in retroazione è quella del metodo del Luogo delle Radici; tale tecnica fornice il luogo decritto nel piano compleo dai poli in ciclo chiuo in funzione del guadagno di anello. Il Luogo delle Radici tudia il comportamento dinamico del itema in ciclo chiuo partendo dalle caratteritiche della FdT in anello aperto Il Luogo delle Radici conidera itemi enza ritardo di anello (a meno di approimazione di Padè). Il Metodo del Luogo delle Radici è tradizionalmente complementare alle altre tecniche (p.e. la ripota in Frequenza) e i applica nella ua verione più comune a itemi SISO in quanto può eere viualizzato graficamente in forma qualitativa. Il Metodo del Luogo delle Radici è uato ia come Analii dei itemi di controllo, che di Sintei del controllore in anello chiuo




5 In 949 Evan howed how the characteritic equation could be olved by plotting the locu of point that have a imple relationhip with other nown point, that i, angle that um to 8. Evan developed a imple, equential proce, which engineer ued to generate etche in econd, and a pecialized protractor, which upported high accuracy in minute. Firt ued by North American Aviation deigner and taught at UCLA, the application and intruction of Evan new method pread rapidly to other companie and univeritie. Introduzione
6 Richiami Parametri della ripota temporale: u( t) y ( t) RAMP SS lim G ( ) OL V STEP SS G K lim OL ( ) p M p e, T T a n =, d ln 3 n n r - G () comp u d G() y R n n G () en M M e R p G( j ).77 G( j) BW Il controllore (compenatore) è reponabile della compenazione dei requiiti del proceo in termini di ripota temporale, quindi di locazione dei poli in anello chiuo
7 Definizioni Conideriamo un itema lineare in retroazione: r - H() u d G() y K( ) H( ) L( ) K( ) G( ) H( ) G( ) H( ) G( ) G( ) y( ) r( ) d( ) H( ) G( ) G( ) H( ) r - u d H() G() y G () y( ) [ d( ) r( )] H( ) G( ) Equazione Caratteritica in Ciclo Chiuo: D( ) H( ) G( ) L( ) Funzione di Traferimento di Anello: L( ) G ( ) K( ) G( ) H( ) G( ) OL
8 Definizioni Richiami: un luogo geometrico (in D per emplicità), o più emplicemente un luogo, è l'inieme di tutti e oli i punti del piano che godono di una determinata proprietà. Eempio: L'ellie è il luogo geometrico dei punti del piano per cui è cotante la omma delle ditanze da due punti fii detti fuochi Definizione di Luogo delle Radici: Per un itema in retroazione i definice luogo delle radici, il luogo decritto nel piano compleo dalle radici dell'equazione caratteritica D() =, al variare del parametro reale da - a + D( ) H( ) G( ) G ( ) : G ( ), G ( ) G ( ) H ( ) OL Ovvero: Il Luogo delle Radici decrive il movimento dei poli in ciclo chiuo al variare del guadagno di anello. Si definice Luogo Diretto (LD) quando il guadagno varia da < < Si definice Luogo Invero (LI) quando il guadagno varia da - < < Il guadagno non è neceariamente il guadagno tatico del itema, come quello uato tradizionalemente la ripota in frequenza m ( z ) z j N () j j G ( ), m n; OL n STAT n D () ( p ) p i i OL OL m i j i
9 Eempi Eempio: G () < < G ( ) G ( ) OL CL Il luogo delle radici (diretto) i calcola riolvendo per, al variare di da a +, Il polo in ciclo chiuo vale = ( - ) e il itema è aintoticamente tabile per tutti i > ; y=/(-)
10 Eempi Eempio: G () ( )( ) G ( ) G ( ) OL CL ( )( ) Vogliamo trovare il luogo dei punti del piano compleo (con < < ) per cui: Il luogo delle radici traccia ul piano compleo i poli in ciclo chiuo al variare del guadagno, in queto cao:, 4( ), [, ). = (non reazionato) =, = -. = = -, = 3. = 9/4 = = -/ 4. > 9/4 i poli di anello chiuo diventano complei e coniugati con parte reale = -.5 e parte immaginaria che, j 4 9



11 Eempi Si deduce coì che per > il itema in ciclo chiuo è aintoticamente Stabile y=/(^+-)
12 Eempi Commenti: Se i deidera una ripota in ciclo chiuo enza ocillazioni, deve eere: < < 9/4 Se i deidera una ripota tranitoria con una ovraelongazione del % i ha: MP ( / ). e rad / ec n n Eendo co =, i ha: 4 9 n ( )( )


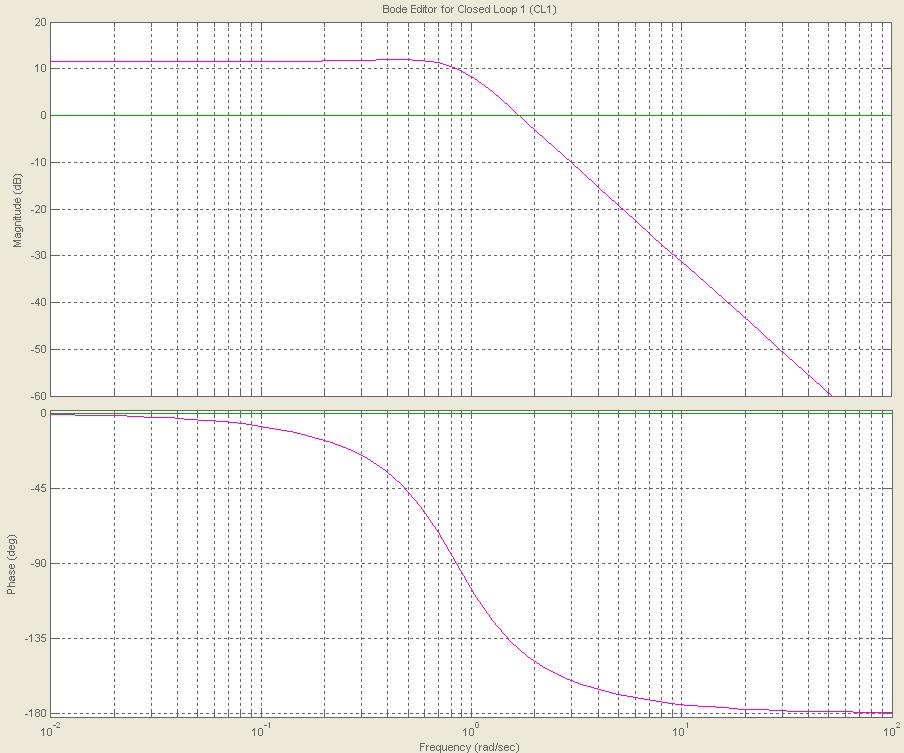
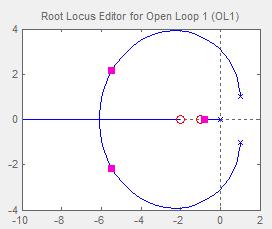
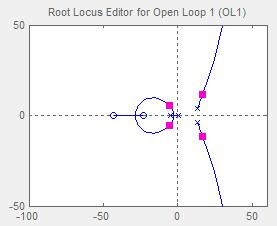
13 Eempi w BW rad/ec Eempio con SISOTOOL
14 Regole di Tracciamento (Luogo Diretto) Il Luogo delle Radici è tracciabile mediante auilio numerico, baato u un certo numero di regole, che ne permette anche il tracciamento grafico qualitativo m j n i D(, ) G( ) H( ) G( ) H( ) m j n i ( z ) ( z ) j ( p ) j ( p ) i i m Luogo Diretto ( > ) m n m n ( z ) ( p ) j i j i j i j i ( z ) ( p ) ( ) j j i n i G( ) H( ) j n i ( z ) ( p ) ( ) ( intero) m j i Un punto appartiene al luogo e e olo e la omma algebrica degli angoli ottintei dai poli e dagli zeri è un multiplo dipari di p ed il rapporto dei moduli è pari a / P( ) P( ) P( ) Q( ) Q( ) P( ) Q( )
15 Regole di Tracciamento (Luogo Diretto) Regola No. : Se =, I poli in ciclo aperto e ciclo chiuo coincidono. Quindi il luogo parte dai poli della funzione di traferimento in ciclo aperto. G( ) H( ) m j n i ( z ) j ( p ) i m j j G( ) H( ) p n i i ( z ) ( p ) i G( ) H( ) ( ) ( 4) G( ) H( ) ( ) ( 8) = = y=(+)/((-)*(+4)) Il numero dei poli in ciclo chiuo è empre uguale al numero dei poli in ciclo aperto quando il guadagno varia da a + N ( ) N ( ) ol D ( ) N ( ) D ( ) ol ol ol ol
16 Regole di Tracciamento (Luogo Diretto) Regola No. : Per =>, i poli in ciclo chiuo tendono a: Gli zeri ad anello aperto infinito G( ) H( ) m j j ( ) ( ) n G H i ( z ) ( p ) i z j Data una FdT in Anello Aperto con n poli e m zeri (con n m), e, m poli a ciclo chiuo tendono agli m zeri di anello aperto e i retanti n-m poli a ciclo chiuo = = = = = y=(^+*+6)/(^5+*^4+*^3+*^+3*+6)
.")
17 Regole di Tracciamento (Luogo Diretto) Regola No. 3: Il luogo delle radici ha un numero di rami pari al numero n dei poli in anello aperto (ogni polo in anello chiuo che i muove nel piano compleo definice un ramo del luogo). G( ) H( ) ( )( 3)( 4) Il luogo delle radici preenta tre rami; per = il luogo delle radici parte dai tre punti -, - 3, -4 (Regola ); mentre per due rami vanno all'infinito e il terzo va a -, dove i trova lo zero di anello aperto (Regola ). 3 y=tf([,],[,9,6,4])

18 Regole di Tracciamento (Luogo Diretto) Regola No. 4: Il luogo delle radici è immetrico ripetto all ae reale, in quanto decrive l andamento di un et di numeri autoconiugati G( ) H( ) ( )( 3)( 4) Nota: Tracciamento approimato
19 Regole di Tracciamento (Luogo Diretto) Regola No. 5: I poli in ciclo chiuo (n m) che tendono all infinito eguono direzioni aintotiche quando. Gli aintoti hanno l origine in comune x a e formano con l ae reale un angolo pari a y ar. La omma dei poli (e in ecceo di o uperiore) rimane cotante all aumentare di. Il baricentro del Luogo è dato da x b. x a i n p m i j n m z j a (r ), r,,,..., n m n m 3: p/3, p, 5p/3 : p. : p/, 3p/ 4: p/4, 3p/4, 5p/4, 7p/4 x b n i n p ; n m i NOTA: e vi ono o più aintoti, la omma dei poli è cotante al variare di K!!!!
 4 ( )( 3)( 4) G( ) H( ) ( )( ) x a i n")
)")
20 Regole di Tracciamento (Luogo Diretto) G ( ) H ( ) 4 ( )( 3)( 4) G( ) H( ) ( )( ) x a i n m p z i j j 3 4 n m 3 3, a a 4 x a 4 4, ,, a a a y=tf([,4],conv([ ],[ -]))
 ( p ) j i j i j i j i ( ) ( intero) G( ) H( ) y=(+)/(^+*) ( ) Regola No.")
21 Regole di Tracciamento (Luogo Diretto) Regola No. 6: Lungo l ae reale, il luogo lacia alla propria detra un numero dipari di ingolarità (poli e zeri in anello aperto). m n m n ( z ) ( p ) j i j i j i j i ( ) ( intero) G( ) H( ) y=(+)/(^+*) ( ) Regola No. 7: Il luogo lacia l ae reale e/o rientra ull ae reale con pendenza 9, in punti predefiniti e calcolati mediante la relazione (per due rami): d d Nota: Il calcolo di tale relazione può portare a divere oluzioni, alcune anche non accettabili poiché i punti coì ricavati non appartengono al luogo delle radici diretto (ma a quello invero, vedi dopo).
22 Regole di Tracciamento (Luogo Diretto) 4 G( ) H( ) G( ) H( ) ( )( ) ( )( ) 4 d d ( 4) ( 4) 3 3 (3 )( 4) y=(+4)/(^3-^) y=(+)/(^) G( ) H( ) Per la regola 6 però, olo 3 appartiene al luogo delle radici e riulta eere un punto di ucita d d
23 Regole di Tracciamento (Luogo Diretto) Regola No. 8: L angolo di partenza da una coppia di poli complei e coniugati e l angolo di arrivo ad una coppia di zeri complei e coniugati i calcolano mediante le eguenti epreioni: n ( ) ( p p ) ( p z ) p i j i j i m ( ) ( z z ) ( z p ) z j i j i j I poli e gli zeri di anello aperto rappreentano punti di partenza e di arrivo dei rami del luogo delle radici; nel cao in cui tali ingolarità iano reali, i rami vi partono o arrivano lungo l'ae reale ma e invece i è in preenza di poli o zeri complei e coniugati, può eere importante conocere l'angolo di partenza o arrivo. L appartenenza al luogo delle radici richiede come è noto: m n m n H( ) G( ) ( z ) ( p ) ( ) ( intero) j j i i
 e")

24 Regole di Tracciamento (Luogo Diretto) Conideriamo un punto nell'intorno infiniteimo della ingolarità (polo o zero) e appartenente al luogo delle radici, fruttando la relazione di fae e tenendo preente che, otto quete ipotei, la tangente i può "confondere" con l'angolo, i ha:
 ( ) ( ) d 4 ( ) d ( ) 3.73. 6 8 y=(+)/(^++)")
25 Regole di Tracciamento (Luogo Diretto) G( ) H( ) OL 3 OL p j, 5 j.866, z,, 6 p 6 3 T () ( ) ( ) d 4 ( ) d ( ) y=(+)/(^++)
? Im 5 Im 5 R z 5 9 5 -.69 R ( ).3466.")
26 Regole di Tracciamento (Luogo Diretto) OL OL G( ) H( ) z, 5 j.866, p,,, ( )? Im 5 Im 5 R z R ( ) d d, T () ( ) ( ) ( )

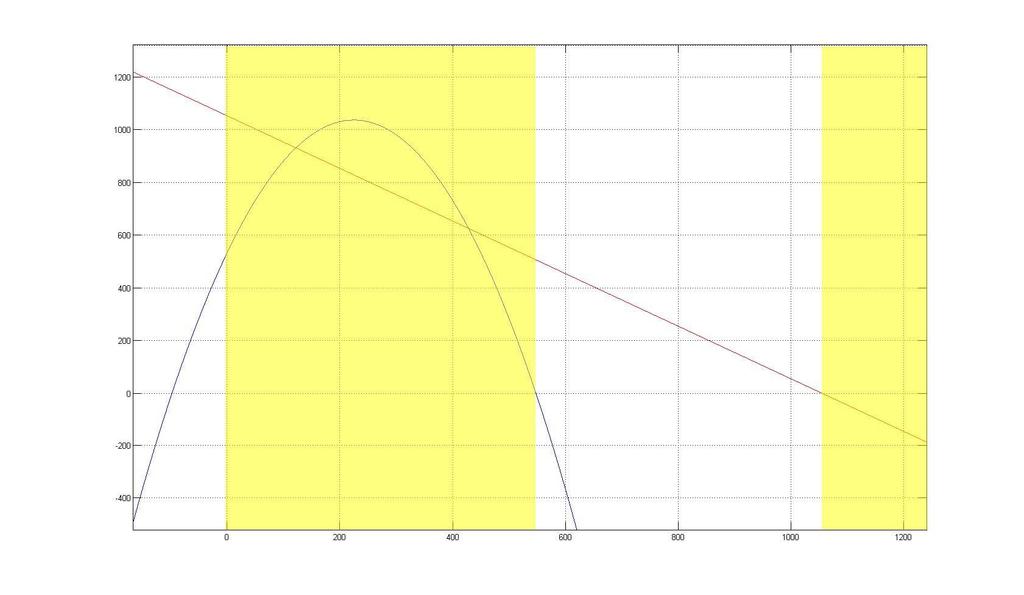
27 Regole di Tracciamento (Luogo Diretto) Regola No. 9: Il valore del guadagno per cui il luogo delle radici attravera l ae immaginario i trova uando il criterio di Routh. Queta regola è di etrema importanza perché determina uno o più critici, cioè i valori maimo/minimo del guadagno prima che il itema divenga intabile o neceario per la tabilità del itema teo (a ciclo chiuo). G( ) H( ) G( ) H( ) CR =, Sitema in Ciclo Chiuo Aintoticamente Stabile per > CR =

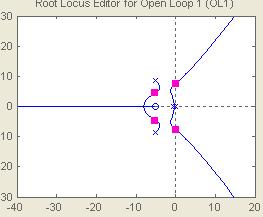
28 Regole di Tracciamento (Luogo Diretto) G( ) H( ) OL z, p j OL, d d.36, 3.36 G( ) H( ) ( ) K CR = y=(+)/(^-*+) iotool
29 Regole di Tracciamento (Luogo Diretto) G( ) H( ) OL z, p j OL, d d.36, 3.36 G( ) H( ) ( ) CR = ma, in queto cao, il itema in ciclo chiuo è aintoticamente tabile per valori del guadagni inferiori a quello critico. y=(-)/(^-*+) iotool


 G( ), H( )")
30 Regole di Tracciamento (Luogo Diretto) Regola No. : Gli zeri in anello aperto attraggono i rami del luogo, i poli in anello aperto repingono i rami del luogo. Queta regola riulta fondamentale nel progetto e nella fae di intei in quanto fornice indicazioni ul numero e locazione delle ingolarità del controllore K() G( ), H( ) H () G( ) H( ) H()
31 Sommario, >. Regole di Tracciamento (Luogo Diretto) Nota: per il tracciamento del Luogo delle Radici, non fa differenza la natura di, G(), H(). Ovvero poono eere parte del proceo, parte del controllore, in catena diretta, oppure in catena di retroazione
32 ( )( ) G () OL ( )( ) Eempi e Applicazioni. Singolarità: Zeri +, +; Poli -, -. Non vi ono Aintoti 3. Vi ono rami che i ditaccano dall ae Reale e poi rientrano d d ( 3 ) 6, 4. Eite un CR, calcolabile con il Criterio di Routh D( ) ( ) 3( ) ( ) y=((-)*(-))/(^+3*+) ( ) 3( ) ( ) CR = ; < CR
33 Eempi e Applicazioni ( )( ) G () OL ( )( ). Singolarità: Zeri +, -; Poli -, -5+-j8.66, ci ono 3 rami. No. Aintoti = 3. Calcolo Angolo di partenza dai poli complei e coniugati
34 Eempi e Applicazioni 4. Calcolo Punti di Ingreo/Ucita G ( ) OL d d ( )( ) ( )( ).3,.5 5. Calcolo critico, < CR per la tabilità aintotica in anello chiuo 3 D( ) ( ) ( ) 3 3 < CR = 5 y=((-)*(+))/((^+*+)*(+))
( 7)( 3 3),.59 3 4 5 3p 9 8.95 5 6.89 + 3.9 44. 6")
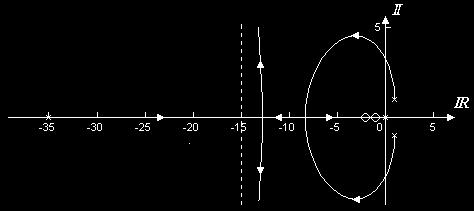
35 Eempi e Applicazioni G 5 () OL ( )( 7)( 3 3). Zeri: -5; Poli:, +, -7, -.5+-j.866, Il Luogo ha 5 rami. No. Aintoti = 4 x a = = 5 4 a a a a 3 = 3 5 7,,, Eite punto di ucita 4. Angolo di Ucita dai Poli Complei d d 5 ( )( 7)( 3 3), p

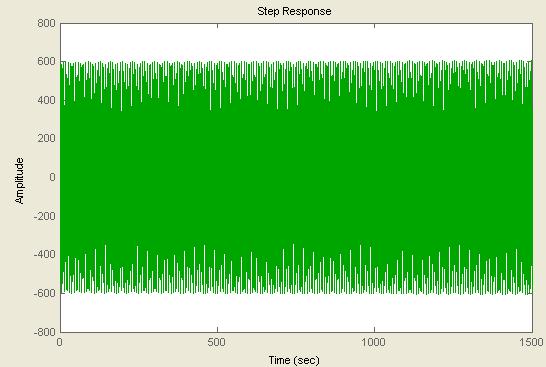
36 Eempi e Applicazioni Il itema in ciclo chiuo è empre INSTABILE y=(+5)/((^-)*(+7)*(^+3*+3))
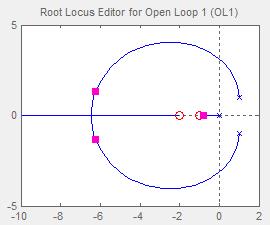
37 Eempi e Applicazioni G OL () ( 5) (.5)( ). Zeri: -5; Poli:, -.5, -5+-j8.66: Il Luogo ha 5 rami. No. Aintoti = 3 x a ,, 3 3 a a a Eitono punto di ucita ed punto di ingreo d d 5 (.5)( ) -8.4, -.5
 ( 5) (.5)( ) D 4 3 ( ).5 5 (5 ) 5 4 5 5 3.5 5 5.5.5 (5.5 )(5 ) 55.")
38 Eempi e Applicazioni 4. Angolo di Ucita dai Poli Complei Calcolo critico con Routh D ( ) ( 5) (.5)( ) D 4 3 ( ).5 5 (5 ) (5.5 )(5 ) 55.5 (5.5 ) 5 5
39 Eempi e Applicazioni CR =
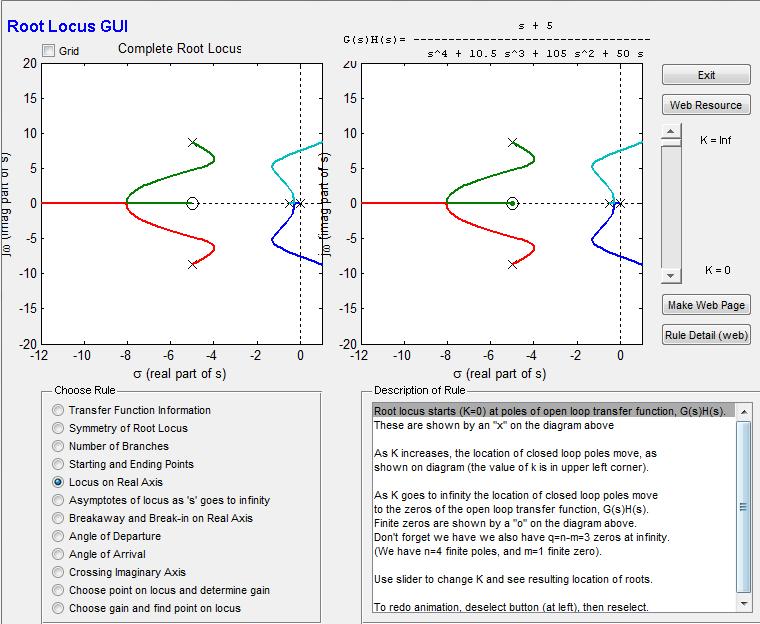
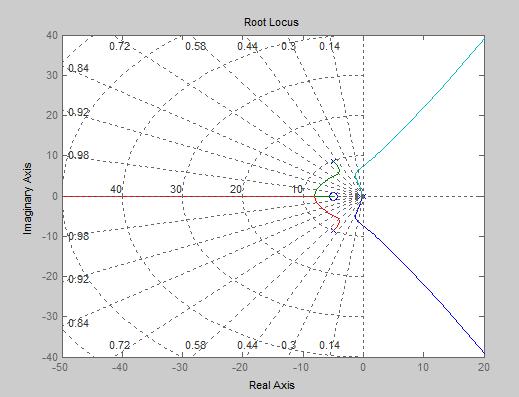
40 y=(+5)/(^4+.5*^3+5*^+5*) Eempi e Applicazioni
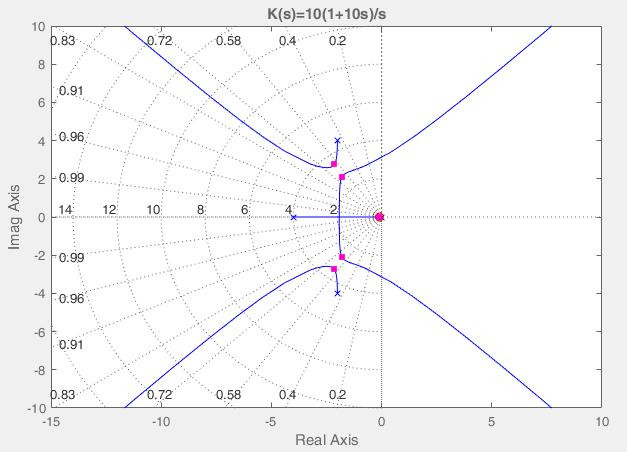
41 Eempi ed Applicazioni Eempio di Sintei Dato il itema G(), progettare un controllore tale che:. L errore a regime al gradino unitario ia =. La ripota tranitoria ia dominata da un comportamento del primo ordine G( ) ; p j, Conideriamo una variazione di guadagno. Il luogo delle Radici per > è dato da: G ( ) K( ) G( ) OL E neceario introdurre un polo all origine per oddifare il requiito di ripota a regime. Un controllore poibile è quindi: G ( ) K( ) G( ) OL K ()
.")
 ( ) ( ) D z 3 ( ) ( ) CN di Routh non è oddifatta ed il itema in ciclo")
42 Eempi ed Applicazioni Per attirare i rami intabili nel emipiano di parte reale negativa, occorre introdurre uno ZERO (regola ). Conideriamo un controllore P I: K() ( z ) G ( ) K( ) G( ) OL ( z ) D z ( ) ( ) ( ) D z 3 ( ) ( ) CN di Routh non è oddifatta ed il itema in ciclo chiuo è empre intabile
43 Eempi ed Applicazioni La regola uggerice l inerimento di almeno un ulteriore zero per "attrarre" il luogo delle radici nel emipiano di parte reale negativa Un poibile controllore è un Controllore ( z )( z ) indutriale di nome P-I-D ed ha la forma K() generale (formalmente non cauale): ( z )( z ) G ( ) K( ) G( ) OL D z z ( ) ( ) ( )( ) 3 z z z z ( ) [ ( )] +(z+z) - zz (*) zz (*) ( )[ ( z z )] z z ( )
44 Eempi ed Applicazioni Il controllore celto, tabilizza il itema in ciclo chiuo per valori del guadagno maggiori del cr, ma è un controllore non cauale (due zeri ed un polo). Riulta neceario aggiungere almeno un polo, Fuori Banda, in modo da influenzare il meno poibile la tabilità in ciclo chiuo del itema. L aggiunta di poli fuori dalla banda paante ovvero a frequenza molto maggiore di w BW, non influenza in modo otanziale la ripota in frequenza (almeno una decade al di là del polo più veloce) K( ) ( z )( z ( P) ( )( ) ( )( ) K( ) K( ) G( ) P P ( ) ( )( ) ) Uo di SISOTOOL


45 Eempi ed Applicazioni No Pole Pole = - y=/(^-*+) Pole = -35 Pole = -
46 Luogo delle Radici Invero Il luogo delle radici invero fornice l'andamento dei poli a ciclo chiuo quando la cotante di guadagno è negativa o quando, pur eendo poitiva, i è in preenza di retroazione poitiva. Il tracciamento del Luogo egue le tee regole, con variazioni riguardanti La componente di fae dell equazione caratteritica. D ( ) G ( ) H ( ) G ( ) CL OL G( ) H( ) m j n i ( z ) j ( p ) i, j m n ( z ) ( p ) ( =,,,...) i j i

47 Tracciamento del Luogo Invero ar n,,,,, n m
48 Tracciamento del Luogo Invero d d n ( p p ) ( p z ) p i j i j i m ( z z ) ( z p ) z j i j i j m n
 H ( ) OL d d =, Aintoticamente tabile in ciclo chiuo per tutti i < cr =")
49 Eempi e Applicazioni (LI) G () OL y=/(^++) > < Aintoticamente tabile in ciclo chiuo per tutti i poitivi G ( ) H ( ) OL d d =, Aintoticamente tabile in ciclo chiuo per tutti i < cr =

50 Eempi e Applicazioni (LI) G () OL ( ) y=/(^3+*^+*) > < x a = 3 = 3 Aintoticamente tabile in ciclo chiuo per tutti i < cr CR 4 CR Intabile in ciclo chiuo per tutti i
 ( )( ) y=(-)/(^+3*+) Il controllore deve")

51 Eempi Eempio di Sintei: Dato il itema G(), determinare un controllore K() tale che l errore a regime al gradino unitario ia = G () ( )( ) y=(-)/(^+3*+) Il controllore deve introdurre un integratore in modo che la FdT in anello aperto ia di tipo. Il itema in ciclo chiuo deve eere aintoticamente tabile Il itema è a fae non minima (zero intabile)
52 Eempi Un controllore proporzionale garantice in errore al gradino finito per < cr Scelta iniziale del controllore in modo che la FdT di K () anello ia di tipo : G OL () ( ) ( )( ) G CL () G () ( ) OL 3 ( ) OL 3 ( ) G Il Luogo delle Radici Diretto, K > motra che il itema in anello chiuo è empre intabile (La CN del Criterio di Routh non è infatti oddifatta). Luogo delle Radici Diretto, K >

53 Eempi Luogo delle Radici Invero, K < Eite un Intervallo di Stabilità per Il guadagno 3.5

54 Eempi Uo del luogo delle radici invero. Il valore critico di K per la tabilità in ciclo chiuo è = -.5 La FdT in ciclo aperto è di tipo quindi il minimo errore alla rampa è dato dal maimo valore del guadagno che mantiene la tabilità aintotica La verifica può eere fatta con iotool, oppure calcolando l errore minimo mediante il teorema del valore finale. lim ( ) ( )( ) ( ) lim ( )( ) ramp ramp


 K( ) ;, z.")
55 Eempi Per avere un errore nullo alla rampa, K()G() deve eere di tipo. Aggiungiamo uno zero per attrarre i due rami intabili. ( z) K( ) ;, z.5( ) K ()
 ( 4)( 4 ). 4 aintoti. Origine degli aintoti = - 3.")
56 Eempi G () ( 4)( 4 ) Requiiti di progetto:. Errore alla rampa nullo. Maima ovraelongazione = % 3. Tempo di aetamento più piccolo poibile G ol () ( 4)( 4 ). 4 aintoti. Origine degli aintoti = - 3. Brea out point =- d G() d ( ); ( )
 ( 4)( 4 ) I rami intabili")

57 Eempi Il requiito di regime richiede una FdT di anello di tipo G ol () ( 4)( 4 ) I rami intabili devono eere attratti nel emipiano di parte reale negativa -> il controllore deve avere degli zeri. Siotool
58 Eempi
.5 G ( ).45 ().65")
59 Eempi Dinamica biciclo (Steering) ydeltaphi=(.45*(+.5))/(^-.65) m a b h v 8Kg.4 m.m.8 m 5 m / ec = 9 G () Dv mv h () b b () J mgh v () av G () a () bh g h J D Retroazione Proporzionale ( ) ( ).4 CRIT mh mah ( ).5 G ( ).45 ().65
 ( v ) ( v ) ( v ) T ( v ) ( v in bg co ) mac in bg v")
60 Eempi Significato del guadagno nel luogo delle radici Dhv mhv J ( t) ( t) mgh ( t) b b CR gb v Al diminuire della velocità, occorre un guadagno maggiore per la tabilità in ciclo chiuo. Per valori inferiori al guadagno critico il itema in ciclo chiuo è intabile Importanza del manubrio nella dinamica e nella tabilità 9 P P r 3 (9 ) ( v ) ( v ) ( v ) T ( v ) ( v in bg co ) mac in bg v in b bg co Gli angoli f e d cambiano a caua della preenza del manubrio in funzione di l Velocità di autoallineamento Velocità critica per la tabilità v bg cot C v v C
 mg ( bh in ac co ) J( v in bg co ) Dv b macj( v in bg co ) b( hv acg) acj( v in bg co")
61 Eempi ( ) M Cv ( K K v ) T( ) ( ) A A BT B T ( v ) T ( v ) y y A A B B B G () B T A A Dv g B J( v in bg co ) mg ( bh in ac co ) J( v in bg co ) Dv b macj( v in bg co ) b( hv acg) acj( v in bg co )
 () T")
62 Eempi () T () () T ()
 ( ) v ( ) ( ) b m 8Kg a.4 m b. m h.8 m v 5 m / ec 8 Km / h ( ).534 4.4 4 3 () (.")
63 Eempi Dinamica biciclo (maneuvering, trac following) La dinamica di manovra riguarda lo cotamento da una traiettoria rettilinea lungo l ae. Per piccoli movimenti tali per cui il modello lineare è valido, i ha: v ( ) ( ) v ( ) ( ) b m 8Kg a.4 m b. m h.8 m v 5 m / ec 8 Km / h ( ) () ( ) T
64 Eempi ( ) ( ) () ( ) T ( 43.49)( 3.49).46 (.38)( 4.744)( ) ( ) () ( ) T ( ).534 ( 3.396)( 3.396) ( ) ( 43.49)( 3.49) ( ) ( ) () ( ) T ( 3.396)( 3.396) 4.4 (.38)( 4.744)( ) j() T() () T () () () h() () T () d()
 5.7 T () ( 3.457 )(.8 )(.49.")
65 Eempi Forma di Bode ( ) (.944 )(.944 ) 5.7 T () ( )(.8 )( )
66 Eempi ydeltaphi=(.45*(+.5))/(^-.65) ytphi=(-.46*^-9.387*-4.7)/(^4-.*^3+7.37*^+886.4*-79.) ytdelta=(5.65*^-58.4)/(^4-.*^3+7.37*^+886.4*-79.) yteta=(4.4*(5.65*^-58.4))/(^*(^4-.*^3+7.37*^+886.4*-79.))




67 Eempi Commenti Sitema altamente intabile Controllo manuale relativamente emplice con training minimo Implementazione automatica/robotica richiede una intei complea
 Caratteritiche Generali:.")



68 Eempi Analii Modello Antenna (Eempio 7 m radio telecopio, Goldtone, Mojave deert, California) Caratteritiche Generali:. La preciione di forma del riflettore di 7 m di diametro deve eere di cm u tutta la uperficie di 3,85 metri quadrati.. Antenna e truttura di controllo per I due canali di azimut ed elevazione ha un peo,7 tonnellate metriche. 3. Frequenza di operazione Ka-Band = 3 GHz Preciioni richiete (approx.):. Azimut <.5 arcec =.38* -4 gradi. Elevazione <.5 arcec = 4* -4 gradi Modello generato per il controllo (tra encoder di motore e velocità di rotazione): 8 tati, ingreo, ucita A (8,8), B (8,), C (,8)
 () u")
69 Eempi G () () u ()
 G")
70 Eempi Approimazione Singolo Integratore (modello in velocità) G () () u()

71 Criteri Generali di Sintei Il Luogo delle Radici, nella Sintei, fa riferimento a requiiti di progetto ulla ripota tranitoria generata dai poli dominanti in anello chiuo. I requiiti di ripota tranitoria i tralano naturalmente nella locazione appropriata dei poli in ciclo chiuo La locazione dei poli dominanti può eere definita in bae a pecifiche dei progetto
 3 4 Come variano i poli del itema G() al variare di?")
72 Luogo delle Radici non - Standard Coa uccede nel cao in cui i vuole tracciare l andamento dei poli in anello chiuo al variare di un parametro che non è il guadagno di anello? Eempio: G () 3 4 Come variano i poli del itema G() al variare di? Tracciare il luogo delle radici per il nuovo itema Eq G ( ) G Eq ol () ol 3 4
 m c c F x [ N ec] [ m] F x [ N] [ m]")

73 Luogo delle Radici non - Standard F x ( ) F () m c c F x [ N ec] [ m] F x [ N] [ m] Dati forniti: m = ; =. Requiito di progetto: c.75 c c c cg ( ) G () p c c j,.75 c.5
.5 Il ricaldamento della molla garantice le pretazioni dello morzatore. Il raffreddamento no. Soluzione:.")
74 Luogo delle Radici non - Standard Supplier della molla dichiara che il materiale è oggetto a variazioni dovute alla temperatura. In particolare i ha che: T.9, T. Poiamo uare il Luogo delle Radici per valutare il progetto dello morzatore? nom nom.5 G ( ).5 Il ricaldamento della molla garantice le pretazioni dello morzatore. Il raffreddamento no. Soluzione:. Retrizione uo in funzione della temperatura. Uo normale ma pretazioni degradate alla diminzione della temperatura 3. Riprogettazione completa

75 Luogo delle Radici non - Standard

76 Dialettica
Il Luogo delle Radici
 Il Luogo delle Radici Il luogo delle radici è un procedimento, otanzialmente grafico, che permette di analizzare come varia il poizionamento dei poli di un itema di controllo in retroazione al variare
Il Luogo delle Radici Il luogo delle radici è un procedimento, otanzialmente grafico, che permette di analizzare come varia il poizionamento dei poli di un itema di controllo in retroazione al variare
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c ; P 1 1( ( + 4 ; P ( ( + ( + 3 ;
1 = (parabola unitaria) si determini l errore di regolazione a regime:
 si determini l errore di regolazione a regime:") A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
A - Tet d ingreo alla Prova Scritta di Controlli Automatici A del Ottobre 00 ( + ) ( ) + ) Dato un itema dinamico Σ con funzione di traferimento T() crivere i modi di Σ : ( + ) + 9 t { modi di Σ } {, tt,,
ẋ 2 = x 1 10x u y = x 1 + x 2 [
 Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
Soluzione dell appello del 16 luglio 212 1. Si conideri il itema lineare decritto dalle eguenti equazioni: 1.1 Trovare le condizioni iniziali x() = ẋ 1 = x 1 ẋ 2 = x 1 1x 2 1u = x 1 x 2 [ x1, x 2, aociato
Esame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A
 Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
Eame di Fondamenti di Automatica Ingegneria Elettronica Day Month Year Compito A A Cognome: Nome: Matricola: Mail: 1. Dato il itema di controllo raffigurato, con C( K c 2 ; P 1 1( ( + 4 ; P 2 ( ( + 1 (
Compito di Fondamenti di Automatica settembre 2006
 Compito di Fondamenti di Automatica ettembre 2006 Eercizio 1. Si conideri lo chema di figura (operazionale ideale, eccetto per il guadagno che puó eere definito da una G(), reitenze uguali, condenatori
Compito di Fondamenti di Automatica ettembre 2006 Eercizio 1. Si conideri lo chema di figura (operazionale ideale, eccetto per il guadagno che puó eere definito da una G(), reitenze uguali, condenatori
Esercitazione di Controlli Automatici 1 n 2. a.a. 2006/07
 6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
6 marzo 007 Eercitazione di Controlli Automatici n a.a. 006/07 Riferendoi al itema di controllo della temperatura in un locale di piccole dimenioni dicuo nella eercitazione precedente, e di eguito riportato:.
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST
 ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
ANALISI DI SISTEMI IN RETROAZIONE TEOREMA DI NYQUIST PROPRIETÀ DEI SISTEMI IN RETROAZIONE U E G () H () Si fa riferimento ad un generico itema in retroazione con funzione di traferimento a ciclo chiuo.
Bode Diagram. 1.2 Determinare il valore del guadagno del sistema. Disegnare gli zeri ed i poli nel piano complesso.
 5 Luglio 3 econda prova Sia dato un itema dinamico con funzione di traferimento G(), i cui diagrammi di Bode, del modulo e della fae, ono di eguito rappreentati: 6 Bode Diagram Phae (deg) Magnitude (db)
5 Luglio 3 econda prova Sia dato un itema dinamico con funzione di traferimento G(), i cui diagrammi di Bode, del modulo e della fae, ono di eguito rappreentati: 6 Bode Diagram Phae (deg) Magnitude (db)
Esercitazione di Controlli Automatici 1 n 6
 4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
4 maggio 007 Eercitazione di Controlli Automatici n 6 a.a. 006/07 Si conideri il itema della eercitazione n 5 cotituito da un braccio robotico in rotazione, utilizzato per la movimentazione di oggetti.
Fondamenti di Automatica
 Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
Fondamenti di Automatica «Correzione Eonero 23/05/2019» Compito B Dario Maucci 28/05/2019 Traccia d eame (Eercizio 1 - Compito B) Dato il itema di controllo in figura u(t) + C() P 1 () + z + P 2 () y(t)
K c s h. P(s) 1/K d. U(s) + Y(s)
 1/K d. U(s) + Y(s)") Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Eame di Fondamenti di Automatica Coro di Laurea Vecchio Ordinamento in Ingegneria Elettronica febbraio 3 Compito A Cognome: Nome Matricola: Email:. Ricavare la funzione di traferimento tra u ed y nel eguente
Controllori PID. Fondamenti di Automatica Prof. Silvia Strada
 Controllori Fondamenti di Automatica rof. Silvia Strada efinizione controllori (ad azione roporzionale, ntegrale e erivativa) ono caratterizzati (idealmente) dalla legge di controllo: u ( t ) e( t ) e(
Controllori Fondamenti di Automatica rof. Silvia Strada efinizione controllori (ad azione roporzionale, ntegrale e erivativa) ono caratterizzati (idealmente) dalla legge di controllo: u ( t ) e( t ) e(
Esame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento) 16 Giugno 2008 (Bozza di soluzione)
 16 Giugno 2008 (Bozza di soluzione)") Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
Eame di FONDAMENTI di AUTOMATICA Compito B (Nuovo ordinamento 6 Giugno 28 (Bozza di oluzione NB. Si coniglia vivamente di ripaare anche argomenti non trettamente inerenti la materia oggetto della prova
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 21 NOVEMBRE d 2 (t) r(t) e(t) y(t) C(s)G(s)
 r(t) e(t) y(t) C(s)G(s)") ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
ESERCIZI DI CONTROLLI AUTOMATICI Prof. Gianluigi Pillonetto 2 NOVEMBRE 206 Ex. Si conideri il itema di controllo d (t) d 2 (t) C()G() K Calcolare le funzioni di traferimento che legano le eguenti coppie
Corso Tecnologie dei Sistemi di Controllo. Controllo PID
 Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
Coro Controllo PID Ing. Valerio Scordamaglia Univerità Mediterranea di Reggio Calabria, Loc. Feo di Vito, 896, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica e Traporti Struttura
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 2014
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 18 Luglio 14 Eercizio 1. [9 punti] Si conideri il modello ingreo/ucita a tempo continuo avente la eguente funzione di traferimento: ( 2 + 1)(
Esercizio. Il circuito di figura rappresenta un filtro passa-banda. Dopo aver ricavato la funzione di trasferimento, sapendo che
 Eercizio Clae 5ª Elettronici Materia Sitemi Argomento Funzioni di traferimento Il circuito di figura rappreenta un filtro paa-banda. Dopo aver ricavato la funzione di traferimento, apendo che R = 2k Ω
Eercizio Clae 5ª Elettronici Materia Sitemi Argomento Funzioni di traferimento Il circuito di figura rappreenta un filtro paa-banda. Dopo aver ricavato la funzione di traferimento, apendo che R = 2k Ω
1. (solo nuovo ordinamento e diploma) Dato il sistema di controllo raffigurato, con
 Dato il sistema di controllo raffigurato, con") Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Eame di Fondamenti di Automatica Coro di Laurea Nuovo e Vecchio Ord. in Ingegneria Elettronica Simulazione 9 Novembre 7 Cognome: Nome Matricola: E-mail: 1. (olo nuovo ordinamento e diploma) Dato il itema
Fondamenti di Automatica Figura 1: Schema di centrifuga industriale: a) vista in assonometria b) vista frontale.
 vista in assonometria b) vista frontale.") Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Fondamenti di Automatica 6-9-26 Figura : Schema di centrifuga indutriale: a) vita in aonometria b) vita frontale. A In Fig..a è riportato lo chema emplificato di una centrifuga orizzontale indutriale di
Lezione 9. Schemi di controllo avanzati parte prima. F. Previdi - Controlli Automatici - Lez. 9 1
 Lezione 9. Schemi di controllo avanzati parte prima F. Previdi - Controlli Automatici - Lez. 9 Schema. Regolatori in anello aperto Controllo multivariabile:. Regolatori di diaccoppiamento 3. Controllo
Lezione 9. Schemi di controllo avanzati parte prima F. Previdi - Controlli Automatici - Lez. 9 Schema. Regolatori in anello aperto Controllo multivariabile:. Regolatori di diaccoppiamento 3. Controllo
Prova del 30 Giugno Si consideri il seguente sistema dinamico a tempo continuo: Esercizio 1 = + + U
 Prova del Giugno 4 Eercizio. Si conideri il eguente itema dinamico a tempo continuo: x () t α x() t + u() t x () t x() t u() t x () t x() t x() t ( + α) x() t + u() t yt () x() t.a Si calcoli la funzione
Prova del Giugno 4 Eercizio. Si conideri il eguente itema dinamico a tempo continuo: x () t α x() t + u() t x () t x() t u() t x () t x() t x() t ( + α) x() t + u() t yt () x() t.a Si calcoli la funzione
Controlli Automatici (AUT) - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a
 - 09AKSBL. Progetto dinamico. Funzioni compensatrici elementari. Struttura di controllo con compensazione in cascata d a") Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Controlli Automatici (AUT) - 9AKSBL Funzioni compenatrici elementari Progetto di controllori in cacata Struttura di controllo con compenazione in cacata d a r + + e + C () + u + G() y - d y + dt + L obiettivo
Lezione 11. Progetto del controllore
 Lezione Progetto del controllore Specifiche di progetto Conideriamo nuovamente un itema di controllo in retroazione: d y + + + y () G() + + n Fig : Sitema di controllo Supporremo aegnata la funzione di
Lezione Progetto del controllore Specifiche di progetto Conideriamo nuovamente un itema di controllo in retroazione: d y + + + y () G() + + n Fig : Sitema di controllo Supporremo aegnata la funzione di
Criterio di stabilità di Bode. tramite la risposta in frequenza viene indicata come condizione di innesco dell instabilità la
 Criterio di tabilità di Bode Sia dato un itema retroazionato con f.d.t. eprea F( H ( tramite la ripota in frequenza viene indicata come condizione di inneco dell intabilità la G ( j H ( j 0 cioè G ( j
Criterio di tabilità di Bode Sia dato un itema retroazionato con f.d.t. eprea F( H ( tramite la ripota in frequenza viene indicata come condizione di inneco dell intabilità la G ( j H ( j 0 cioè G ( j
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
CONTROLLI AUTOMATICI L-B ESERCIZI SUL CONTROLLO IN RETROAZIONE Ing. Nicola Diolaiti DEIS-Univerità di Bologna Tel. 5 29379 / 68 e-mail: ndiolaiti@dei.unibo.it http://www-lar.dei.unibo.it/people/ndiolaiti
Introduzione. Esempio di costruzione one del contorno delle radici. Esempio... 4
 Appunti di Controlli Automatici 1 Capitolo 5 parte II Il contorno delle radici Introduzione... 1 Eempio di cotruzione del contorno delle radici... 1 Eempio... 4 Introduzione Il procedimento per la cotruzione
Appunti di Controlli Automatici 1 Capitolo 5 parte II Il contorno delle radici Introduzione... 1 Eempio di cotruzione del contorno delle radici... 1 Eempio... 4 Introduzione Il procedimento per la cotruzione
SEGNALI E SISTEMI 31 agosto 2017
 SEGNALI E SISTEMI 31 agoto 2017 Eercizio 1. [3+3+3+4 punti] Si conideri il modello ingreo/ucita LTI e cauale decritto dalla eguente equazione differenziale: dove a è un parametro reale. d 2 v(t) 2 +(1
SEGNALI E SISTEMI 31 agoto 2017 Eercizio 1. [3+3+3+4 punti] Si conideri il modello ingreo/ucita LTI e cauale decritto dalla eguente equazione differenziale: dove a è un parametro reale. d 2 v(t) 2 +(1
Regolazione e Controllo dei Sistemi Meccanici Figura 1: Schema di un montacarichi.
 Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Regolazione e Controllo dei Sitemi Meccanici 7-7-28 Figura : Schema di un montacarichi. Il itema in figura, cotituito da un motore elettrico azionante un verricello dove è avvolto un cavo di materiale
Corso di Fondamenti di Automatica A.A. 2015/16. Diagrammi di Bode
 1 Coro di Fondamenti di Automatica A.A. 015/16 Diagrammi di Bode Prof. Carlo Coentino Dipartimento di Medicina Sperimentale e Clinica Univerità degli Studi Magna Graecia di Catanzaro tel: 0961-3694051
1 Coro di Fondamenti di Automatica A.A. 015/16 Diagrammi di Bode Prof. Carlo Coentino Dipartimento di Medicina Sperimentale e Clinica Univerità degli Studi Magna Graecia di Catanzaro tel: 0961-3694051
CONTROLLO DIGITALE LAUREA TRIENNALE IN ING. INFORMATICA E DELL AUTOMAZIONE A.A. 2017/2018 LAUREA MAGISTRALE IN ING. ELETTRICA A.A.
 LAUREA TRIENNALE IN ING. INFORMATICA E DELL AUTOMAZIONE A.A. 7/8 LAUREA MAGISTRALE IN ING. ELETTRICA A.A. 7/8 APPELLO 9//8 Sia aegnata la eguente equazione alle differenze: y(k).3679y(k ) +.3679y(k ) =.3679u(k
LAUREA TRIENNALE IN ING. INFORMATICA E DELL AUTOMAZIONE A.A. 7/8 LAUREA MAGISTRALE IN ING. ELETTRICA A.A. 7/8 APPELLO 9//8 Sia aegnata la eguente equazione alle differenze: y(k).3679y(k ) +.3679y(k ) =.3679u(k
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 15 luglio 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 15 luglio 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
I sistemi retroazionati. Per lo studio si può utilizzarne uno a reazione unitaria per rendere standard i risultati:
 I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
I itemi retroazionati Facciamo riferimento allo chema a blocchi: Per lo tudio i può utilizzarne uno a reazione unitaria per rendere tandard i riultati: i due ono equivalenti: infatti il primo ha una f.d.t.
Lezione 18. Stabilità di sistemi retroazionati. F. Previdi - Fondamenti di Automatica - Lez. 18 1
 Lezione 18. Stabilità di itemi retroazionati F. Previdi - Fondamenti di Automatica - Lez. 18 1 Schema 1. Stabilità di itemi retroazionati 2. Diagramma di Nyquit 3. Criterio di Nyquit 4. Etenioni del Criterio
Lezione 18. Stabilità di itemi retroazionati F. Previdi - Fondamenti di Automatica - Lez. 18 1 Schema 1. Stabilità di itemi retroazionati 2. Diagramma di Nyquit 3. Criterio di Nyquit 4. Etenioni del Criterio
Sistemi di Controllo - Controlli Automatici (Parte B) Ingegneria Meccanica e Ingegneria del Veicolo
 Ingegneria Meccanica e Ingegneria del Veicolo") Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Cognome: Nome: N. Matr.: Sitemi di Controllo Controlli Automatici Ho uperato la Parte A in data(mee/anno) Intendo volgere la teina con Matlab/Simulink Sitemi di Controllo - Controlli Automatici (Parte
Sistemi di Regolazione
 Sitemi di Regolazione (vedi Marro Par. 6.9) (Vedi anche e. realizzati in Working Model 2D ed il file PD2.vi realizzato con LabView) Regolatori tandard Metodo di Ziegler - Nichol 3/9/2 G.U -FdA- U() = cotante
Sitemi di Regolazione (vedi Marro Par. 6.9) (Vedi anche e. realizzati in Working Model 2D ed il file PD2.vi realizzato con LabView) Regolatori tandard Metodo di Ziegler - Nichol 3/9/2 G.U -FdA- U() = cotante
Punto 1 Il sistema proposto di tipo retroazionato può essere rappresentato con lo schema a blocchi riportato in Fig. 1.
 Pag. di SOLUZIONE dei primi 4 punti richieti dalla Prova. Leggo bene il teto e poi? La mia Maetra mi diceva empre: Prima la figura. Punto Il itema propoto di tipo retroazionato può eere rappreentato con
Pag. di SOLUZIONE dei primi 4 punti richieti dalla Prova. Leggo bene il teto e poi? La mia Maetra mi diceva empre: Prima la figura. Punto Il itema propoto di tipo retroazionato può eere rappreentato con
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I
 SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof Bittanti, BIO A-K) Settembre Si conideri il eguente itema dinamico a tempo continuo decritto mediante chema a blocchi: ut () _ yt () 9 a Si calcoli la funione
SOLUZIONI PROVA SCRITTA DI AUTOMATICA I (Prof Bittanti, BIO A-K) Settembre Si conideri il eguente itema dinamico a tempo continuo decritto mediante chema a blocchi: ut () _ yt () 9 a Si calcoli la funione
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 213 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Sistemi di controllo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 11 ettembre 2014 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Esercitazioni di Controlli Automatici L-A
 Eercitazioni di Controlli Automatici L-A Progetto di un regolatore Data le eguente funzione di traferimento G(): G() = + 0 3 + 7. 2 + 0.7 + () i richiede di progettare un regolatore R() che poto in cacata
Eercitazioni di Controlli Automatici L-A Progetto di un regolatore Data le eguente funzione di traferimento G(): G() = + 0 3 + 7. 2 + 0.7 + () i richiede di progettare un regolatore R() che poto in cacata
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sitemi di Automazione rof. Gianmaria De Tommai Lezione 4 Regolatori ID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno
Facoltà di Ingegneria Tecnologie dei Sitemi di Automazione rof. Gianmaria De Tommai Lezione 4 Regolatori ID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno
Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo
 Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 febbraio 214 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Cognome: Nome: N. Matr.: Sitemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 febbraio 214 - Quiz Per ciacuno dei eguenti queiti, egnare con una crocetta le ripote che i ritengono
Pertanto la funzione di trasferimento complessiva in catena aperta (open-loop) W(S) del sistema di controllo sarà data da:
 W(S) del sistema di controllo sarà data da:") M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
M045 - EAME DI TATO 20 ) chema a blocchi e funzione di traferimento in catena aperta W() Il itema di controllo può eere chematizzato con il eguente chema a blocchi: dove: KP 3.2. V V Greg( ) KP (f.d.t.
Esercizi di Controlli Automatici - 9 A.A. 2009/2010
 Eercizi di Controlli Automatici - 9 A.A. 2009/200 Eercizio. Dato il eguente chema, in cui gli amplificatori operazionali ono uppoti ideali, i calcoli la funzione di traferimento G() tra v in (t) e v out
Eercizi di Controlli Automatici - 9 A.A. 2009/200 Eercizio. Dato il eguente chema, in cui gli amplificatori operazionali ono uppoti ideali, i calcoli la funzione di traferimento G() tra v in (t) e v out
Stabilità e punti di equilibrio
 Capitolo 4 Stabilità e punti di equilibrio 4. Stabilità di un itema epreo da un equazione di tato Si è motrato come un itema poa eere epreo con il itema cotituito dalle equazioni 3.6 e 3.7 ovvero: X()
Capitolo 4 Stabilità e punti di equilibrio 4. Stabilità di un itema epreo da un equazione di tato Si è motrato come un itema poa eere epreo con il itema cotituito dalle equazioni 3.6 e 3.7 ovvero: X()
Controllo di Azionamenti Elettrici. Lezione n 3. Caratteristiche e predisposizione dei regolatori PID
 Controllo di Azionamenti Elettrici Lezione n 3 Coro di Laurea in Ingegneria dell Automazione Facoltà di Ingegneria Univerità degli Studi di alermo Caratteritiche e predipoizione dei regolatori ID 1 Introduzione
Controllo di Azionamenti Elettrici Lezione n 3 Coro di Laurea in Ingegneria dell Automazione Facoltà di Ingegneria Univerità degli Studi di alermo Caratteritiche e predipoizione dei regolatori ID 1 Introduzione
Controlli Automatici LA Risposte dei sistemi
 //8 Controlli Automatici LA Analii dei itemi dinamici lineari Ripote al gradino di itemi tipici Relazioni Funzione di Traferimento/Ripote Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 5 93 Email: croi@dei.unibo.it
//8 Controlli Automatici LA Analii dei itemi dinamici lineari Ripote al gradino di itemi tipici Relazioni Funzione di Traferimento/Ripote Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 5 93 Email: croi@dei.unibo.it
COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI 1/(1+T) E T/(1+T) T T. non compensata compensata H V
 E T/(1+T) T T. non compensata compensata H V") COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI /(+T) E T/(+T) vˆ = = G G vg c vg vˆ + T vˆ g + G g c vref T + vˆ H + T vˆ ref Z ref c out iˆ Z load out + T iˆ load T non compenata compenata H ( ) Gvd ( ) V
COSTRUZIONE GRAFICA ASINTOTICA DEI FATTORI /(+T) E T/(+T) vˆ = = G G vg c vg vˆ + T vˆ g + G g c vref T + vˆ H + T vˆ ref Z ref c out iˆ Z load out + T iˆ load T non compenata compenata H ( ) Gvd ( ) V
SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei sistemi in retroazione
 SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei itemi in retroazione R E C G + - Y H G rappreenta il regolatore, l'amplificatore di potenza, l'attuatore ed il itema controllato e prende il
SIST DI CONTROLLO IN RETROAZ. NEGATIVA Proprietà generali dei itemi in retroazione R E C G + - Y H G rappreenta il regolatore, l'amplificatore di potenza, l'attuatore ed il itema controllato e prende il
Controlli Automatici LB Scenari di Controllo
 Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 51 2932 Email: croi@dei.unibo.it UR: www-lar.dei.unibo.it/~croi 1. come vincoli ulla funzione d'anello 2. Scenari di controllo 3. inee guida per il progetto
Prof. Carlo Roi DEIS-Univerità di Bologna Tel. 51 2932 Email: croi@dei.unibo.it UR: www-lar.dei.unibo.it/~croi 1. come vincoli ulla funzione d'anello 2. Scenari di controllo 3. inee guida per il progetto
Tecnologie Informatiche per l Automazione Industriale
 Tecnologie Informatiche per l Automazione Indutriale Prof. Gianmaria De Tommai Regolatori PID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno accademico N46
Tecnologie Informatiche per l Automazione Indutriale Prof. Gianmaria De Tommai Regolatori PID indutriali: Leggi di controllo e utilizzo Coro di Laurea Codice inegnamento Email docente Anno accademico N46
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito del Febbraio 206 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere l andamento temporale della funzione di ucita y(k), oluzione dell
Teoria dei Sitemi e del Controllo Compito del Febbraio 206 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere l andamento temporale della funzione di ucita y(k), oluzione dell
Modellistica e controllo PID di un pendolo inverso
 Modellitica e controllo PID di un pendolo invero Note per le lezioni del coro di Controlli Automatici - A.A. 2009/0 Prof.a Maria Elena Valcher Modellitica Un ata di maa m è incernierata ad un carrello
Modellitica e controllo PID di un pendolo invero Note per le lezioni del coro di Controlli Automatici - A.A. 2009/0 Prof.a Maria Elena Valcher Modellitica Un ata di maa m è incernierata ad un carrello
Lezione 18. Analisi delle prestazioni
 ezione 8. nalii delle pretazioni di itemi i retroazionati i c Senitività F. Previdi - utomatica - ez. 8 Schema. nalii tatica di S ripota allo calino 2. nalii tatica di S ripota alla rampa 3. Tabelle valori
ezione 8. nalii delle pretazioni di itemi i retroazionati i c Senitività F. Previdi - utomatica - ez. 8 Schema. nalii tatica di S ripota allo calino 2. nalii tatica di S ripota alla rampa 3. Tabelle valori
Lezione 17. Introduzione ai sistemi di controllo. F. Previdi - Fondamenti di Automatica - Lez. 17 1
 Lezione 17. Introuzione ai itemi i controllo F. Previi - Fonamenti i Automatica - Lez. 17 1 Schema 1. Sitemi i controllo in anello aperto e in anello chiuo 2. Requiiti i un itema i controllo 3. Analii
Lezione 17. Introuzione ai itemi i controllo F. Previi - Fonamenti i Automatica - Lez. 17 1 Schema 1. Sitemi i controllo in anello aperto e in anello chiuo 2. Requiiti i un itema i controllo 3. Analii
Esercizi di Segnali e Sistemi. GLI ESERCIZI 1,2,3,4,11 COSTITUISCONO UN TEMA D ESAME TIPICO
 Eercizi di Segnali e Sitemi. GLI ESERCIZI,2,3,4, COSTITUISCONO UN TEMA D ESAME TIPICO Eempio Conideriamo la funzione di traferimento G() = + Si calcoli la forma di Smith Mc-Millan. Soluzione: G() = N(),
Eercizi di Segnali e Sitemi. GLI ESERCIZI,2,3,4, COSTITUISCONO UN TEMA D ESAME TIPICO Eempio Conideriamo la funzione di traferimento G() = + Si calcoli la forma di Smith Mc-Millan. Soluzione: G() = N(),
Esercizi svolti di geometria delle aree Alibrandi U., Fuschi P., Pisano A., Sofi A. ESERCIZIO n.7
 ESERCZO n.7 Data la ezione cava riportata in Figura, determinare: a) gli ai principali centrali di inerzia; b) l ellie principale centrale di inerzia; c) il nocciolo centrale di inerzia. cm cm A#7 . Determinazione
ESERCZO n.7 Data la ezione cava riportata in Figura, determinare: a) gli ai principali centrali di inerzia; b) l ellie principale centrale di inerzia; c) il nocciolo centrale di inerzia. cm cm A#7 . Determinazione
coeff. della 1 colonna sono diversi da 0 il sistema è asintoticamente stabile;
 Sitemi Dinamici: Induttore: i = x, v = Lx Condenatore: i = Cx, v = x x = x x = p Maa: x =, dove x u = v M u = F x = x Ocillatore meccanico: x = (Kx M Dx + u), dove Pendolo: x = x x = g l in x + ml u k
Sitemi Dinamici: Induttore: i = x, v = Lx Condenatore: i = Cx, v = x x = x x = p Maa: x =, dove x u = v M u = F x = x Ocillatore meccanico: x = (Kx M Dx + u), dove Pendolo: x = x x = g l in x + ml u k
FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A ) Corso di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno
 Corso di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno") Voto Cognome/Nome & No. Matricola FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A. 25 26) Coro di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno PROVA DEL 8 SETTEMBRE
Voto Cognome/Nome & No. Matricola FONDAMENTI DI SISTEMI DINAMICI (prof. Vincenzo LIPPIELLO A.A. 25 26) Coro di Laurea in Ingegneria Elettronica e delle Telecomunicazioni - II anno PROVA DEL 8 SETTEMBRE
ERRORE STATICO. G (s) H(s) Y(s) E(s) X (s) YRET(s)
 H(s) Y(s) E(s) X (s) YRET(s)") Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Preciione a regime: errore tatico ERRORE STATICO Alimentazione di potenza E() YRET() G() Y() H() Per errore tatico i intende lo cotamento, a regime, della variabile controllata Y() dal valore deiderato.
Appunti ed esercitazioni di Microonde 2
 Appunti ed eercitazioni di Microonde Studio di una linea priva di perdite in regime impulivo di impedenza caratteritica =5Ω, chiua u di un carico R erie avente R==5Ω, =mh, =nf. Si aume come velocità di
Appunti ed eercitazioni di Microonde Studio di una linea priva di perdite in regime impulivo di impedenza caratteritica =5Ω, chiua u di un carico R erie avente R==5Ω, =mh, =nf. Si aume come velocità di
Luogo delle radici Ing. Alessandro Pisano
 Controlli autoatici uogo delle radici Ing. Aleandro iano piano@diee.unica.it Il luogo delle radici nace per riolvere il eguente problea: Dati due polinoi () e (), deterinare coe variano, al variare del
Controlli autoatici uogo delle radici Ing. Aleandro iano piano@diee.unica.it Il luogo delle radici nace per riolvere il eguente problea: Dati due polinoi () e (), deterinare coe variano, al variare del
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito A del 5 Febbraio 05 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione in forma chiua dell equazione differenziale ẋ(t) =
Teoria dei Sitemi e del Controllo Compito A del 5 Febbraio 05 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione in forma chiua dell equazione differenziale ẋ(t) =
Esempi Calcolo Antitrasformate
 Eempi Calcolo Antitraformate Note per il Coro di FdA - Info April, 05 Il punto focale del coiddetto metodo di Heaviide per l antitraformazione di un egnale regolare a traformata razionale conite nel riconocere
Eempi Calcolo Antitraformate Note per il Coro di FdA - Info April, 05 Il punto focale del coiddetto metodo di Heaviide per l antitraformazione di un egnale regolare a traformata razionale conite nel riconocere
Specifiche sulla banda passante negli amplificatori a microonde
 pecifiche ulla banda paante negli amplificatori a microonde Gli amplificatori a microonde trattano egnali modulati, il cui pettro ha in genere una etenione B molto minore della frequenza centrale f 0 (portante).
pecifiche ulla banda paante negli amplificatori a microonde Gli amplificatori a microonde trattano egnali modulati, il cui pettro ha in genere una etenione B molto minore della frequenza centrale f 0 (portante).
1_ Filtro passa-basso Con A(jw) si indica la funzione di trasferimento del filtro, il cui modulo A assume un valore costante
 si indica la funzione di trasferimento del filtro, il cui modulo A assume un valore costante") PPUNTI DI ELETTNIC FILTI TTII 6 Campi di applicazione I filtri nel ettore dell elettronica ono utilizzati per : attenuare i diturbi, il rumore e le ditorioni applicati al egnale utile; eparare due egnale
PPUNTI DI ELETTNIC FILTI TTII 6 Campi di applicazione I filtri nel ettore dell elettronica ono utilizzati per : attenuare i diturbi, il rumore e le ditorioni applicati al egnale utile; eparare due egnale
Fondamenti di Automatica per Ing. Elettrica
 Fondamenti di Automatica per Ing. Elettrica Prof. Patrizio Colaneri 2 Seconda prova in itinere del 22 Gennaio 28 Cognome Nome Matricola Firma Durante la prova non è conentita la conultazione di libri,
Fondamenti di Automatica per Ing. Elettrica Prof. Patrizio Colaneri 2 Seconda prova in itinere del 22 Gennaio 28 Cognome Nome Matricola Firma Durante la prova non è conentita la conultazione di libri,
2. METODO DEGLI SPOSTAMENTI O EQUAZIONE DELLA LINEA ELASTICA, PER LA SOLUZIONE DI TRAVI IPERSTATICHE
 METODO DEGLI SPOSTAMENTI CORSO DI PROGETTAZIONE STRUTTURALE B a.a. 00/0 Prof. G. Salerno Appunti elaborati da Arch. C. Provenzano. STRUTTURE IPERSTATICHE Una truttura i dice ipertatica o taticamente indeterminata
METODO DEGLI SPOSTAMENTI CORSO DI PROGETTAZIONE STRUTTURALE B a.a. 00/0 Prof. G. Salerno Appunti elaborati da Arch. C. Provenzano. STRUTTURE IPERSTATICHE Una truttura i dice ipertatica o taticamente indeterminata
Cap. IX: Progetto del Regolatore
 ap. IX: Progetto del Regolatore IX-: Introduzione La condizione di tabilità va vita come una condizione necearia da ripettare nel progetto del regolatore; da uno tudio i tabilità i hanno informazioni utili
ap. IX: Progetto del Regolatore IX-: Introduzione La condizione di tabilità va vita come una condizione necearia da ripettare nel progetto del regolatore; da uno tudio i tabilità i hanno informazioni utili
ω 1+ ω ω = = 1 = G Vi = = Calcolo dell uscita del circuito di figura: Si definisce Funzione di Trasferimento il rapporto tra Uscita ed Ingresso:
 DIARAMMI DI BODE alcolo dell ucita del circuito di figura: X j j Vo Vi Vi Vi R X jr R j j Vi jr Si definice Funzione di Traferimento il rapporto tra Ucita ed Ingreo: Vo Vo [] FdT j Vi Vi jr Vo Vi Vo Vi
DIARAMMI DI BODE alcolo dell ucita del circuito di figura: X j j Vo Vi Vi Vi R X jr R j j Vi jr Si definice Funzione di Traferimento il rapporto tra Ucita ed Ingreo: Vo Vo [] FdT j Vi Vi jr Vo Vi Vo Vi
Prestazioni di sistemi di controllo con feedback. Fondamenti di Automatica Prof. Silvia Strada
 Pretazioni di itemi di controllo con feedback Fondamenti di Automatica Prof. Silvia Strada Sommario Requiiti dinamici Pretazioni dinamiche Requiiti tatici Pretazioni tatiche 2 Ipotei di bae - w - y Nello
Pretazioni di itemi di controllo con feedback Fondamenti di Automatica Prof. Silvia Strada Sommario Requiiti dinamici Pretazioni dinamiche Requiiti tatici Pretazioni tatiche 2 Ipotei di bae - w - y Nello
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito A del 23 Dicembre 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Indicare il numero e il tipo di parametri che caratterizzano la funzione
Teoria dei Sitemi e del Controllo Compito A del 23 Dicembre 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Indicare il numero e il tipo di parametri che caratterizzano la funzione
Fondamenti di automatica. Fondamenti di automatica. Corso di Laurea in Ingegneria Aerospaziale (Vecchio Ordinamento) Raccolta di temi d esame
 Raccolta di temi d esame") Fondamenti di automatica (Prof Rocco) Coro di Laurea in Ingegneria Aeropaziale (Vecchio Ordinamento) Fondamenti di automatica (Prof Rocco) Appello del Cognome: Nome: Raccolta di temi d eame Matricola:
Fondamenti di automatica (Prof Rocco) Coro di Laurea in Ingegneria Aeropaziale (Vecchio Ordinamento) Fondamenti di automatica (Prof Rocco) Appello del Cognome: Nome: Raccolta di temi d eame Matricola:
Capitolo. Il comportamento dei sistemi di controllo in regime permanente. 6.1 Classificazione dei sistemi di controllo. 6.2 Errore statico: generalità
 Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Capitolo 6 Il comportamento dei itemi di controllo in regime permanente 6. Claificazione dei itemi di controllo 6. Errore tatico: generalità 6. Calcolo dell errore a regime 6.4 Eercizi - Errori a regime
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi Teoria dei Sitemi e del Controllo Compito A del 24 Giugno 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Nel cao di itemi lineari continui tempo-varianti, la matrice
Teoria dei Sitemi Teoria dei Sitemi e del Controllo Compito A del 24 Giugno 200 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Nel cao di itemi lineari continui tempo-varianti, la matrice
Sistemi a segnali campionati
 Capitolo. INRODUZIONE 6. Sitemi a egnali campionati Si conideri il eguente itema lineare tempo continuo: G() : ẋ(t) Ax(t)+Bu(t) y(t) Cx(t) U() G() Y() Se i inerice un ricotruttore di ordine zero H () e
Capitolo. INRODUZIONE 6. Sitemi a egnali campionati Si conideri il eguente itema lineare tempo continuo: G() : ẋ(t) Ax(t)+Bu(t) y(t) Cx(t) U() G() Y() Se i inerice un ricotruttore di ordine zero H () e
Progetto di reti correttrici e controllori PID e traduzione nel discreto con il metodo di emulazione
 Progetto di reti correttrici e controllori PID e traduione nel dicreto con il metodo di emulaione Eerciio. Si conideri lo chema di controllo rappreentato in figura dove P () = con a = 40. a + r(t) + S
Progetto di reti correttrici e controllori PID e traduione nel dicreto con il metodo di emulaione Eerciio. Si conideri lo chema di controllo rappreentato in figura dove P () = con a = 40. a + r(t) + S
Lezione 25 - Flessione deviata e sforzo normale eccentrico
 Lezione 5 - Fleione deviata e forzo normale eccentrico ü [A.a. 011-01 : ultima reviione 1 gennaio 01] Con lo tudio della fleione fuori del piano i e' eaurito l'eame delle ollecitazioni emplici di De Saint
Lezione 5 - Fleione deviata e forzo normale eccentrico ü [A.a. 011-01 : ultima reviione 1 gennaio 01] Con lo tudio della fleione fuori del piano i e' eaurito l'eame delle ollecitazioni emplici di De Saint
Lezione 31. Cenni di controllo digitale. F. Previdi - Fondamenti di Automatica - Lez. 31 1
 Lezione 31. Cenni di controllo digitale F. Previdi - Fondamenti di Automatica - Lez. 31 1 Schema 1. Introduzione 2. Campionamento e Tenuta 3. Aliaing 4. Teorema del campionamento 5. Progetto mediante dicretizzazione
Lezione 31. Cenni di controllo digitale F. Previdi - Fondamenti di Automatica - Lez. 31 1 Schema 1. Introduzione 2. Campionamento e Tenuta 3. Aliaing 4. Teorema del campionamento 5. Progetto mediante dicretizzazione
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.
 Teoria dei Sitemi e del Controllo Compito del 2 Dicembre 25 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione generale della eguente equazione alle differenze tempo-variante
Teoria dei Sitemi e del Controllo Compito del 2 Dicembre 25 Domande ed eercizi Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec.. Scrivere la oluzione generale della eguente equazione alle differenze tempo-variante
Uso della trasformata di Laplace per il calcolo della risposta
 Uo della traformata di Laplace per il calcolo della ripota Conigli generali (Aggiornato 7//) ) Si vuole qui richiamare l attenzione ul fatto che la preenza di zeri o di una truttura triangolare a blocchi
Uo della traformata di Laplace per il calcolo della ripota Conigli generali (Aggiornato 7//) ) Si vuole qui richiamare l attenzione ul fatto che la preenza di zeri o di una truttura triangolare a blocchi
Discretizzazione del controllore
 Dipartimento di Ingegneria Dicretiaione del controllore Michele Ermidoro Ingegneria dei itemi di controllo - Senori Perchè dicretiare? Introduione Il paaggio al mondo dicreto è neceario e i vuole implementare
Dipartimento di Ingegneria Dicretiaione del controllore Michele Ermidoro Ingegneria dei itemi di controllo - Senori Perchè dicretiare? Introduione Il paaggio al mondo dicreto è neceario e i vuole implementare
Lezione 25 - Flessione deviata e sforzo normale eccentrico
 Lezione 5 - Fleione deviata e forzo normale eccentrico [Ultimareviione: reviione:0 0gennaio gennaio009] Con lo tudio della fleione fuori del piano i e' eaurito l'eame delle ollecitazioni emplici di De
Lezione 5 - Fleione deviata e forzo normale eccentrico [Ultimareviione: reviione:0 0gennaio gennaio009] Con lo tudio della fleione fuori del piano i e' eaurito l'eame delle ollecitazioni emplici di De
Trasformazione di Laplace
 Traformazione di Laplace Gabriele Sicuro. Definizioni fondamentali Sia data una funzione f : C; ea i dice originale e ono oddifatte le eguenti condizioni: () f (t) per t
Traformazione di Laplace Gabriele Sicuro. Definizioni fondamentali Sia data una funzione f : C; ea i dice originale e ono oddifatte le eguenti condizioni: () f (t) per t
Corso di Microonde II
 POLITECNICO DI MILANO Coro di Microonde II Lezi n. 4: Progetto amplificatori Lineari a ingolo tadio Progetto di Amplificatori con dipoitivi potenzialmente intabili Nel cao di dipoitivi potenzialmente intabili,
POLITECNICO DI MILANO Coro di Microonde II Lezi n. 4: Progetto amplificatori Lineari a ingolo tadio Progetto di Amplificatori con dipoitivi potenzialmente intabili Nel cao di dipoitivi potenzialmente intabili,
Filtri attivi 1 V R 1. Dell op.amp. V o. V i. H db
 Filtri attivi Filtri attivi Un filtro attivo del primo ordine (paa BASSO o paa ALTO) può eere realizzato collegando, all'ingreo di un amplificatore NON invertente con operazionale, una cella filtrante
Filtri attivi Filtri attivi Un filtro attivo del primo ordine (paa BASSO o paa ALTO) può eere realizzato collegando, all'ingreo di un amplificatore NON invertente con operazionale, una cella filtrante
Sintesi tramite il luogo delle radici
 Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Sintei tramite il luogo delle radici Può eere utilizzata anche per progettare itemi di controllo per itemi intabili Le pecifiche devono eere ricondotte a opportuni limiti u %, ta, t di W(), oltre quelle
Oscillatori sinusoidali /1
 //6 Ocillatori inuoidali / Un ocillatore inuoidale è un itema decritto da una coppia di poli immaginari coniugati. A(j) f (j) Un amplificatore lineare può eere chiuo in un anello di reazione per realizzare
//6 Ocillatori inuoidali / Un ocillatore inuoidale è un itema decritto da una coppia di poli immaginari coniugati. A(j) f (j) Un amplificatore lineare può eere chiuo in un anello di reazione per realizzare
Controlli automatici. Funzioni di trasferimento, schemi a blocchi e sistemi elementari. Ing. Alessandro Pisano
 Controlli automatici Funzioni di traferimento, chemi a blocchi e itemi elementari Ing. Aleandro Piano piano@diee.unica.it Una Fd è, per definizione, il rapporto tra la dl dell ucita e la dl dell ingreo.
Controlli automatici Funzioni di traferimento, chemi a blocchi e itemi elementari Ing. Aleandro Piano piano@diee.unica.it Una Fd è, per definizione, il rapporto tra la dl dell ucita e la dl dell ingreo.
Introduzione a Matlab/Simulink
 Introduzione a Matlab/Simulink Robotica Indutriale Prof. P. Rocco a.a.2003/2004 Ing. M. Gritti e Ing. L. Bacetta Introduzione a Matlab Contenuti Preentazione Control Sytem Toolbox Introduzione a Simulink
Introduzione a Matlab/Simulink Robotica Indutriale Prof. P. Rocco a.a.2003/2004 Ing. M. Gritti e Ing. L. Bacetta Introduzione a Matlab Contenuti Preentazione Control Sytem Toolbox Introduzione a Simulink
Modellizzazione e controllo
 Scuola univeritaria profeionale della Svizzera italiana Dipartimento Tecnologie Innovative Gianluca Montù e Mikael Bianchi 2 Gianluca Montù e Mikael Bianchi Indice Modellizzazione di itemi elettromeccanici
Scuola univeritaria profeionale della Svizzera italiana Dipartimento Tecnologie Innovative Gianluca Montù e Mikael Bianchi 2 Gianluca Montù e Mikael Bianchi Indice Modellizzazione di itemi elettromeccanici
CONTROLLI AUTOMATICI Ingegneria Gestionale LUOGO DELLE RADICI
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm LUOGO DELLE RADICI Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm LUOGO DELLE RADICI Ing. Federica Grossi Tel. 059 2056333 e-mail: federica.grossi@unimore.it
Sistemi dinamici a tempo discreto
 Sitemi dinamici a tempo dicreto Fondamenti di tomatica Prof. Silvia Strada Coro di Stdi in Ingegneria Getionale Cognomi H PO Rappreentazione il tempo dicreto è, che ame valori interi f,, g,, eqazione di
Sitemi dinamici a tempo dicreto Fondamenti di tomatica Prof. Silvia Strada Coro di Stdi in Ingegneria Getionale Cognomi H PO Rappreentazione il tempo dicreto è, che ame valori interi f,, g,, eqazione di
MATEMATICA E STATISTICA CORSO A I COMPITINO (Tema 3) 28 Novembre 2008
 28 Novembre 2008") MATEMATICA E STATISTICA CORSO A I COMPITINO (Tema 3) 28 Novembre 2008 Soluzioni 1.(4 punti) L indice di maa corporea (IMC) è ottenuto dal rapporto tra maa, eprea in Kg, e l altezza al quadrato, eprea in
MATEMATICA E STATISTICA CORSO A I COMPITINO (Tema 3) 28 Novembre 2008 Soluzioni 1.(4 punti) L indice di maa corporea (IMC) è ottenuto dal rapporto tra maa, eprea in Kg, e l altezza al quadrato, eprea in
Errori e cifre significative. Incontro iniziale LAB2GO
 Errori e cifre ignificative Incontro iniziale LABGO La ditribuzione gauiana f tinyurl.com/labcalcquiz Propagazione degli errori Miure dirette: la grandezza fiica viene miurata direttamente (ad e. Speore
Errori e cifre ignificative Incontro iniziale LABGO La ditribuzione gauiana f tinyurl.com/labcalcquiz Propagazione degli errori Miure dirette: la grandezza fiica viene miurata direttamente (ad e. Speore
MATEMATICA E STATISTICA CORSO A I COMPITINO (Tema 1) 28 Novembre 2008
 28 Novembre 2008") MATEMATICA E STATISTICA CORSO A I COMPITINO (Tema 1) 28 Novembre 2008 SOLUZIONI 1. (4 punti) L indice di maa corporea (IMC) è ottenuto dal rapporto tra maa, eprea in Kg, e l altezza, eprea in m, al quadrato.
MATEMATICA E STATISTICA CORSO A I COMPITINO (Tema 1) 28 Novembre 2008 SOLUZIONI 1. (4 punti) L indice di maa corporea (IMC) è ottenuto dal rapporto tra maa, eprea in Kg, e l altezza, eprea in m, al quadrato.
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Problematiche di controllo digitale. Progetto di un controllore digitale
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Problematiche di controllo digitale Prof. Carlo Roi DEIS - Univerità di Bologna Tel: 5 2932 email: croi@dei.unibo.it Progetto di un controllore digitale
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Problematiche di controllo digitale Prof. Carlo Roi DEIS - Univerità di Bologna Tel: 5 2932 email: croi@dei.unibo.it Progetto di un controllore digitale